
震后救援机器人结构设计
2013-10-15 01:20刘建君尚伟燕叶川崎黄权荣魏建伟
制造业自动化 2013年15期
刘建君,尚伟燕,叶川崎,黄权荣,魏建伟
(宁波工程学院 机械学院,宁波 315016)
0 引言
全世界每年都遭受着大量自然灾害和人为灾害的破坏。巨大的灾害会造成大面积的建筑物坍塌和人员伤亡,灾害发生之后最紧急的事情就是搜救那些被困在废墟中的幸存者。然而,复杂危险的灾害现场给救援人员及幸存者带来了巨大的安全威胁,也会阻碍救援工作快速有效地进行。使用救援机器人进行辅助搜救是解决这一难题的有效手段[1~3]。为提高救援效率,一方面要求救援机器人有能力穿越震后废墟的复杂环境搜寻幸存者,并获取幸存者所处环境相关信息,因而其行走机构需具备可靠的越障能力和狭窄空间通过能力;另一方面要求救援机器人可以携带少量救援物资送达幸存者身边,从而赢得宝贵救援时间。因此,研究震后救援机器人行走机构及物资供给机构,可以提高救援的效率和可靠性,具有重要的现实意义。
1 机器人车体部分的设计
机器人在不平地面状况下行走时,为确保车身不发生侧翻,左右轮距需要保持足够间距。但救援机器人在行进过程中通常会遇到狭窄地形,车身宽度往往会限制机器人正常通过。因此,如果在机器人上安装一个变距装置,其左右轮间距可根据需要随时调整,可以提高机器人的复杂地面通过能力。
1.1 变距结构的设计
变距装置的主要结构是螺套螺杆副,其结构简图如图1所示。
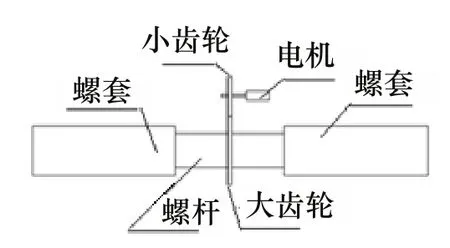
图1 螺纹螺杆变距结构简图
从图1中可以看出,该变距结构包括左右两个对称安装的螺套结构,左右两个螺套中螺纹旋向相反,中间的螺杆可在电机驱动下转动。轴上安装感应装置,以确保变距的精确性。其结构如图2所示。

图2 行走系统结构简图
变距时,左右轮同步等速撑开,使得左右轮关于车体纵向中心线时刻保持对称,可以确保左右轮撑开时机器人重心不会发生偏移,从而实现机器人复杂环境的稳定行进。变距结构中驱动电机安装于车体上,左右螺套分别固定安装于左右轮支承架上。
1.2 移动系统结构设计
目前,机器人的移动系统主要有:轮式、腿式、履带式[4]。轮式的移动系统具有机械结构简单、移动速度快和易控制的特点,但是对于复杂环境的适应能力差;腿式移动系统虽具有很强的地面适应性和较好的机动性,但是该形式移动系统运动速度慢,控制复杂[5,6];履带式移动系统具有良好的越障性能及较强的适应性。因此,设计中考虑采用履带式移动系统,符合救援机器人在行驶稳定性和复杂地面适应性上的要求。考虑到复杂行驶环境和安装空间限制,行走系统设计方案最终确定的结构如图3所示。
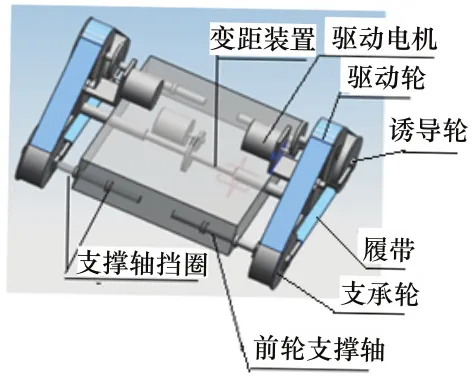
图3 行走系统结构简图
由图3可以看出,主动轮支承于前后轮之间的支承架上,驱动电机支架也固联于支承架上,前后轮分别与前后轮支承轴通过键联接。驱动轮置于行走系统上方降低了地面冲击对驱动电机及减速齿轮的影响,有利于提高机器人行驶稳定性,同时可以提高移动系统在复杂环境下工作的安全性和稳定性。驱动轮、诱导轮和支承轮上加工有轮齿,可以防止打滑,提高电动机扭矩的传递效率。前后轮支承轴通过轴承支承于车身上,其中支承轴与轴承内圈形成间隙配合,中间加涂润滑油减少摩擦,便于变距过程中前后轮支承轴相对车身左右滑动;前后轮支承轴上装有支承轴挡圈,左右轮距最小时,靠两侧外支承轴挡圈限制车身的横向串动,左右轮距最大时,靠两侧内支承轴挡圈限制车身的横向串动。
