轴对称矢量喷管执行机构协同控制方案设计
2013-09-28 09:39:06周文祥周永权杨征山
航空发动机 2013年1期
陈 杰,周文祥,周永权,杨征山
(1.中航工业航空动力控制系统研究所,江苏无锡 214063;2.南京航空航天大学能源与动力学院,南京 210016)
0 引言
轴对称矢量喷管(AVEN)控制技术是当今世界最先进战斗机采用的典型矢量推力控制技术之一,通过控制矢量喷管的偏转来改变发动机尾喷流的方向,使战斗机具备过失速机动及短距起降的能力[1-2]。典型AVEN尾喷管出口(简称A9)矢量控制由3个作动筒驱动。作动筒输出相同位移实现A9收扩调节;输出不同位移实现偏转调节。AVEN控制系统控制回路分为内环和外环,内环即执行机构位移控制回路,或称小闭环控制回路,实现作动筒的位移量闭环控制,外环根据飞行控制系统输出的矢量方位角θ和矢量偏转角δ,由控制律解算出3个作动筒位移给定量,然后通过执行机构小闭环回路控制作动筒运动,实现A9面积调节和矢量偏转控制。
本文在AVEN执行机构小闭环控制回路设计的基础上,研究AVEN调节机构外环协同控制方案,实现AVEN矢量控制。
1 AVEN执行机构回路独立控制方案
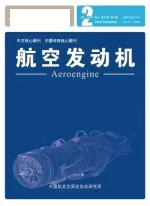
典型的AVEN结构如图1所示[3]。因θ和δ不能由传感器测得,A9外环控制通常采用开环控制方式,并以3个作动筒平均控制精度近似AVEN控制精度,初步方案如图2所示,3个执行机构小闭环回路独立控制。在图中:L1(或L2、L3)为执行机构回路序号或作动筒反馈位移;L1Dem为位移给定量;LVDT为线位移传感器;A8为发动机喷管喉道面积。通常3个小闭环回路组件控制系统结构完全相同。
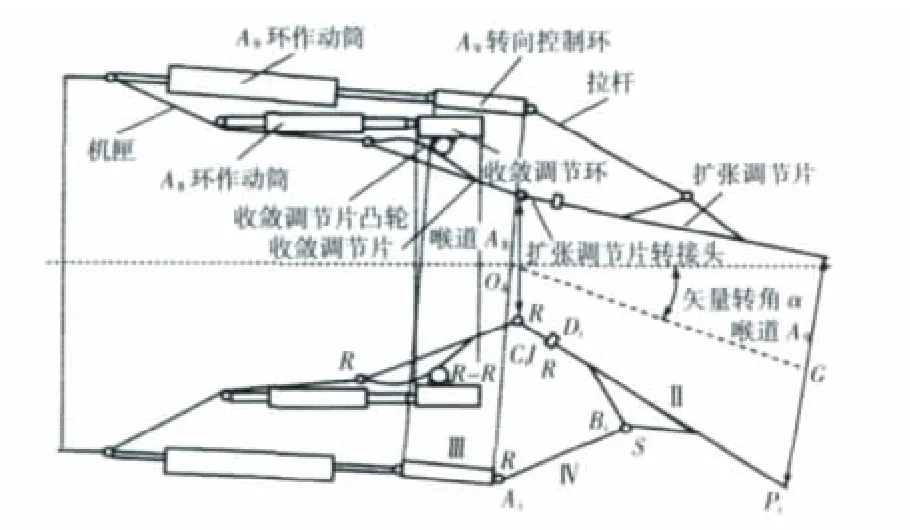
图1 典型AVEN装置结构
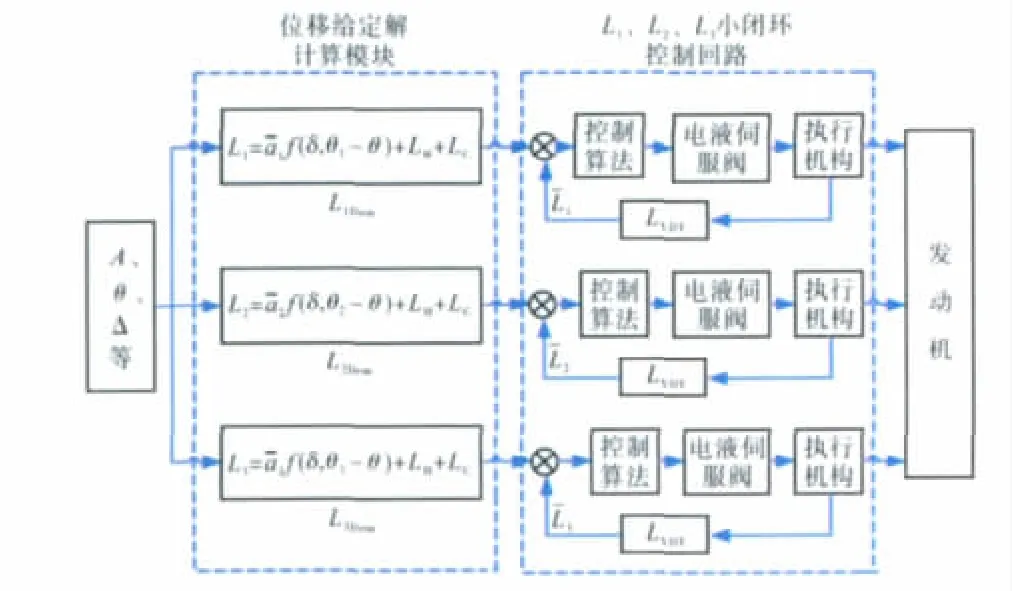
图2 矢量喷管调节初步控制律方案
AVEN独立控制方案进行了数字仿真验证。θ和δ阶跃给定(0°、0°)、(270°、20°)、(0°、0°)。仿真结果如图3 所示。L1、L2、L3位移变化量分别为 18.5%、6%、28%,调节时间分别为0.30、0.13、0.40 s,作动筒位移调节出现逐个到位现象。若θ和δ为斜坡给定,若是低斜率斜坡,3个矢量作动筒控制较好;若是高斜率斜坡,仿真结果类似阶跃也出现作动筒到位不等时的现象。
图3 矢量喷管偏转仿真曲线
