移动传感器网络编队覆盖搜索控制算法
2013-09-28 09:46薛志斌曾建潮胡豁生薛颂东
复杂系统与复杂性科学 2013年3期
薛志斌,曾建潮,胡豁生,薛颂东
(1.青海大学智能系统与控制实验室,西宁 810016;2.太原科技大学复杂系统与计算智能实验室,太原 030024;3.埃塞克斯大学以人为本机器人研究室,埃塞克斯郡科尔切斯特C04 3SQ)
移动传感器网络编队覆盖搜索控制算法
薛志斌1,曾建潮2,胡豁生3,薛颂东2
(1.青海大学智能系统与控制实验室,西宁 810016;2.太原科技大学复杂系统与计算智能实验室,太原 030024;3.埃塞克斯大学以人为本机器人研究室,埃塞克斯郡科尔切斯特C04 3SQ)

受生物群体聚集机理的启发,运用势场理论与牛顿——拉夫逊迭代技术,借助具有碰撞规避功能的有限感知群体动力学模型,实现了动态未知环境下无线传感器网络分布式节点的编队部署及其在执行区域内的编队覆盖搜索,丰富了已有的覆盖搜索控制算法。以尽可能少的工作节点达到了网络的连通性覆盖要求,原理简单,节能性好,实用,仿真结果验证了该算法的有效性。
人工势场;无线传感器网络;有限感知群体;编队;节点部署;覆盖搜索
0 引言
近年来,随着微机电系统(Micro-Elect ro-Mechanism System,MEMS)、无线通信、信息网络与集成电路等技术的迅速发展,新兴的无线传感器网络(Wireless Sensor Networks,WSNs)应运而生,并逐渐成为研究热点,已广泛应用于军事、环境监测和保护、交通运输管理、医疗护理、工业生产、物流控制、空间探索、家庭和商业等领域中,来完成针对各种用途时的多种物理量的测量[1-4]。
无线传感器网络是由部署在监测区域内的、大量的、可协作地感知对象信息的微型传感器节点组成的集数据采集、数据处理、数据传输及信息传递功能于一体的复杂系统,已成为近期国内外网络研究的热点[5-8]。
伴随着WSN的迅速发展,衍生出许多有关WSN的研究领域,WSN的覆盖优化理论和技术就是其中的重要组成部分之一,此类研究的内容包括WSN节点定位[2,9]、WSN网络覆盖控制[10-12]等基本且亟待解决的问题。其中,WSN中网络节点的空间位置分布决定着网络的感知质量、性能和使用寿命。WSN中节点的感知范围是圆形区域,各节点的感知能力有限,只有通过多节点的协作才能完成对感知对象的信息采集;覆盖研究旨在优化网络空间资源,以更好地完成环境感知、信息获取,是实现整个监测任务的基础。就WSN的覆盖控制问题的研究进展而言,绝大多数国内外既得研究成果是针对满足全局感知模型的传统无线传感器网络展开的,而针对随机大规模规则部署的传感器节点的连通性网络覆盖控制的分布式编队算法的既得研究成果的已见报导甚少[13-19]。
为了解决这一覆盖连通性问题,通过引入群智能理论,以群集行为中的涌现机理为基础,借助笔者在前期工作中提出的有限感知群体动力学模型[20],用于设计无线传感器网络的优化覆盖策略,实现了WSN的编队最优覆盖搜索算法。最后,一系列仿真实验验证了该算法的有效性,在保证监测区域内整个网络的连通性覆盖性能的同时,兼顾了网络覆盖质量和网络资源的优化。算法简单、运行速度快,能有效收敛于最优解,降低了网络能耗,为设计更加实用的覆盖控制算法提供了依据。
1 相关工作
1.1 WSN覆盖优化
