稀土萃取模糊PID恒压给料流量控制
2013-09-27 09:40逄启寿
湿法冶金 2013年1期
逄启寿,罗 璇
(江西理工大学,江西 赣州 341000)
稀土串级萃取过程中,流量控制是整个分离控制中至关重要的环节,它对稀土萃取产品的质量有直接影响。流量对管道压力有影响,有时会造成管道欠压或过压,影响萃取给料。稀土萃取过程中,介质都具有较强的酸腐蚀性,而且流量变化范围较大。较原始的生产车间常用水车式圆盘戽斗流量控制器,目前,在大型先进稀土萃取车间,往往采用阀门和变频调速来控制流量。
1 稀土萃取给料系统特性曲线分析
稀土萃取过程中,通常运用变频转速法和阀门控制法对流量加以控制。变频转速法是以阀门开度不变,通过变频器改变水泵电机转速来控制流量。图1中,B1、B2、B3为管阻特性曲线,n1、n2、n3分别为不同转速下的扬程特性曲线,K点是给料动平衡点。当改变电机转速,扬程特性曲线由n1移到n2,管阻特性曲线B1不变,流量由Q0减小到Q1,扬程由h2减小到h3,其属于变压变流控制,输出功率为矩形(O,Q1,P,h3)部分,功率为

阀门控制法是使开度管阻特性曲线B1变到B3,管阻特性发生改变,平衡点由K点移到G点,泵的转速保持不变,流量由Q0减小到Q1,扬程由h2增加至h1。流量为Q1处,输出功率为矩形(O,Q1,G,h1)部分,其功率为

通过比较,变频调速流量控制功率远远小于阀门开口流量控制功率,节能效果非常明显。但由于实际生产过程中流量控制变化范围较大,较小流量控制水泵提供的扬程较小,导致管道欠压,不能正常供应料液。为了解决这一问题,将给料系统设计为恒压。图1中,管阻特性曲线流量由Q0减小到Q1时,管阻特性曲线由B1变为B2,保持压力不变,通过调节转速达到稳定点E,其输出功率为

因此,变频调速恒压给料流量控制可以节省的功率为矩形(h1,G,E,h2)围成的面积:

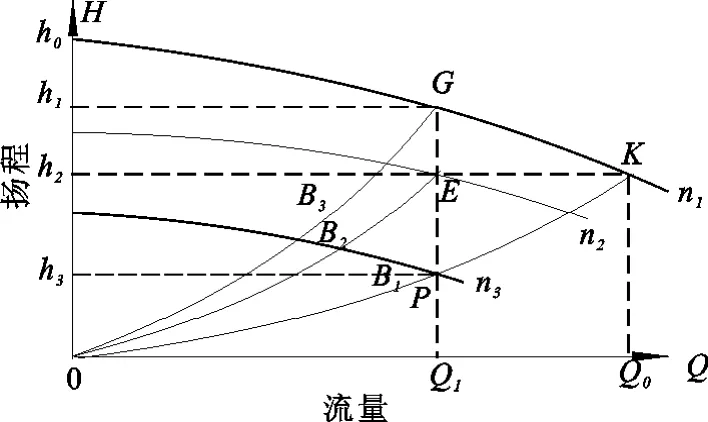
图1 管网及水泵运行特性曲线
2 稀土萃取恒压变频调速给料流程结构
如图2所示,料液从储罐流出,经过泵机再经过数字控制阀。数字控制阀由数字电路控制系统控制阀门开口,根据流量计得到的数据合理控制阀门。泵机直接连接交流变频电源,转速不变。由于萃取过程中流量时刻处在变化之中,通过流量扬程特性曲线分析得知,管阻特性曲线变化时,流量的改变必将影响扬程,进而改变管道口压力;压力的不稳定又会影响给料的正常进行。管道压力过高,会直接影响给料管道使用寿命且浪费能源。稀土萃取料液的酸性较强,一般使用PVC管道运送,而PVC管道的压力承受能力差。当压力太低时,管道处在欠压状态,通常不能把料液顺利送到萃取槽进料口。通过压力传感器测量泵的出口压力,用PLC控制变频器输出频率进而控制电机转速,可以平稳输送料液。