飞机在机动飞行时会给出大幅度快速偏转指令,近似阶跃信号或高斜率斜坡;矢量喷管偏转角及偏转速率均会很大,快速率大幅度偏转可能会造成发动机工作不稳定;如果喷管矢量控制不理想,如出现上述台阶式运动,对发动机安全工作更为不利[4]。SU-37飞机矢量偏转速率达到 45°/s[5-6],δ=20°时,偏转在 0.5 s内完成;本文研究的矢量控制装置按以上控制方案θ=0°、δ=0~20°阶跃给出,通过仿真发现,3个作动筒上升时间最快为0.35 s,最慢为0.65 s,矢量喷管可能出现台阶式运动。随着矢量喷管技术进一步发展,δ进一步加大,采用常规的独立控制方案会使A9作动筒台阶式运动更明显。为此,必须保证给定任意θ和δ时,控制系统才能使3个作动筒同时运动到位,以保证发动机工作安全。
2 AVEN执行机构协同控制方案
2.1 同步控制方法
为解决矢量喷管作动筒等时运动到位问题,可以参考同步控制理论设计AVEN执行机构协同控制方案。最常见的同步控制是位置同步与转速同步控制等。同步控制方式[7]有并行、主从、交叉耦合[8]、虚拟总轴[9]和偏差耦合控制等。其中,主从控制是将其中某个执行机构控制回路作为主回路,其输出值作为其余回路的参考。双回路主从控制原理如图4所示。偏差耦合控制是将某一分回路执行机构的反馈同其它回路执行机构回路反馈分别作差,然后将得到的偏差相加,作为该回路执行机构的补偿信号。这种控制可以很好地实现同步性,并且稳态和瞬态同步精度均较高。3回路偏差耦合控制原理如图5所示。
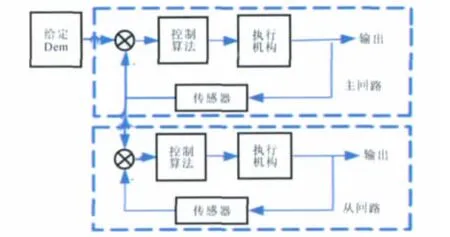
图4 主从控制原理
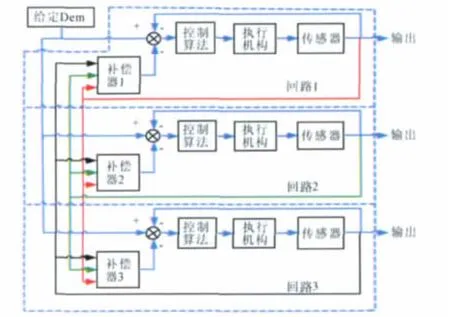
图5 偏差耦合控制方案原理
2.2 AVEN执行机构协同控制方案设计及仿真验证
显然,前述同步控制理论不能直接应用于AVEN矢量喷管控制。AVEN矢量喷管等时运动控制要求在给定任意θ和δ时作动筒等时运动到位,亦可理解为“运动时间同步”,本文定义该同步控制为“协同控制”。AVEN执行机构回路协同控制方案可融合偏差耦合控制和主从控制的特点进行设计。
(1)基于偏差比例的变偏差给定协同控制方案
基于偏差比例的变偏差给定协同控制原理如图6所示,该控制是指3个作动筒控制回路各自计算给定信号与反馈信号的偏差(下文简称偏差),将3个回路原始偏差信号绝对值最大的回路作为主回路;其它回路偏差按与最大偏差的比例进行比例缩减,即综合耦合矫正,矫正后偏差经过相同的控制器运算后,得到与偏差成反比的电液伺服阀控制电流,3个矢量作动筒由此实现变速运动,调节时间相等且由主回路确定。当某回路偏差接近零时,由于存在偏差比例,相关比例系数会急剧放大,导致稳态控制精度变差,所以需对偏差耦合器控制进行限制,视时自动退出耦合控制。
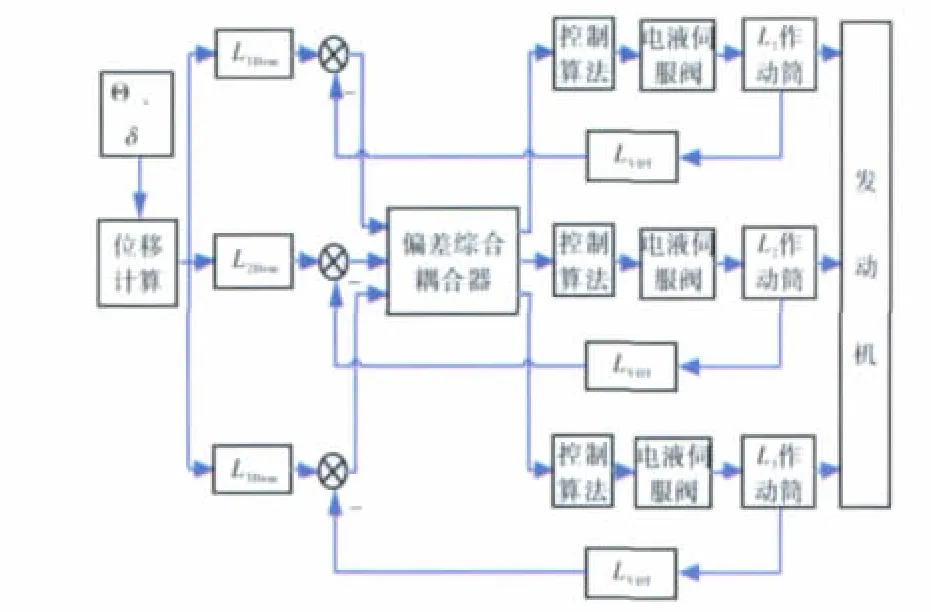
图6 基于偏差比例的变偏差协同控制原理
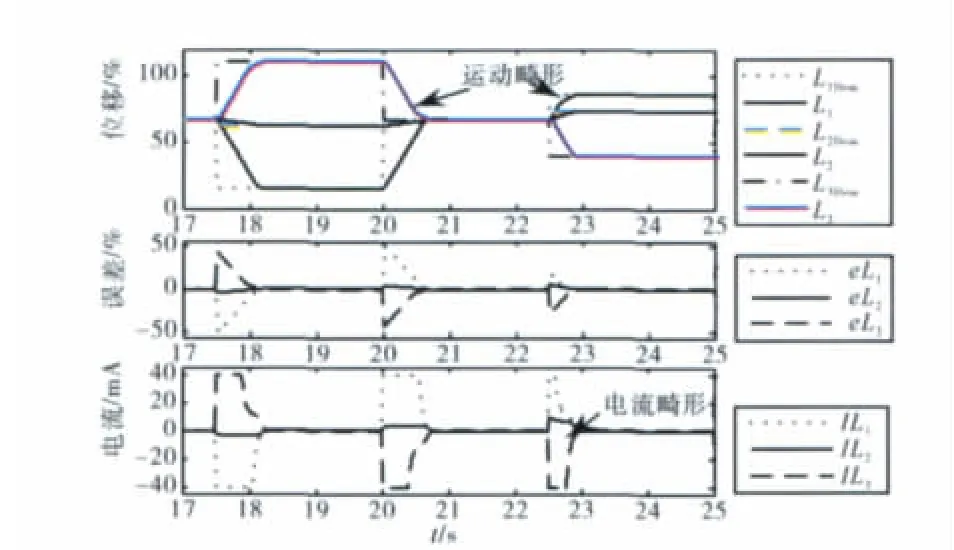
图7 矢量偏转作动筒运动异常曲线
