
TS30测量白山大坝三维网
2013-09-19 11:10:12戴江鸿
东北水利水电 2013年9期
田 甜,戴江鸿
(白山发电厂,吉林省 吉林市 132013)
TS30是一种能代替人进行自动搜索、跟踪、辨识和精确照准目标并获取角度、距离、三维坐标以及影像等信息的智能型电子全站仪。它是现代多项高技术集成应用于测量仪器制造领域的最杰出代表,它通过CCD影像传感器和其他传感器对现实测量目标进行识别、迅速作出分析出分析、判断和推理,实现自我控制,并且自动完成照准、读数等操作,以完全代替人的手工操作。
1 概述
白山大坝三维网设计了11个测点,编号为C0—C10,左岸为双号、右岸为边单号,下游编号小、上游编号大。其中C0为原点,C3,C4为联系三角网项目的工作基点,D0为起始方向。由坝下游的5个点C0—C4组成的五形称为主网,由全部测点组成的多边形称为全网,C4至C6为基线边。
原来是由T2002电子经纬仪配合DI2002光电测距仪和GRE4a数据终端进行测量,通过全圆测回法对水平角、垂直角同时观测,共6个测回。每测回的6个数据互差应小于0.2 mm,各测回平均值互差应小于0.3 mm。TS30测量机器人替代T2002,运用压电陶瓷驱动技术将电能转换为机械能,以微米级的步进达到最大转速和加速度,使仪器具有极佳的动态跟踪性能。该仪器的能耗低,转动噪声较T2002减少很多,以0.5″的测角精度和 (0.6 mm+1×10-6D)mm的测距精度重新定义全站仪的精度标准,完美融合角度测量、距离测量、自动目标识别和快速跟踪等功能,为白山大坝三维网测量提供了技术保障。
2 观测方案
坝区三维网为一等边角网,按一等边角测量技术要求进行观测,作业参照《白山大坝安全监测技术规程》,共11站,逐站按全圆测回法观测,此次使用新仪器徕卡TS30全站仪,徕卡TS30全站仪(测角精度为0.5″、测距精度为0.6 mm+1 ppm)具有自动照准ATR功能,加装“多测回测角程序”,观测过程完全自动化,遇限差超限自动重测,所有数据记录在仪器内存中。观测数据经内业检查预处理后,以C0为起算点、C0-D0为起算方向进行严密平差。三维网最弱点中误差不大于2.5 mm。
3 三维网观测技术要求