2 救援物质运输装置的设计
震后救援机器人在不同情况下,需要的救援物资各不相同。因此救援机器人的物资输送系统需要有较高的环境适应能力,从而完成不同的作业要求。本设计中救援机器人采用的是混合式物质输送装置。该装置包括救援物资储运装置和机械手两部分结构,其结构布置如图4所示。
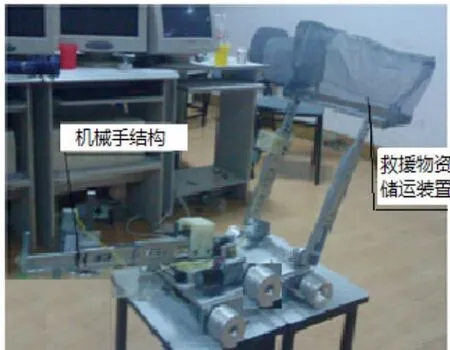
图4 混合式救援物资输送装置结构布置
其中,救援物资储运装置主要起到贮存不同种类救援物资的作用,其结构如图5所示。
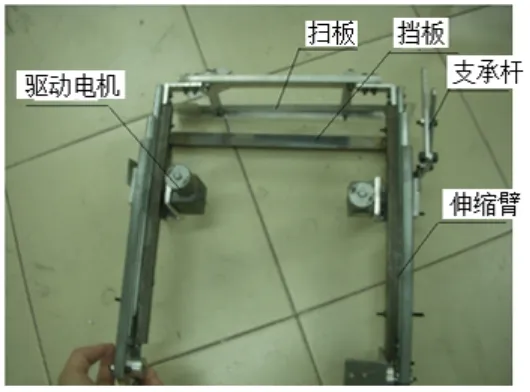
图5 救援物资储运装置
该救援装置伸缩臂部分由两个直流电机同步驱动。伸缩臂由两节滑道组成。下滑道上安装直流驱动电机及齿轮,上滑道安装齿条,在电机驱动下齿条可以实现前后滑移,可将救援物资直接运输到被救援对象面前,或者在机械手的协助下抓取物资送达被救援对象。机械臂结构是抓取装置设计中另外一个重要环节。机械臂结构中包括五个自由度,结构简图如图6所示。
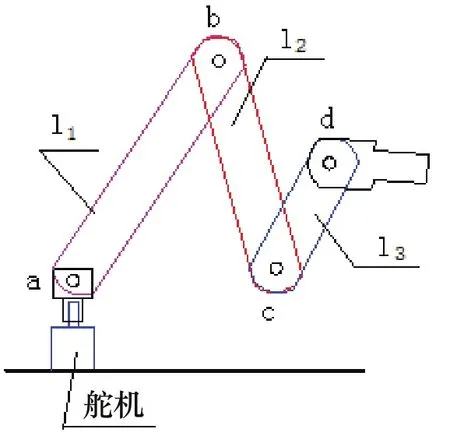
图6 五自由度机械臂结构示意图
舵机与小车车身固定联接,在舵机的驱动下短臂可以带动机械臂完成360的旋转运动。在铰接点a、b、c、d处分别安装四个舵机,实现相邻两机械臂之间的相对转动。通过控制该结构形式的机械臂可以使机械手较为准确地救援,以完成救援任务,救援机械手结构如图7所示。

图7 机械手结构
3 结束语
本文对震后救援机器人结构进行了设计,总结如下:
1)履带轮结构的独特设计可以降低复杂环境对驱动电机的影响,其移动系统具有良好的越障性能,可以确保救援任务的顺利完成。
2)螺套螺杆变距结构设计使车体可以通过狭窄地形,增强了救援机器人地面通过性能。
3)救援物资储运装置设计成储存和抓取两部分,一次可以运输足够多的物资并在机械手的准确动作下确保救援物资顺利到达被救援对象。
[1] 闫清东,魏丕勇,马越.小型无人地面武器机动平台发展现状和趋势[J]. 机器人,2006,26(4): 373-379.
[2] 王海彬,黄永生,姚丹霖.国外地面军用机器人系统综述[J]. 汽车应用,2005(11):18-20.
[3] 李穗平.军用机器人的发展及其应用[J].电子工程师,2007,33(5):65-66.
[4] Voth D. A new generation of m ilitary robot [J].IEEE Intelligent Systems,2004,19(4):2-5.
[5] 段星光,黄强,李科杰.小型轮履腿复合式机器人设计及运动特性分析[J]. 机械工程学报,2005,41(8):109-114.
[6] 陈淑艳,陈文家.履带式移动机器人研究综述[J].机电工程,2007,24(12):109-1.
猜你喜欢
哈哈画报(2022年5期)2022-07-11
纺织服装周刊(2022年16期)2022-05-11
装备制造技术(2020年4期)2020-12-25
学生天地(2020年1期)2020-08-25
电子制作(2019年13期)2020-01-14
小学科学(学生版)(2019年12期)2020-01-06
消费导刊(2018年10期)2018-08-20
制造技术与机床(2017年8期)2017-11-27
制造技术与机床(2017年4期)2017-06-22
瞭望东方周刊(2016年8期)2016-03-12