WSN覆盖优化问题的研究现状是结合不同应用环境的需求,设计、应用切实可行的、合理的覆盖控制策略,使各种资源得到优化分配,是当前无线传感器网络领域的一个研究热点[21]。此类覆盖优化问题依据节点的配置方式可以分为确定性覆盖和随机性覆盖两类子问题;同时,依据WSN的应用属性可将此类覆盖优化问题划分为节能覆盖、栅栏覆盖、连通性覆盖和目标定位覆盖等子问题[17]。
鉴于此,本文的设计目标是实现WSN节点的随机连通性编队覆盖搜索控制。
1.2 虚拟势场法
虚拟势场方法是解决传感器网络覆盖控制问题的典型方法之一。利用虚拟势场方法时,假定节点间存在两种虚拟力:1)斥力,使节点足够稀疏,避免过分密集的节点造成感知重叠区域;2)引力,使节点保持一定的密度,避免过于分离而形成感知盲区。最终利用节点的位置移动优化传感器网络的覆盖性能[22]。
人工虚拟势场最早是由Khatib[23]提出,其基本思想是引入一个称为势场的数值函数来描述机器人空间的几何结构,通过搜索势场的下降方向来完成运动规划[24];并通过把机器人的运动环境假想成某种抽象势场,应用于移动机器人的路径规划中。势场源包含两类:障碍物对应的斥力极和目标对应的引力极。进而设计实现多(或群)机器人的覆盖路径规划算法[25]。
路径规划是机器人研究的一个重要内容。常规的路径规划是指点到点的最优路径规划,其目标是寻找一条从起始点到目标点的无碰撞最优(最短或代价最小)路径。而覆盖任务中的路径规划要求路径能保证机器人遍历整个目标区域,其目的有两个方面:保证遍历每一点达到完全覆盖和尽量避免重复路径提高覆盖效率。多机器人覆盖是指多个机器人协作、快速高效地遍历一个含障区域内的全部自由空间[26]。正是由于移动机器人运动路径规划应用研究的需要,物理学中的场的概念才被引进来描述机器人在空间中的几何结构,引导机器人向目标行进。这些场包括常见的势场,还有距离场以及来自于水力分析的基于流函数的规划算法。国内对后两种算法研究甚少[24]。
在传感器网络路径覆盖计算中,路径轨迹点对传感器节点具有引力,并且在感知半径r范围内,距离越远引力函数值越大,反之越小。当距离为零时,路径轨迹点对传感器节点的引力势函数为零,斥力势函数为无穷大以免发生节点间的碰撞。此时路径轨迹点与传感器节点处于同一位置[25]。
1.3 感知模型
受生物群体聚集行为启发,针对生物群体中个体成员的感知范围是有限的这一事实,文献[20]中提出了一个有限感知群体模型。群内任意个体i的运动方程可以如式(1)形式进行描述:

相应的引力/斥力相互作用函数关系式可描述为

环境的动态变化、局部感知和非线性特性是自然界群集过程中普遍存在的现象,笔者提出的有限感知群体动力学模型确能较好地体现出这些接近于实情的特点[20]。其数值仿真结果表明,群内个体在协调运动过程中个体间可实现碰撞规避而完成相互聚集,收敛性优良。群体中个体成员的相互协调运动促成了群体运动的涌现行为,是个体间的交互作用和个体与所处环境间相互作用的结果[27]。上述结论有助于将该模型应用于大规模智能群体系统和WSN节点的分布式协调控制中进行推广并验证其实用性。
2 覆盖数学模型
2.1 节点部署
所谓节点部署,即通过一定的算法布置网络节点,优化现有的网络资源。通常,选用的网络节点部署方法需要在完成监测任务的前提下,尽量节省能耗以延长网络寿命[7]。
笔者的目标是就节点不规则部署的WSN覆盖模型展开讨论;并假定,在可移动节点执行的监测区域内,其初始空间位置随机分布。通过借助运算规则重新配置节点,以最大化覆盖范围[21]。