3.1 观测规定
一等水平角方向观测法观测12测回,天顶距对向观测中丝法各6测回,边长对向观测各4测回(一测回读记4次),气象元素每边观测始末各测定1次,仪器高、觇标高在观测前后用钢尺各量测1次。水平角测量时,方向数超过6个时进行分组,组间重合2个方向,其中一个为零方向。需要说明的是,上述规定是在测角、测距分步进行时的规定,随着技术进步,全站仪测角、测距实现了一体化,配合多测回测角程序,测角、测距进一步实现了测回观测自动化,测量过程无需人工干预。此次使用TS30测量机器人,水平角、天顶距、距离测量三者测回数统一设定为12测回。
3.2 重测规定
对向观测距离、三角高差(有二等水准高差的除外)超限时,重测对向值之一,直至合格为止,水平角观测误差超限时,按如下规定进行:
1)上半测回归零差或零方向2C超限时,该测回应立即重测,但不计重测测回数;
2)同测回2C较差或各测回同一方向值较差超限,可重测超限方向(应联测原零方向),一测回中重测方向数超过测站方向总数的1/3时,该测回重测;
3)若测错方向或个别方向临时被挡,均可随时进行重测;
4)重测必须在全部测回数测完后进行,当重测测回数超过测回总数的1/3时,该站应全部重测;
5)利用机载软件多测回测角程序测量时,只要把各项限差输入全站仪,测量超限时,仪器会提示,可自动进行重测。
3.3 观测条件
1)观测应在成像清晰,稳定的条件下进行,晴天的日出、日落和中午前后,如果成像模糊或跳动剧烈,不进行观测;
2)观测待仪器温度与外界气温一致后开始,观测过程中用测量伞遮阳;
3)雷雨前后、大雾、大风(四级以上),雨、雪天气和能见度很差时,不进行距离测量;
4)安置反射棱镜时应精确对中整平并对准测站,按仪器站的指令操作及时读取和报告气象元素和镜高;
5)读取气象元素时,保证温度表和气压表不受太阳直射,要保证空气流通,读取温度前温度表至少要通风15 min;
6)测距时暂停无线通话,以免干扰;
7)测距时避免有另外的反光体位于测线延长线上,避免有物体在测线上晃动或人在测线上走动;
8)晴天进行往返观测和三角观测时,分配在两个异午时段进行;
9)如果白天气候不理想,可选在晚间观测。
3.4 观测限差与取值
