
基于ARM的混合动力汽车在线数据采集与监控系统
2013-10-15 01:20罗国富刘小娟杨文超
制造业自动化 2013年15期
罗国富,刘小娟,段 瑞,杨文超
(郑州轻工业学院 机电工程学院,郑州 450002)
0 引言
混合动力汽车作为新能源汽车的一种重要形式,在节能和环保方面的贡献越来越得到人们的认可,和国外相比,我国的新能源汽车发展状况尚处在起步阶段,和人们相对比较理想的纯电动汽车相比,混合动力汽车的发展还有很长一段路要走[1],一些关键技术现在还没有完全成熟,可靠性、耐久性、节能比例还有待进一步提高,因此需要及时了解车辆运行中的信息,监控车辆运行中的状态。文献[2]介绍了微处理器S3C2440和CAN 总线控制器SJA1000 构建CAN 通信电路,采用CPLD实现接口时序设计的方法,这一点是非常有意义的。文献[3]阐述了几种数据采集及分析方法,该文以德国西门子公司(SIEMENS)的S-200PLC为核心处理硬件,用PLC软件编程和FameView监控系统开发,实现了所需功能,但是系统不利于扩展。文献[4]基于混合动力电动汽车CAN网络的在线数据采集系统研究,该数据系统基于CAN 网络对数据进行采集分析,并能用SD卡的优势进行存储SD卡中,实用性强。文献[5]针对三种不同结构形式的混合动力车参数分别提出了不同的方案,然后对采集到的数据进行综合评定,由于不同系统存在不同的结构及不同传输协议,设计出通用型的混合动力电动汽车数据采集系统仍需努力。文献[6]利用GPRS无线网络结合整车CAN总线,满足了远程监测的需要,可以和3G网络结合进一步提高数据传输的速度和流量。文献[7]中电动车用CAN网络数据记录系统的设计,该系统基于嵌入式主机,能够实时地将数据存储在U盘中,即插即用。对其他系统有一定的参考意义。文献[8]选用ARM 9—2440芯片作为数据采集与发送的核心芯片,完成系统硬件平台的搭建,在ADS开发环境下,编写调试程序,完成数据采集及传输,但系统应结合FlexRay总线技术和3G网络通信技术,在传输速率和信号稳定性方面能保障数据信息的实时性和可靠性;对采集的数据的管理应该和数据库技术结合在一起,便于查找;系统的智能化仍需进一步提高。本文综合以上各个系统的优缺点,开发了基于ARM的混合动力汽车数据采集与监控系统。
建立基于ARM的混合动力汽车的在线数据采集与监控系统,符合国家新能源汽车构建以信息化、标准化、产业化为特征的战略发展目标[9]。建立统一的平台把已有的和新产生的实时的系统数据进行采集、存储和传输,按照信息化的标准为国家新能源汽车和市新能源汽车管理层提供现场运行的各种基础数据,为企业生产厂家进一步改善新能源汽车提供帮助,推动新能源汽车产业化发展。