借鉴文献[28]的研究思路,文中引入虚拟势场和虚拟力概念,提出了一种基于节点可移动假设的编队覆盖搜索算法,促使节点遵循“近则排斥,远则吸引”[27]的相互作用原则,达成任意几何形状编队部署,并在尽力提高覆盖程度和覆盖效率的前提下,有效节约能耗、延长网络使用寿命。
区域覆盖要求工作节点的传感范围完全覆盖整个区域,即区域中的任意一点能够至少被一个工作节点覆盖。文中运用虚拟力算法理论,实时计算出各节点所受的合力,并将相应节点移动到适当的位置,促成整个监测区域内节点的均匀部署[16]。显然,该理论与文献[20]的建模思路是一致的,进而验证了笔者拟定的研究方案是可行的。
2.2 节点覆盖系统模型
不妨设监测区域Acov为二维欧式空间(平面),在该区域上投放参数相同的传感器节点数目为M,每个节点的坐标均已知,且感知半径均为r,通信半径均为R。为了保证网络连通性并兼顾无线干扰,设置通信半径R为感知半径r的两倍,即R=2r[29]。为简化问题分析,对传感器节点做了6点假设[4]:1)探测区域内所有节点处于同一个二维平面内,且将整个目标区域视为一个凸区域;2)探测区域内节点为同构节点,即每个节点具有相同的传感半径r,节点的传感覆盖范围是以r为半径的圆,传感覆盖面积是πr2;3)节点感知半径r与节点无线通信半径R满足R≥2r,以确保网络中覆盖即全连通;4)πr2≪Acov的面积;5)所有节点同构,即感知半径与通信半径分别相同;6)节点能通过测量或定位方法获得其具体位置。
目前提出的无线传感器网络覆盖模型大都基于以下假设:每个节点能对其周围环境进行全方向探测,其覆盖范围是一个以节点为圆心,以节点感知距离为半径的圆形区域;区域内所有节点的探测半径均相等;监测区域所有传感器节点都在同一个平面内[21];研究发现,当通信半径达到探测半径的2倍以上时,全覆盖即保证了全连通。从而该问题可简化为最小区域覆盖问题,即如何使用最少的活跃节点保证对目标区域的全覆盖[30]。
2.3 网络的连通性保持
传感器网络节点部署以后,就要尽量保证网络的连通性。鉴于在第2.2小节中的分析,可归纳出网络保持连通的充分条件是:节点通信半径R满足R≥2r,即要求通信半径R达到感知半径r的2倍以上。
3 网络的编队覆盖连通性
3.1 节点的编队部署
编队概念的首次探究源于1980年的多个同步卫星簇的轨道共享问题[27,31]。工程中编队行为控制可被视为一个分布式控制问题,于是像李亚普诺夫等系统的稳定性分析理论可被有效利用进而去分析群体系统的编队导航特征及其编队集结行进控制[27,32]。若多个体之间的通信采用通过传感器互相感知来交流信息的方式,则编队现象可被理解为多个体系统通过各种方式的传感或通信技术(基于信息融合)的个体间相互作用的结果。
已出现的有关编队的分布式控制方式本质上属于人工势场法,且该法易于实际应用。分布式控制方式对多个个体、障碍和渴望得到的编队形式的凸多边形的顶点施于不同的虚拟力,多个虚拟力的组合促成了群体中每个个体沿着各自的运动轨迹行进,从而达到预期的几何形状编队位置的各自应该占据的实际局部极小的专属空间顶点位置,结果使得群内个体的最终聚集形式是形成一个特殊的预先定义的几何学的外形结构,结构的定义可通过一组渴望获得的交互的智能体间的距离值来表示。