《国家三角测量规范》中对测角、测距限差列于表1-4。
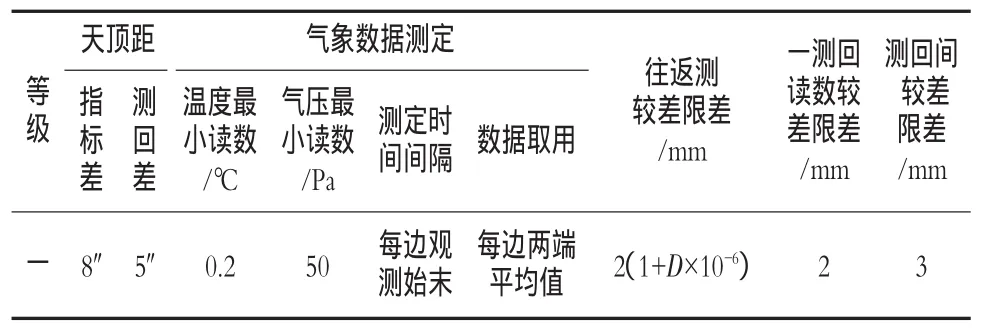
表1 测距作业要求

表2 水平角方向观测法要求

表3 平面观测 记录 计算取位要求
4 观测成果
原始数据按前述观测方案要求进行采集,经检查合格的原始观测数据,利用仪器与计算机通信导入计算机后,使用武测科傻平差软件COSA进行整体符合性概算与预平差计算,包括观测边长的投影高程面、气象元素、仪器与镜站高、仪器参数等各种参数的改正计算。概算不满足限差要求时,依据反馈信息分析,确定具体返工的站点与元素及时进行返工。概算满足规范限差要求后,进入整体平差计算,当平差后出现点位中误差不满足设计要求时,再依据平差反馈信息进行局部原始数据返工,并重复上述计算与返工程序,直至取得整体合格的原始观测成果。

表4 多测回观测限差设定表
概算项目:概算条件采用专用软件自动搜索进行。三维网三角形闭合差一等不大于±2.5″,边(极)条件、方位角条件与边长对向观测互差均满足相应图形计算限差要求。坝区水准网,测段往返测较差计算的偶然中误差不大于±0.45 mm/km,测段往返测高差较差与环线闭合差不大于相应线路限差。平差计算:三维网验后方向单位权单误差不大于±0.7″,最弱点中误差不大于2.5 mm。
采用徕卡全站仪TS30施测,严格按一等边角网相关规范测量,确保数据准确可靠。三维网往期平差均采用由河海大学兰孝奇老师编写的DOS操作系统下平差软件进行三维拟稳平差,大坝第三次定检时建议分别进行平面网平差和高程平差。此次内业对距离值进行气象改正、周期误差改正、仪器常数改正、倾斜改正、投影改正后得到各边的水平距离,再使用科傻平差COSA进行平面网平差及三角高程平差。各项数据满足精度要求。全网50个方向观测值,25条边长观测值,平差以C0为固定点、以C0-D0为固定方向对基准网进行概算平差计算,最大三角形闭合差为 2.4″,最小为-0.1″,均小于规范规定±2.5″的要求,见表5,平差验后最大单位权中误差±0.51″<±0.7″,最弱点 C9 点位中误差±0.21 mm<±2.5 mm,见表 6,最弱边 C6~C8边长相对中误差为1/416000,平均边长相对中误差1/800000。满足规范与设计要求。高程按三角高程计算点到点高差,按点到点平距定权,经平差计算得到各点高程值。见表6。