1 系统结构设计
本文所设计的数据采集及监控系统应用在混合动力汽车的整车分布式CAN网络中,它涉及到数据采集、数据管理、平台搭建、接口设计等多方面的内容,是一项复杂的系统工程。系统作为一个节点接在CAN网络上,对整个CAN网络上的节点数据进行采集、存储和传输。混合动力汽车包括很多控制单元,它们也作为节点连接在CAN网络上,主要包括有:发动机电控单元(ECU)、整车控制单元(HCU)、电机控制单元(IPU)、电池控制单元(BCM)、变速箱控制单元(TCU)、显示控制单元(DCU)、转向角传感器、制动防抱死控制单元(ABS)。这个系统结构图如图1所示。
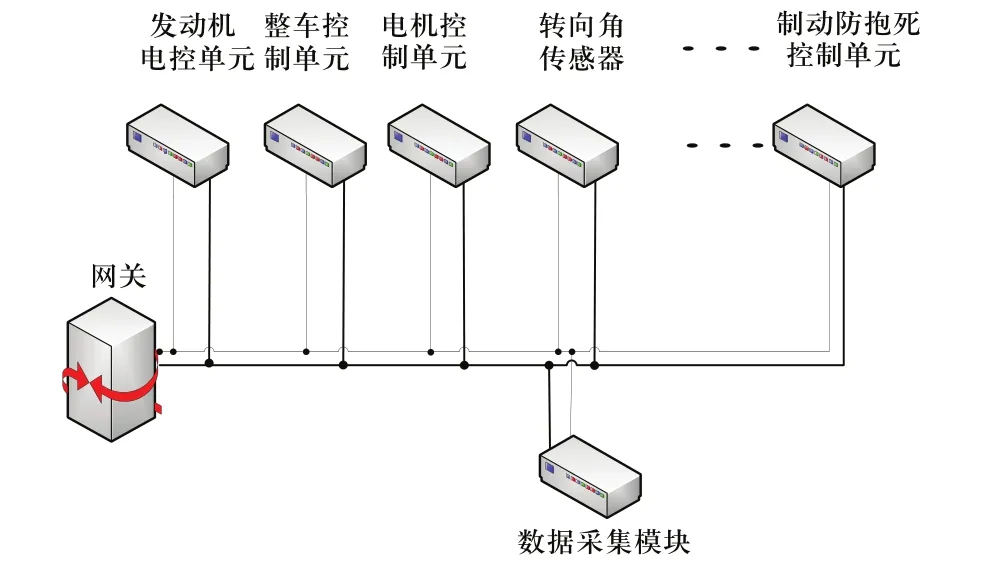
图1 系统结构图
2 数据采集硬件设计
该系统在数据采集方法基础上,结合本系统要求,考虑到系统安全性、实时性、可靠性、易维护性、可扩展性方面的需要,基于模块化的设计方法,设计出了系统硬件结构图如图2所示。
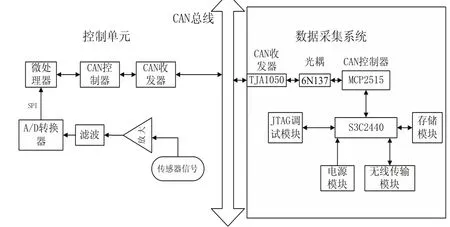
图2 数据采集硬件结构图
选定采用S3C2440作为为核处理器,具有高速运算和处理能力,能够满足系统数据实时计算和处理的能力。S3C2440集成化程度高,它集成了3个通道UART、4个通道的DMA、4个具有PWM功能的计时器和一个内部时钟、8通道的10位ADC、一个LCD控制器、SDRAM控制器。另外,它还有许多丰富的外部接口,例如触摸屏接口、摄像头接口、两个USB主机接口、一个USB设备接口、SD卡接口、两个SPI接口等,因此也大量减少了外部电路。由于S3C2440最大工作时钟频率为533MHz,而外面的晶振只有几十兆,因此在ARM中要做倍频处理。对于其他含有RS232接口或者RS485接口设备,可通过MAX232或者MAX485完成核微处理器和该设备之间的电平转换。
图3给出了CAN 模块接口电路图。CAN通信模块是主要由CAN控制器MCP2515和CAN 收发器TJA 1050组成。为增强系统的抗干扰性,提高系统的稳定性,在CAN控制器和CAN收发器之间加入光耦6N137。由于微处理器采用该芯片的I/O口工作电压为3.3V,核心工作电压为1.8V,存储模块的工作电压为3.3V,而汽车上的电压为12V,因此要进行相应的转换,此工作由电源模块完成。无线通信模块采用CONEXTOP(凌创)产品WgBoard 3G模块, 利用它,任何带有标准串口的设备都可以轻松连入3G/3.5G网络。
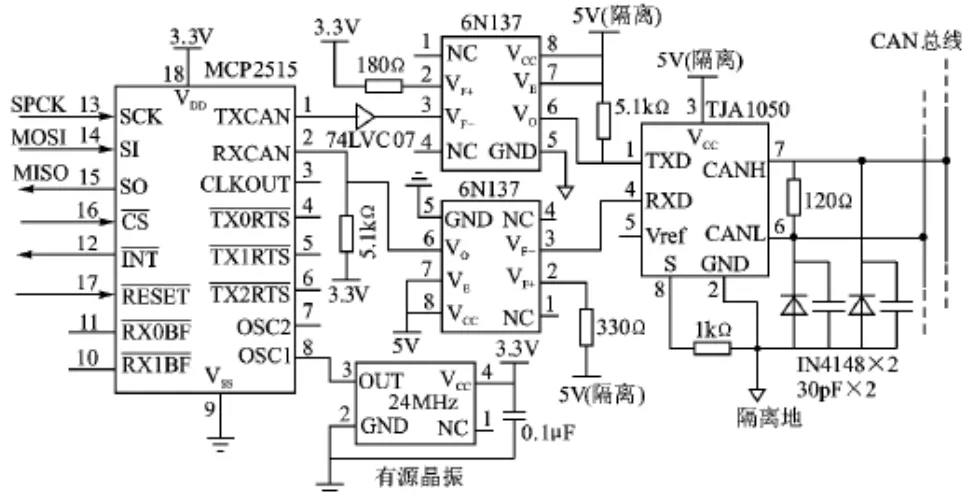
图3 CAN模块接口电路图
3 系统软件设计