在实际工程应用中,群体中的一族自治的个体被要求沿着预先制定的参考轨迹而维持一个渴望的空间几何图形行进。与传统的行进方式相比,以编队形式行进有很多有利条件,例如,它可缩减系统的成本、增强系统的鲁棒性和有效性,同时兼顾容错性,可装配性和系统结构的柔性。编队控制已得以广泛应用,例如,WSN的覆盖优化问题,这是单个智能体所无法完成的工作。群体编队行为控制的研究工作还有助于人们更好地理解昆虫群体和鸟群等自然界中若干生物群体的社会群居涌现行为[27,33]。
文中对智能群体的编队行为进行控制时采用局部优化取代传统的全局优化的策略。于是,每一个体在任一时刻的位置、速度信息可由迭代计算得出[27]。从而任一群内个体在每一采样时刻均可利用自己的和同伴的位置、速度信息不断更新得出自己在下一采样时刻来临之前应该达到的空间位置和所需的运动速度,进行每一步长内的空间位置更新(即运动)[27]。
针对头脑中业已形成的这一研究目标,在定义群体的目标集时,认为每一群内个体为该集合中相应的一个点集元素,而该元素相应的位置、速度信息可用群体中的任意一个智能个体与其它个体间(发生交互作用的)预期保持的空间距离值来表征。在此情形下,需要注意的是群内个体每运动一个步长的时间即会引起下一采样时刻个体元素的位置、速度信息的变化,因此目标集是时变的且需要不断更新方能保证预期控制目标的实现。而其控制目标经由群内任一个体与其它个体成员间保持渴望的距离值来最终达成渴望的编队形式得以实现。因此,牛顿迭代法可用于WSN的节点等不同类型智能群体的编队控制。
在这一小节,将运用人工势场、牛顿 -拉夫逊迭代更新规则等技术来数值仿真分析大规模智能群体系统如何在形成近似的任意简单凸多边形编队过程中保持编队的稳定性。
计算群内个体i下一时刻空间位置的“牛顿 -拉夫逊”迭代公式为

其中,λ>0,为设计者对群内个体设定的步幅增益值;ΔXi(k)为确定个体运动方向的单位运动步长矢量[32]。
相应的仿真结果如图1所示。
图1表明了渴望的几何形式编队结构中任意两个WSN节点间的边角关系,其中黑球代表个体的最终收敛位置,Vi,i=1,…,M各自代表WSN中不同的节点构成预期形式的凸多边形时各个节点应占据的空间位置。
图2中,多边形各顶点之间的连线用“﹒”线表示;多边形的顶点位置用“。”表示,表明了WSN在进行可移动节点重新配置后经由数值仿真实验得出的收敛终态时刻各个节点应占据的空间局部极小值位置分布点。
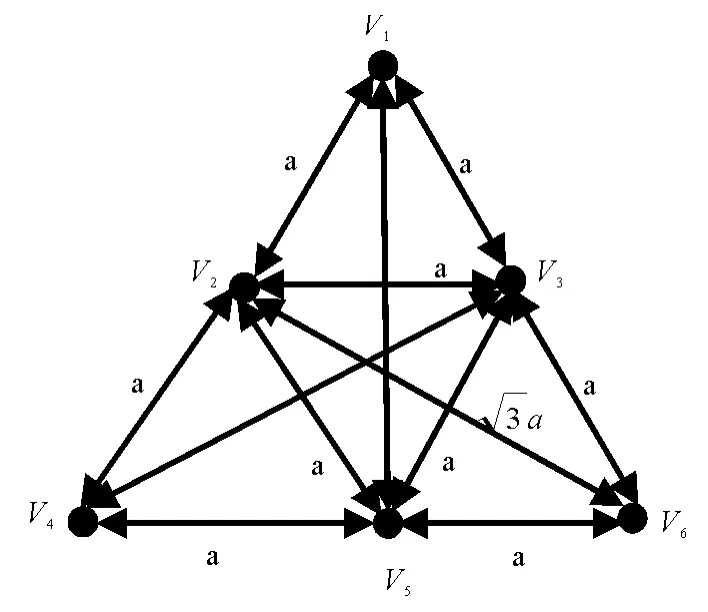
图1 6个传感器节点的预期等边三角形编队结构Fig.1 The ideal formation configuration of six sensor nodes
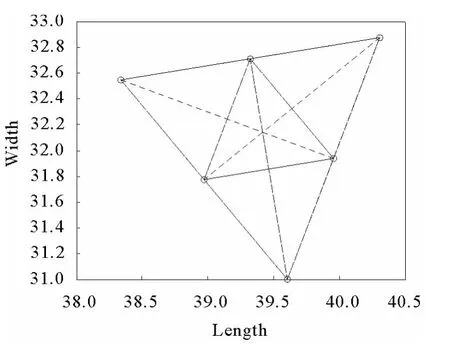
图2 收敛终态时刻6个传感器节点的空间分布Fig.2 Congregated positions distribution of six sensor nodes
由上述仿真结果可见,WSN的节点在形成任意近似的简单凸多边形几何形式编队时保持稳定性的性能优良。
3.2 网络节点的编队覆盖搜索
3.2.1 算法仿真示例
在WSN中,假设每个节点的传感范围为圆,而且网络中各个节点的传感范围相同。这样,网络对监测区域的覆盖可抽象成圆覆盖问题,即用若干数量的等半径的圆来覆盖某固定区域。节点的覆盖区域可以重叠,以达到完全覆盖被监测区域的要求。从节约网络能量、延长网络寿命的角度考虑,要用最少的圆最大程度地覆盖某固定区域。这里假设被覆盖区域无限大,不考虑边界的影响,在保证完全覆盖的要求下节约能量就是使得覆盖效率最大[7]。