5 结 语
此次观测在观测条件上掌握较好,所有项目都在较好的气象条件下完成,计算方法正确,整个计算过程经过严格的质量检查,观测成果达到了很高的精度,各项精度指标满足规范和设计要求。此次校测后得出如下结论与建议:
1)三维网点均位于山脊或山顶上,标体稳固,通视方向旁离障碍物不少于5 m,水准网点位于坝区基岩或坚实的风化岩基上,标体稳固,给高精度观测创造良好的基础条件。
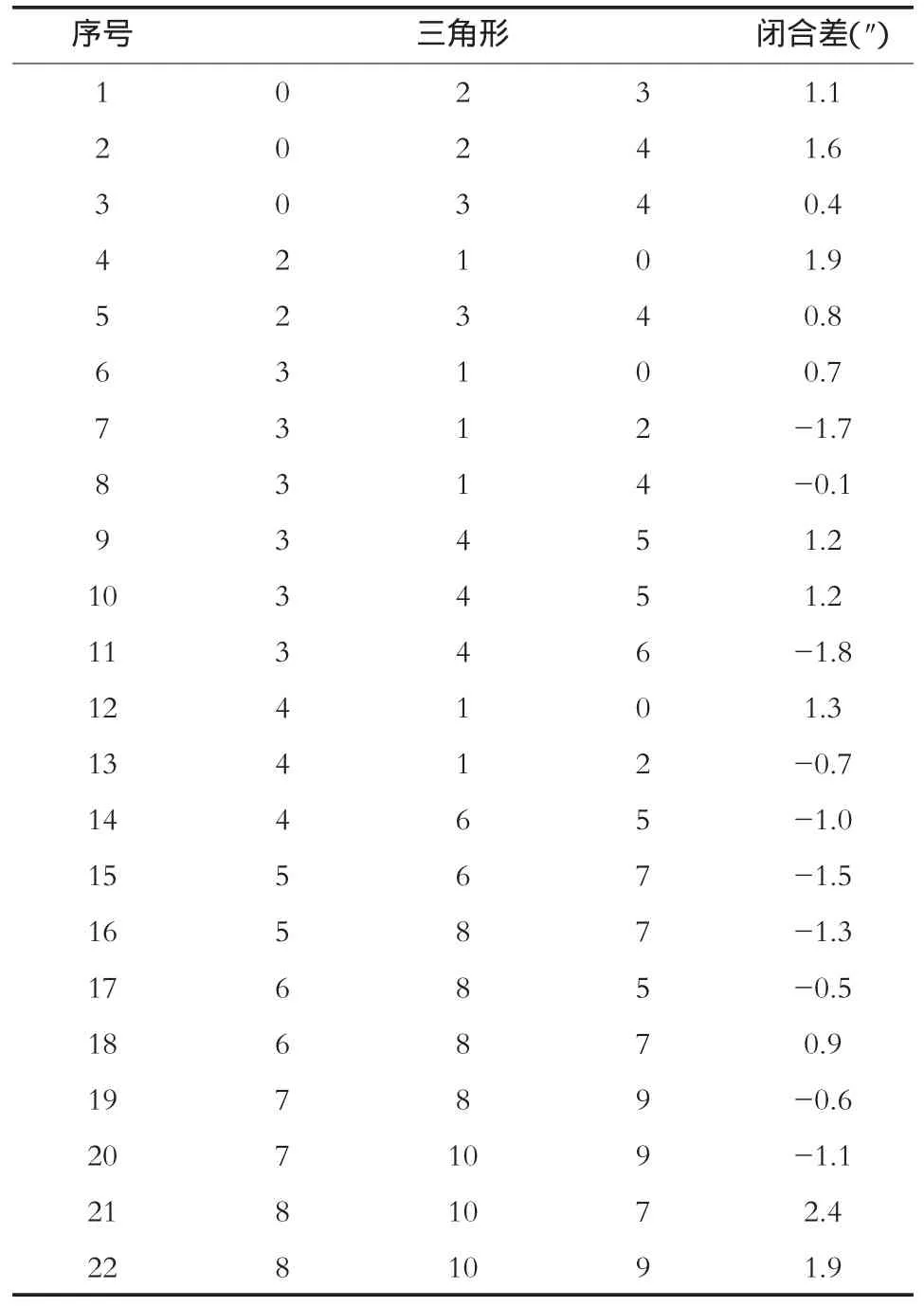
表5 坝区三维网三角闭合差统计表
2)结合坝区气候与观测特性,选择合适的观测时段,选用自动高精度观测设备并通过观测软件控制,保证了测站原始观测数据的采集在有效观测时段内完成,确保了原始观测数据的准确性。
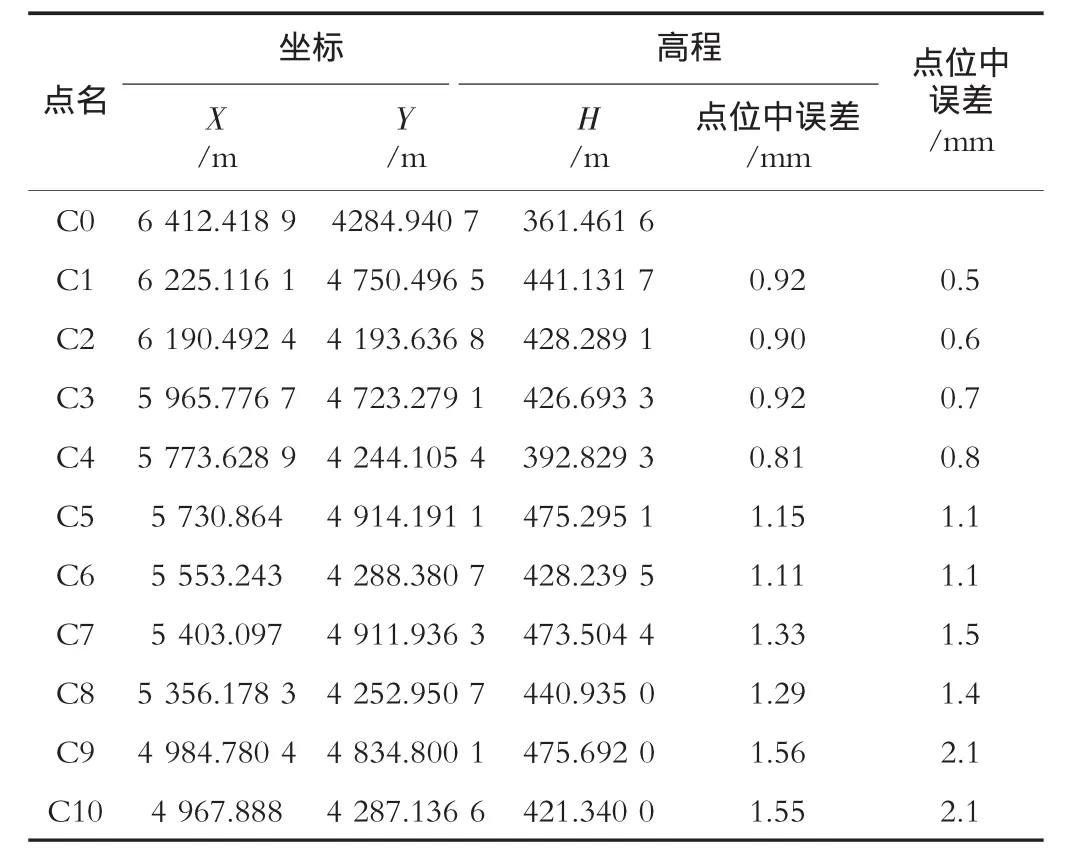
表6 坝区三维网平差坐标高程精度表
[1]梅文胜,张正禄.测量机器人在变形监测中的应用研究[J].大坝与安全,2002(5):16-19.
[2]武汉测绘学院测量平差教研室.测量平差基础(第三版)[M].北京:测绘出版社,1996,5.
[3]张正禄,测量机器人[J].测绘通报,2001(5):17.
猜你喜欢
工矿自动化(2022年1期)2022-01-25 02:25:10
装备维修技术(2020年21期)2020-04-22 11:31:59
中小企业管理与科技·下旬刊(2019年8期)2019-11-09 19:45:22
考试周刊(2019年22期)2019-03-18 09:53:26
航天电子对抗(2018年3期)2018-07-14 02:53:30
电子测试(2018年6期)2018-05-09 07:31:54
测绘科学与工程(2016年6期)2016-04-17 06:51:25
中国学术期刊文摘(2016年8期)2016-02-13 13:04:44
心理与行为研究(2014年1期)2014-04-23 12:29:24
雷达学报(2014年4期)2014-04-23 07:43:19