通过软件设计,主要完成数据采集、数据通信与传输、实时数据处理、参数设置、数据实时监测、数据实时显示等功能,如图4所示。

图4 系统软件功能框图
1)数据采集
混合动力汽车中的各个控制单元通过CAN总线进行数据交换。在其他控制单元中,传感器信号按照DAVE(程序编写软件)可视化软件编好的C语言程序经过放大、滤波、A/D转换处理,存储到微控制器中的输入存储器中,然后存储器内的数据会被CPU运算处理,然后存入输出存储器,至此完成数据计算过程。CAN 收发器将CAN控制器产生的数据信号转换为适合在CAN总线上的发送信号发送出去。此时,一个控制单元产生的信号就到达CAN 总线上了。数据采集系统中收发器接收CAN总线上的数据并将数据传送到CAN 控制器,然后经S3C2440内部处理后,通过接口读入到核存储器,做进一步处理和分析。
2)数据通信与传输
数据通信与传输功能是通过3G 模块实现的,采用CONEXTOP(凌创)面向3G/3.5G网络而推出的高速串口接入Inernet传输的产品,它能同时传送TCP/UDP包给多个数据接收设备,是一种高性能串口联网模块,保证在所有串口在最高波特率下双向全速不间断传输数据不丢包,支持4路高速串口,波特率高达921600bps。提供多种配置管理通道,同时支持串口AT命令配置,Web配置,以及跨网段任意IP管理配置的设备管理软件。我们可根据需要,设置一定的时间间隔来传输采集到的数据。
3)数据实时处理模块
实时数据处理模块是将接收到的数据按照一定的协议进行解码并将其存在数据库里一个过程。
4)参数设置
参数设置模块可以使得用户自行设置采样间隔时间和其它控制参数。本系统平台实时数据采集和互动响应时间不大于2分钟。
5)数据实时监测
监控中心可设定监控的间隔跟踪任何车辆,被监控的车辆将按照中心设置的时间间隔自动回复车辆的位置、行驶速度、运行方向、时间等信息到监控中心,监控中心可实现24小时实时监控车辆运行情况。
6)数据实时显示
实时数据显示的功能是将数据通过曲线图或者表格的形式及时的将系统获得的数据显示出来,以便监视和分析车辆异常情况。
4 应用案例
本文开发的基于ARM的混合动力汽车数据采集与监控系统,在郑州市混合动力汽车运行线路从火车站到郑大新区南门的B12路公交上得到了应用。现将其运行中的情况进行介绍。
首先,从经济性、动力性能方面考虑,采集相关方面的信号,并根据采集到的信号作出百公里耗电量图、车辆功率图。图5为车辆百公里耗电量图,车号分别为4423、4425、4429,图6为车辆功率图,车号为4423。
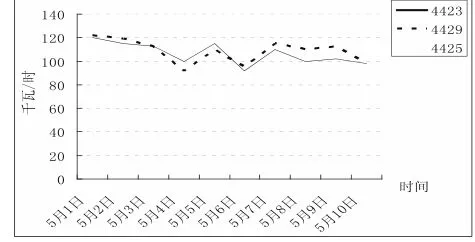
图5 车辆百公里耗电量
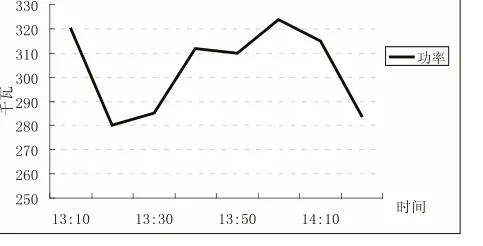