为检验该区域覆盖算法在目标的检测与移动搜索方面的连通性能,给出WSN编队覆盖搜索的仿真结果示例。图3中,“*”表示随机部署的各WSN节点的初始位置,“。”表示其收敛终态位置,“﹒”表征各节点形成预期编队形式的动态行进路径轨迹。图4中,“﹒”表征传感器的节点及每个圆的圆心,“-﹒”线圆表征以r为传感半径的辐射圆。
上述仿真结果表明,只要适当选取合理的节点参数值即感知半径r,就能保证使WSN的节点保持对目标区域的全连通和全覆盖。
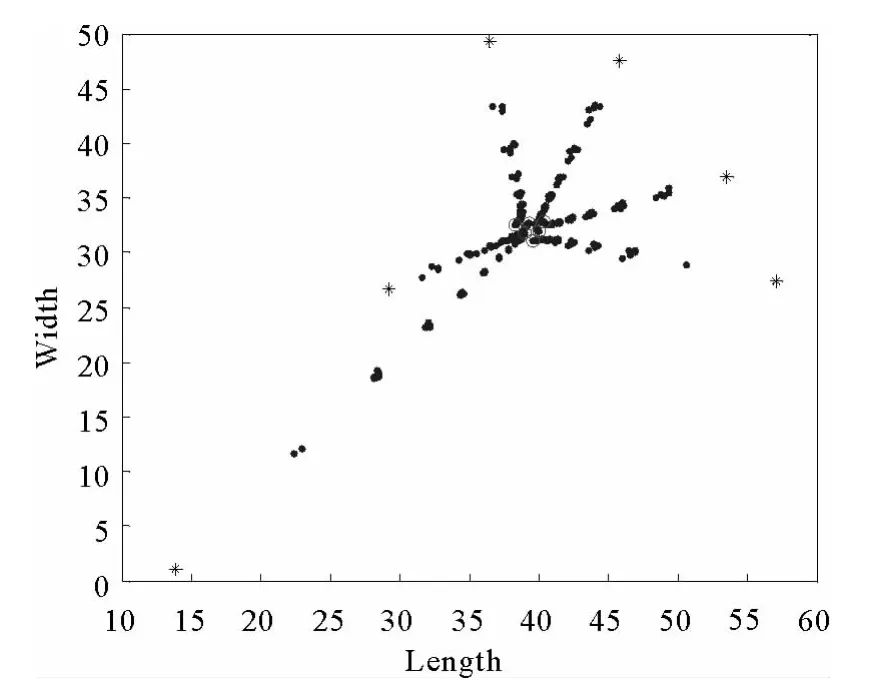
图3 6个传感器节点实时动态编队收敛轨迹路径Fig.3 Convergent trajectories paths of six sensor nodes
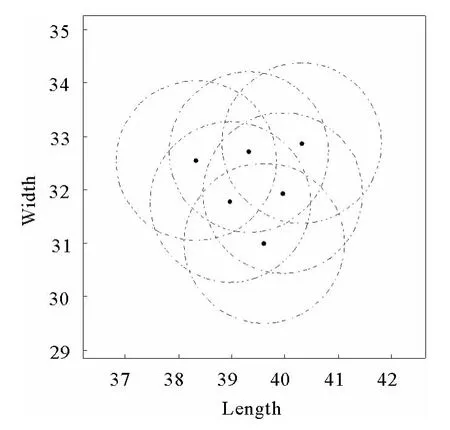
图4 6个传感器节点动态编队覆盖搜索效果演示Fig.4 Formation coverage search capabilities of six sensor nodes
3.2.2 仿真分析
以上仿真结果表明在执行区域内WSN中的各节点在交互协作、协调运动覆盖搜索过程中均能以有效的动态编队行进形式达到全连通、全覆盖,达到了预期效果。移动传感器网络的编队覆盖搜索属于路径规划算法的研究范畴,而路径规划算法是多个体系统覆盖研究的核心内容,其研究目的均是为了方便进行路径规划,以期达到较好的覆盖效果。同时,可以把覆盖看成是一类WSN对目标环境进行无遗漏的完全搜索过程。
4 结语
文中,首先,诠释了WSN的覆盖问题与连通问题间的内在联系;接着,从理论上分析了所提引入“虚拟力”的WSN可移动节点的编队覆盖搜索控制算法的可行性;最后,运用牛顿-拉夫逊迭代技术仿真验证了该算法的有效性,丰富了WSN覆盖理论的既有研究内容。
[1]Akyildiz I F,Su W,Sankarasubramaniam Y,et al.Wireless sensor networks:a survey[J].Computer Networks:The International Journal of Computer and Telecommunications Networking,2002,38(4):393-422.
[2]任彦,王博,张思东.动态无线传感器网络基础设施建模方法及分析[J].铁道学报,2009,31(2):54-58.
Ren Yan,Wang Bo,Zhang Sidong.Modeling and analyzing of dynamic wireless sensor network infrastructures[J].Journal of the China Railway Society,2009,31(2):54-58.
[3]田莹,张淑芳,王莹.无线传感器网络分布式概率覆盖保持协议[J].通信学报,2009,30(1):70-75.
Tian Ying,Zhang Shufang,Wang Ying.Distributed probabilistic coverage-preserving configuration protocol for wireless sensor network[J].Journal on Communications,2009,30(1):70-75.