采用该方案进行与独立控制方案相同内容的仿真,结果如7所示。该协同控制基本实现了AVEN作动筒协同控制。但是当偏差耦合器输出矫正偏差很大时,电液伺服阀实际电流会达饱和值(+40 mA或-40 mA),作动筒运动速度达到极限,会使差耦合器工作失效;当输出电流由饱和转变为非饱和时,其余回路电流输出容易发生突变,由此会引发3个作动筒运动畸形。
(2)基于偏差比例的变电流协同控制方案
针对电液伺服阀输出电流畸形,提出了基于偏差比例的变电流协同控制方案。运用3个作动筒的给定值、反馈值及其信号偏差,对执行机构回路进行综合耦合,并得到矫正系数;控制器根据偏差信号计算电液伺服阀初步给定电流,再根据矫正系数调制出实际给定电流,从而控制3个作动筒变速运动。在3个回路中,将原始偏差信号绝对值最大的1个回路作为主回路,其余为从回路,控制逻辑如图8所示。
采用该方案进行相同内容的仿真,如图9所示。结果表明,该方案较好地实现了协同控制,保留了前1种方案的优点,对小闭环控制器控制系数不限制,作动筒的畸形运动不再出现。

图9 方案2作动筒运动曲线
采用该方案进行斜坡响应仿真,给定θ=75°,δ=0~20°/0.1 s斜坡信号,仿真结果如图10所示。即使在电液伺服阀输出电流饱和的大斜率斜坡给定下,3个作动筒运动仍保持较好的协同性。

图10 20°/0.1 s偏转斜坡跟踪仿真曲线
以上设计和仿真结果表明:基于偏差比例的变电流协同控制较好地实现了AVEN作动筒等时同步控制,该系统控制精度较高,易于工程实现,是AVEN执行机构控制回路外环控制的首选方案。
3 AVEN执行机构协同控制半物理试验与分析
3.1 半物理试验
矢量偏转半物理试验分别采用独立控制方案和基于偏差比例的变电流协同控制方案[10],试验范围在θ=0°和 θ=180°,δ=0~10°。当 AVEN以该方位角做偏转时,作动筒L1和L3位移均相同,为了使图清晰可辨,在试验曲线中仅给出L1的试验结果。
独立控制方案试验结果如图11(a)所示。图中VnaSelta=θ,VnaDelta=δ。2 种结果一样出现时间不同步现象,图中(0°,5°)到(180°,10°)阶段,L1、L2调节时间分别是 0.3、0.6 s。
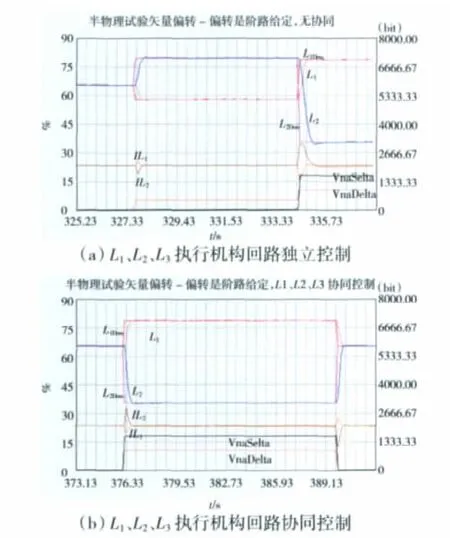
图11 偏转角阶跃给定AVEN偏转控制试验结果
L1、L2、L3回路采用基于偏差比例的变电流协同控制方案进行试验,(θ、δ) 阶跃给定(0°、0°)、(180°、10°)、(0°、0°),结果如图 11(b)所示,3 个作动筒等时同步运动。
3.2 试验结果分析
AVEN控制采用协同控制方案,通过全数字仿真和半物理试验,获得的部分试验结果见表1。

表1 试验结果综合对比