图6 车辆功率图
在监控方面,采用点、线、面相结合的方式,建立立体化网络监控网络。将单个车辆作为一个点,车辆运营线路作为线,整个示范运营车辆的运营状态作为一个面进行监控。监控中心可根据需要调取任一运营车辆的运行监控图像,以车号为5125的B12 车辆为例进行说明,如图7 所示。
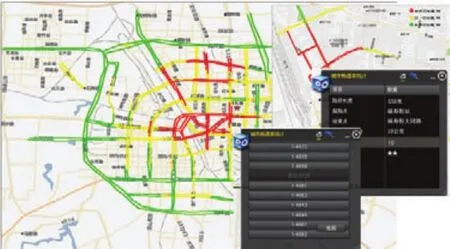
图7 车辆监控图像
5 结束语
基于ARM的混合动力汽车数据采集与监控系统在郑州市混合动力汽车运行线路28路及B12路上得到了应用,验证了其实用性。试验表明,系统能够完成对新产生的数据实时采集、存储和传输,整个系统扩展性强、运行稳定、便于程序维护和系统升级。
[1] 崔胜民,韩家军.新能源汽车概论[M].北京:北京大学出版社,2011,5.
[2] 聂火勇,钟思琦.基于ARM卡的CAN总线接口设计与实现[J].机车电传动,2010,(1).
[3] 陈勇.混合动力电动车数据采集及分析管理系统的研制[D].武汉理工大学,2006.
[4] 张荫先,罗玉涛,赵克刚,魏建军,. 基于混合动力电动汽车CAN网络的在线数据采集系统研究[J].机床与液压,2008,(4).
[5] 熊伟威,张勇,舒杰.基于CAN总线的分布式控制网络在串并联式混合动力客车上的应用[J]. 汽车工程,2008,(8).
[6] 杨亚联,曹紫微.混合动力车辆远程采集监控系统的研发[J]. 重庆理工大学学报(自然科学版),2010,(4).
[7] 谢长君.电动车用CAN网络数据记录系统的设计[J].武汉理工大学学报(信息与管理工程版),2006,(6).
[8] 吴晶晶.纯电动汽车车载信息的采集与远程监测系统的研发[D]. 南昌大学,2012.
[9] 王金丽,盛万兴,王金宇,杨洪磊,宋祺鹏.中低压配电网统一数据采集与监控系统设计和实现[J].电力系统自动化,2012,(18).
[10] 李念强,等.数据采集与系统设计[M].北京:机械工业出版社,2009,2.
猜你喜欢
现代装饰(2022年5期)2022-10-13
中学生数理化·七年级数学人教版(2021年10期)2021-11-22
数学小灵通(1-2年级)(2020年4期)2020-06-24
电子制作(2018年11期)2018-08-04
故事作文·高年级(2017年10期)2017-10-19
小学阅读指南·低年级版(2016年1期)2016-09-10
空间控制技术与应用(2015年2期)2015-06-05
舰船科学技术(2015年8期)2015-02-27
中国卫生(2014年12期)2014-11-12
汽车维护与修理(2014年10期)2014-02-28