[4]赵国炳,陈国定,张奇伟.一种无线传感器网络覆盖优化方法[J].机电工程,2009,26(6):80-82.
Zhao Guobing,Chen Guoding,Zhang Qiwei.Coverage optimization of wireless sensor network[J].Mechanical &Electrical Engineering Magazine,2009,26(6):80-82.
[5]孙利明,李建中,陈渝.无线传感器网络[M].北京:清华大学出版社,2005:3-26.
[6]李晓维,徐勇军,任丰原.无线传感器网络技术[M].北京:北京理工大学出版社,2007:10-32.
[7]曹峰,刘丽萍,王智.能量有效的无线传感器网络部署[J].信息与控制,2006,35(2):147-153.
Cao Feng,Liu Liping,Wang Zhi.A new energy-efficient WSN deployment algorithm [J].Information and Control,2006,35(2):147-153.
[8]于海斌,曾鹏,王忠锋,等.分布式无线传感器网络通信协议研究[J].通信学报,2004,25(10):102-110.
Yu Haibin,Zeng Peng,Wang Zhongfeng,et al.Study of communication protocol of distributed sensor network[J].Journal of China Institute of Communications,2004,25(10):102-110.
[9]李建峰,程咏梅.无线传感器网络的研究与发展[J].微处理机,2008,30(5):48-50.
Li Jianfeng,Cheng Yongmei.The research and development of wireless sensor networks[J].Microprocessors,2008,30(5):48-50.
[10]Zhang H,Hou J C.Maintaining sensing coverage and connectivity in large sensor networks[R].University of Illinois at Urbana Champaign UIUC Computer Science Technical Report,2003,UIUCDCS-R:23-51.
[11]林祝亮,冯远静,俞立.无线传感网络覆盖的粒子进化优化策略研究[J].传感技术学报,2009,22(6):873-877.
Lin Zhuliang,Feng Yuanjing,Yu Li.Research on the strategy of wireless sensor networks coverage by the particle optimization evolutionary[J].Chinese Journal of Sensors and Actuators,2009,22(6):873-877.
[12]王燕莉,安世全.无线传感器网络的覆盖问题研究[J].传感技术学报,2005,18(2):307-312.