根据理论分析,采用协同控制方案后,只改变原有系统的动态控制品质,对稳态控制精度影响不大。从表1中可见,全数字仿真结果与半物理试验结果非常接近,但精度有小差异,原因可能是:(1)半物理试验数据受上位机采集精度的影响;(2)A8控制稳定性会对A9产生直接影响。综合来看,半物理试验控制品质比全数字仿真的稍差,但二者偏差很小。
4 结论
(1)针对矢量喷管控制过程中出现的作动筒非等时同步运动问题,设计了2种AVEN执行机构协同控制方案,经过仿真分析和对比验证,确立了AVEN执行机构回路宜采用基于偏差比例的变电流协同控制方案。
(2)通过全数字仿真和半物理试验对基于偏差比例的AVEN执行机构变电流协同控制方案进行测试及验证,结果表明:该方案能够实现航空发动机AVEN的收扩与偏转控制,解决了AVEN在给定任意θ和δ时执行机构的非等时同步运动问题,矢量喷管偏转具有稳定、安全、快速、精度高等优点。
[1]群力.推力矢量在战斗机上的应用 [J].国际航空,1999(1):20-23.QUN Li.Application of thrustvectoring on fighter[J].International Aviation,1999(1):20-23.(in Chinese)
[2]王贝,袁茹,王三民.轴对称推力矢量喷管驱动机构的多目标优化设计研究[J].机械科学与技术,2009(9):36-38.WANG Bei,YUAN Ru,WANG Sanmin.Multi-objective optimization for the driving mechanism of an axial-symmetric vectoringexhaust nozzle[J].Mechanical Science and Technology for Aerospace Engineering,2009,(9):36-38.(in Chinese)
[3]王玉新.喷气发动机轴对称推力矢量喷管[M].北京:国防工业出版社,2006:22-25.WANG Yuxin.Axial-symmetric vectoring exhaust nozzle for jet engine[M].Beijing:National Defense Industry Press,2006:22-25.(in Chinese)
[4]丁凯锋,樊思齐.矢量喷管与发动机的共同工作研究[J].航空动力学报,2000,15(1):96-98.DIN Kaifeng,FAN Siqi.Study of thrustvectoring and cooperation ofaerospace engine[J].Journal ofAerospace Power,2000,15(1):96-98.(in Chinese)
[5]Tomas P D.Test of AL-31FU[J].Flight International,2001,21(1):1990-1999.