图2 恒压控制流程结构图
3 萃取过程压力控制分析
稀土萃取过程具有非线性、时滞性、强耦合性及时变性,而流量的精准控制往往与压力相关,因此,合理控制压力能够保证精准的流量控制。而压力控制同样是一个非线性、大滞后的控制过程,非常难以控制,且难以建立精确的数学模型。传统的PID参数一经设定就不能自动更改,这给控制精度带来不稳定性,而模糊控制具有较强的自学习能力,能够根据现场环境自动调整输出参数,所以将模糊控制理论与经典的PID控制相结合,并根据稀土萃取过程给料压力的变化,时时调节PID的3个参数。
4 模糊参数自整定PID控制器的设计
模糊参数自整定PID控制器是在经典PID基础上分别对其3个参数Kp、Ki、Kd进行在线整定,使达到对管道压力优化控制。控制原理如图3所示,模糊控制过程由模糊化、模糊控制规则、模糊推理和去模糊化等几个步骤实现。
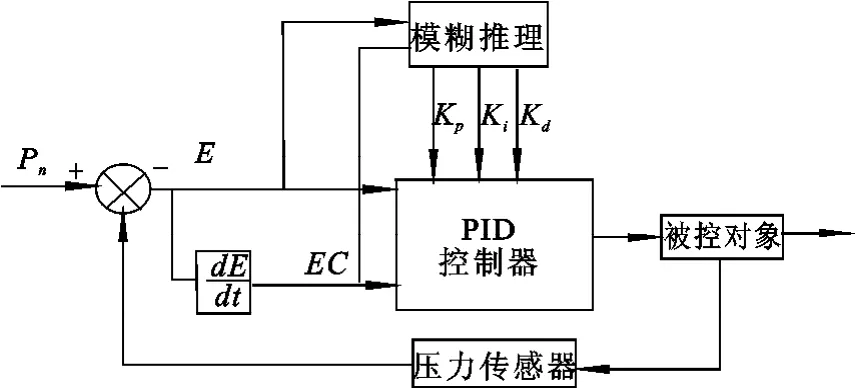
图3 给料压力调节系统模糊自整定PID控制器结构图
4.1 输入输出模糊化
模糊PID控制器输入时,管道压力误差及误差变化率分别为E和EC,输入变量的模糊论域的子集区为 [NB,NM,NS,ZO,PS,PM,PB],论域等级取[-6,6],管道最高压力不超过394 kPa,正常情况下约为376kPa,最低压力约为358 kPa。
模糊输出3个参数分别为Kp、Ki、Kd,应用传统的PID,3个参数取值分别设定为Kp=5.48,Ki=4.98,Kd=1.37。设输出控制参数Kp、Ki、Kd模糊子集都为[负大,负中,负小,零,正小,正中,正大],简记为[NB,NM,NS,ZO,PS,PM,PB]。
4.2 模糊规则的确定
根据经验,建立合理的模糊给料压力PID自调整参数。根据实际测量数据E及EC分别分析如下[1-2]:
1)如果E较大,则误差的绝对值较大,此时不论误差变化趋势如何,都应该考虑控制器的最大输出,应取较大的Kp;为了防止饱和,应取较小的Ki;同时,为了防止微分饱和且出现较大的超调,应该取Kd=0。
2)如果E·EC>0,说明误差朝增大的方向变化。假如E较大,则可以考虑由控制器实施较强的控制效果,使误差绝对值减小,但此时Ki、Kd要适中,不能太大;Ki取较小值,因为E绝对值偏小,控制器实施一部分控制作用,只要改变误差的变化趋势,即可使其朝误差绝对值减小方向变化。
3)如果E·EC<0,说明误差朝减小的方向变化。假如E较大,则应该实施一般的控制,这样可迅速减小误差绝对值,应该取中等Kp,较小的Ki和中等Kd,使系统稳定性和动态性能提高;假如E较小,则为了保持系统稳定性能,应该增大Kp和Ki,同时为了避免系统在稳定值附近震荡,并考虑系统的抗干扰性能,应该取中等Kd。
4.3 反模糊化过程
通过上面推理得到的3个参数是反模糊化的量,必须对其反模糊化得到清晰化的量。通过重心算法对其进行反模糊化,计算公式[3]如下:

由于计算工作量非常大,通常应用MATLAB模糊工具箱把规则输入到工具箱中,计算后可方便地得出结果。
5 恒压供料系统模型的建立及仿真
本课题供料恒压控制系统考虑为滞后一阶惯性环节,对变频器的调节及传感器压力检测等滞后时间忽略不计,其表达式[4]为

式中:k为供料系统的稳定增量,t为时间常数,τ为纯滞后时间。参数的确定通过离线开环阶跃响应法,由控制器输出一个适当的阶跃响应信号,使泵的转动速度提高到一定的幅度,分别记录下料液的压力变化情况,再根据输入输出情况辨别。
通过现场试验得到经验值k=6.8,t=5.7,τ=0.52s,所以给料近似模型为

仿真结果如图4所示。可以看出,模糊参数自整定PID与常规PID控制系统相比,其震荡次数减少,超调量较小,过度时间缩短,具有较好的稳定性。
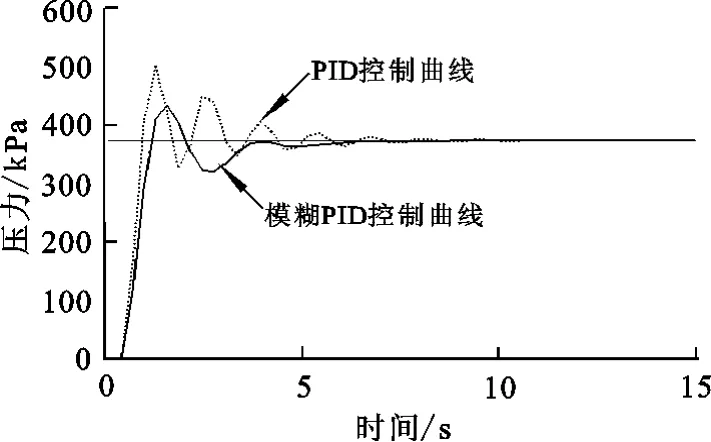
图4 仿真结果
6 结论
通过分析扬程流量特性曲线,得出恒压流量给料控制的稳压、节能优势。参数自整定模糊PID控制与传统PID控制相比,具有良好的稳定性,在稀土萃取过程中,可实现压力稳定控制,保证萃取料液长期稳定供应。
[1]曹永成,姜斌,李彦林.基于模糊PID的城市供水恒压控制研究[J].职业技术,2011(7):137-138.
[2]黄良沛,刘义伦,阳小燕.参数自适应模糊PID控制在恒压供水系统中应用[J].矿山机械,2005(7):29-30.
[3]肖顺根.稀土萃取中模糊自调整PID的给料流量智能控制系统研究[D].赣州:江西理工大学,2008:26-35.
[4]谢静.基于神经模糊PID混合控制的恒压供水系统[D].西安:西安科技大学,2011:32-33.
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15
水泵技术(2021年3期)2021-08-14
装备制造技术(2021年2期)2021-07-21
现代装饰(2020年7期)2020-07-27
运筹与管理(2019年10期)2019-12-17
通信电源技术(2016年5期)2016-03-22
中国水利(2015年7期)2015-02-28
电子设计工程(2015年15期)2015-02-27
湖南水利水电(2014年6期)2014-02-27
河南科技(2014年4期)2014-02-27