Wang Yanli,An Shiquan.Research on the coverage of wireless sensor network[J].Chinese Journal of Sensors and Actuators,2005,18(2):307-312.
[13]陶丹,孙岩,陈后金.视频传感器网络中最坏情况覆盖检测与修补算法[J].电子学报,2009,37(10):2284-2290.
Tao Dan,Sun Yan,Chen Houjin.Worst-case coverage detection and repair algorithm for video sensor networks[J].Acta Electronica Sinica,2009,37(10):2284-2290.
[14]马华东,陶丹.多媒体传感器网络及其研究发展[J].软件学报,2006,17(9):2013-2028.
Ma Huadong,Tao Dan.Multimedia sensor network and its research progresses[J].Journal of Software,2006,17(9):2013-2028.
[15]Wang B.A survey on coverage problem in wireless sensor networks[R].ECE Technical Report,ECE Dept,National U-niversity of Singapore,2006.
[16]刘丽萍,李桂丹,王智,等.无线传感器网络多重覆盖算法[J].天津大学学报,2009,42(4):311-315.
Liu Liping,Li Guidan,Wang Zhi,et al.A weighted multiple coverage algorithm in wireless sensor networks[J].Journal of Tianjin University,2009,42(4):311-315.
[17]任彦,张思东,张宏科.无线传感器网络中覆盖控制理论与算法[J].软件学报,2006,17(3):422-433.
Ren Yan,Zhang Sidong,Zhang Hongke.Theories and algorithms of coverage control for wireless sensor networks[J].Journal of Software,2006,17(3):422-433.
[18]陶丹,马华东,刘亮.基于虚拟势场的有向传感器网络覆盖增强算法[J].软件学报,2007,18(5):1152-1163.
Tao Dan,Ma Huadong,Liu Liang.A virtual potential field based coverage-enhancing algorithm for directional sensor networks[J].Journal of Software,2007,18(5):1152-1163.
[19]郭怡婷,王俊年.无线传感器网络中基于微粒群算法的优化覆盖机制[J].计算机与现代化,2009,25(6):1-4.
Guo Yiting,Wang Junnian.Optimal coverage mechanism based on PSO algorithm in wireless sensor networks[J].Computer and Modernization,2009,25(6):1-4.
[20]薛志斌,曾建潮.有限感知群体的动力学仿真建模与分析[J].系统仿真学报,2009,21(20):6352-6355.
Xue Zhibing,Zeng Jianchao.Simulation modeling and analysis of dynamics of range limit perceived group[J].Journal of System Simulation,2009,21(20):6352-6355.
[21]朱寅寅.无线传感器网络覆盖优化方法研究[D].南京:南京理工大学,2009:2-17.
Zhu Yinyin.Research on coverage optimization method of wireless sensor network[D].Nanjing:Nanjing University of Science and Technology,2009:2-17.
[22]陶丹,马华东,刘亮.视频传感器网络中路径覆盖增强算法研究[J].电子学报,2008,36(7):1291-1296.
Tao Dan,Ma Huadong,Liu Liang.Study on path coverage enhancement algorithm for video sensor networks[J].Acta Electronica Sinica,2008,36(7):1291-1296.
[23]Khatib O.Real-time obstacle avoidance for manipulators and mobile robots[J].The International Journal of Robotics Research,1986,5(1):90-98.
[24]刘华军,杨静宇,陆建峰,等.移动机器人运动规划研究综述[J].中国工程科学,2006,8(1):85-94.
Liu Huajun,Yang Jingyu,Lu Jianfeng,et al.Research on mobile robots motion planning:a survey[J].Engineering Sci-ence,2006,8(1):85-94.
[25]肖甫,王汝传,叶晓国,等.基于改进势场的有向传感器网络路径覆盖增强算法[J].计算机研究与发展,2009,46(12):2126-2133.
Xiao Fu,Wang Ruchuan,Ye Xiaoguo,et al.A path coverage-enhancing algorithm for directional sensor network based on improved potential field[J].Journal of Computer Research and Development,2009,46(12):2126-2133.
[26]崔益安.多机器人协同覆盖技术研究[D].长沙:中南大学,2008:3-71.