[6]计秀敏.苏-37的矢量喷管技术[J].国际航空,2000,8:36-38.JI Xiumin.Thrust vectoring technology of SU-37[J].International Aviation,2000,8:36-38.(in Chinese)
[7]杨晨娜.多电机同步控制方式的研究[J].知识经济,2011(12):99-100.YANG Chenna.Control mode study of multi motor synchronous[J].Knowledge Economy,2011(12):99-100.(in Chinese)
[8]Koren Y.Cross-coupled biaxialcomputer controlfor manufaching system[J].ASME Journal of Dynamic Systems Measurement and Control,1980,102(12):1324-1330.
[9]Anderson R G,Lorenz R.Machine coordinated motion control via electronic line-shafting[J].IEEE Transactions on industry applications,2001,37(1):247-254.
[10]刘爱萍,姚华.高推重比发动机全权限数字电子控制系统研制和半物理仿真试验验证 [J].航空发动机,2003,29(1):23-26.LIU Aiping,YAO Hua.Investigation and semi-physical simulation of the FADEC system on a high thrust-weight ratio engine[J].Aeroengine,2003,29(1):23-26.(in Chinese)
猜你喜欢
天然气与石油(2022年5期)2022-11-01 09:03:00
天然气与石油(2022年4期)2022-09-21 07:05:54
现代制造技术与装备(2021年5期)2021-07-02 01:57:30
科学技术创新(2021年11期)2021-05-25 10:04:00
弹箭与制导学报(2020年4期)2020-09-17 06:14:38
制造技术与机床(2017年2期)2017-05-04 04:17:24
机床与液压(2015年4期)2015-05-10 07:49:58
舰船科学技术(2015年8期)2015-02-27 15:38:46
航天返回与遥感(2014年5期)2014-07-31 17:57:09
导航定位与授时(2014年2期)2014-04-27 13:41:08