Cui Yi′an.Research on multi-robot coverage based on cooperation[D].Changsha:Central South University,2008:3-71.
[27]曾建潮,薛志斌.智能群体的微分动力模型描述与仿真[J].系统仿真技术及其应用,2010,12(1):176-181.
Zeng Jianchao,Xue Zhibing.Differential dynamic model description and simulation of intelligent swarm:a survey[J].System Simulation Technology and Application,2010,12(1):176-181.
[28]Howard A,Mataric M J,Sukhatme G S.Mobile sensor network deployment using potential fields:a distributed,scalable solution to tile area coverage problem [C]//The 6th International Conference on Distributed Autonomous Robotic System(DARS02).Tokyo:Springer-Verlag Press,2002:299-308.
[29]林祝亮,冯远静.基于粒子群算法的无线传感网络覆盖优化策略[J].计算机仿真,2009,26(4):190-193.
Lin Zhuliang,Feng Yuanjing.Optimization strategy of wireless sensor networks coverage based on particle swarm algorithm [J].Computer Simulation,2009,26(4):190-193.
[30]Zhang H,Hou J C.Maintaining sensing coverage and connectivity in large sensor networks[J].Ad Hoc and Sensor Wireless Networks,2005,1(1/2):89-124.
[31]Walker J G.The geometry of cluster orbits[J].J Brit Interplan Soc,1982,35(1):345-345.
[32]Chen X,Li Y M.Smooth formation navigation of multiple mobile robots for avoiding moving obstacles[J].International Journal of Control,Automation,and System,2006,4(4):466-479.
[33]Chen Y Q,Wang Z M.Formation control:a review and a new consideration[C]//IEEE/RSJ,International Conference on Intelligent Robots and Systems(IROS 2005).Alberta:IEEE Press,2005:3181-3186.
Mobile Sensor Network Formation Coverage Search Control Algorithm
XUE Zhi-bin1,ZENG Jian-chao2,HU Huo-sheng2,XUE Song-dong2
(1.Intelligence System and Control Laboratory,Qinghai University,Xining 810016,China;2.Complex System and Computational Intelligence Laboratory,Taiyuan University of Science and Technology,Taiyuan 030024,China;3.Human Centred Robotics Research Laboratory,University of Essex,Colchester Essex C04 3SQ,UK)
Based on the inspiration to the potential interior operational principle of aggregation from biology,by using artificial potential functions namely APF and Newton-Raphson iteration update rule techniques,by means of the range limit perceived swarm dynamic model with collision-free function,thus realized the automatic distributed sensor node formation deployment problem in wireless sensor networks namely WSN in dynamic unknown environment and the sensor node formation coverage search within the implementation region,further enriched existing coverage search control algorithm.While the requirement of both the network coverage and connectivity is satisfied with the fewest possible sensor working nodes.The algorithm has plain principle,energy saving,and practical.The simulation results have validated its effectiveness.
artificial potential field(APF);wireless sensor network(WSN);range limit perceived group;formation;deployment;coverage search
TP393
A
1672-3813(2013)03-0037-08
2012-12-04
国家自然科学基金(61165016,60975074);教育部“春晖计划”合作科研项目(Z2009-1-81003);青海大学高层次人才项目(2012-QGC-10);山西省自然科学基金项目(2013011019-4);太原科技大学同洲电子科技创新基金项目(TZ201304)
薛志斌(1966-),男,陕西清涧人,博士,教授,主要研究方向为复杂系统建模与仿真、无线传感器网络部署、群智能等。
(责任编辑 耿金花)
猜你喜欢
军事文摘(2023年5期)2023-03-27
北京航空航天大学学报(2021年4期)2021-11-24
高技术通讯(2021年5期)2021-07-16
制造技术与机床(2019年6期)2019-06-25
石油地球物理勘探(2017年4期)2017-12-18
北京航空航天大学学报(2017年3期)2017-11-23
华东师范大学学报(自然科学版)(2017年1期)2017-02-27
系统工程与电子技术(2016年4期)2016-08-24
中国海上油气(2015年3期)2015-07-01
海军航空大学学报(2015年4期)2015-02-27