
无人直升机非线性控制器设计
2013-09-16 11:35徐东杉
直升机技术 2013年4期
鲁 可,徐东杉
(中航工业直升机设计研究所,江西景德镇 333001)
0 引言
无人直升机是一种具有自主飞行和垂直起降能力的特殊飞行器,飞行控制系统是无人直升机的核心。无人直升机对象特性复杂、稳定性差、通道耦合严重、非线性特性强并且飞行模态较多,这对直升机的飞行控制系统提出了更高的要求。无人直升机飞控系统作为一个研究热点,引起了各国学者的广泛关注,并且取得了丰硕的成果。J.Gadewadikar运用静态输出反馈鲁棒控制方法设计了直升机的飞行控制系统,取得了良好的效果[1]。Nakwan Kim等运用自适应输出反馈方法设计了飞行控制系统,对直升机有一定的借鉴意义[2]。杨一栋教授作为国内较早研究直升机控制系统的学者,在其著作《直升机飞行控制系统》中提出了显模型跟踪系统,取得了较好的控制效果[3]。
1 反馈线性化理论
在非线性控制理论中,有两种常用的运算:李导运算数和李括号运算。下面将对这两种运算进行简单的介绍。
1.1 李导数运算
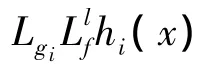
为了定义李导数,现给出一个光滑的标量函数h(x)及一个向量场f(x),则该标量函数的李导数为该标量函数沿相应向量场的导数,称之为h对f的李导数。该导数是一个新的标量函数,记为Lfh。

多重李导数可以递归地定义为:

1.2 李括号运算
如果f(x)与g(x)为Rn上的两个向量场,两个同维的向量f(x),g(x)的李括号运算定义为:

假设系统具有相对阶r,即:


则原来的输出可以写成:

记为:

假设A(x)是可逆的,则可以得到逆系统的控制输入:

其中:b(x)为非线性输出状态,A(x)为非线性控制分布,参数v为期望的闭环系统动态性能特征。在该控制律作用下,闭环系统可以表达为:

2 直升机纵向非线性模型
直升机飞行高度随俯仰角的变化而变化,直升机动力学方程可以由下面的公式进行描述:

其中:
2.1 耦合性分析
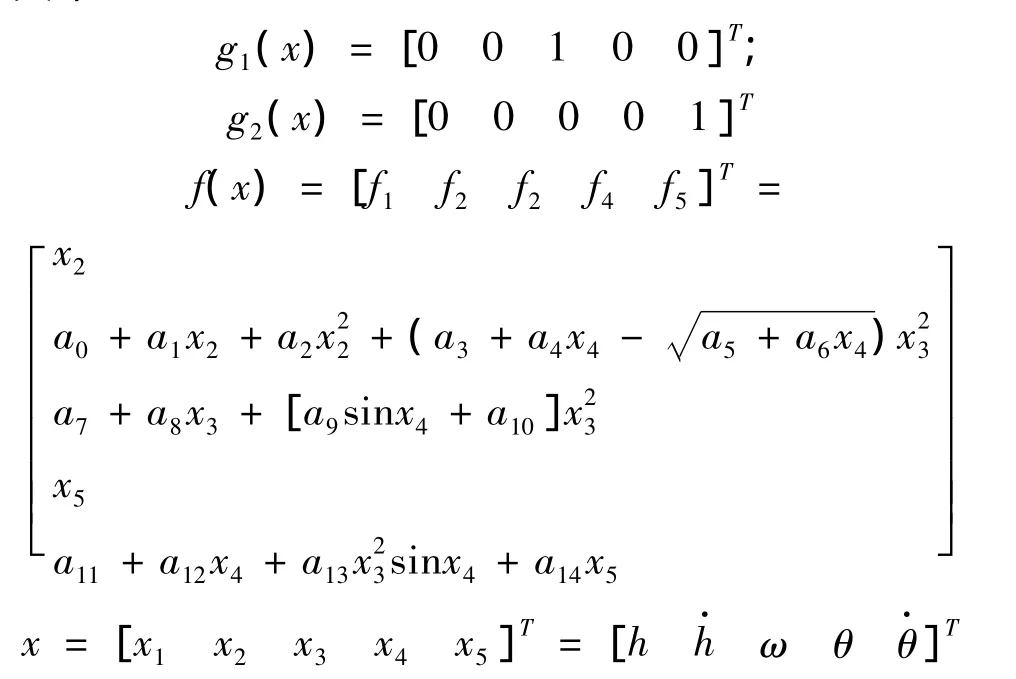
假设直升机高度和俯仰角的初值为0,取油门控制输入为20,总距输入为0,直升机高度和俯仰角响应曲线如图1所示。

图1 油门输入下高度和俯仰角响应
取油门控制输入为0,总距输入为20,直升机高度和俯仰角响应曲线如图2所示。
图2 总距输入下高度和俯仰角响应
从仿真结果可以看出,高度和俯仰角通道存在严重影响,耦合严重。
2.2 反馈线性化控制器设计
针对直升机模型进行反馈线性化,由反馈线性化理论可得:


设计控制律为:

现在选取高度通道进行进一步设计,经过反馈线性化,高度通道的伪线性系统可以近似用一个三阶积分环节来表示。现在用LQR方法对其进行设计,三阶积分系统的标准型实现为:

在进行LQR设计时,选择性能指标函数为:

R=1,于是得到状态反馈矩阵:

控制系统的结构框图如图3所示。

图3 飞控系统结构图
经过校正以后系统的阶跃响应如图4所示,可以看出控制系统的性能满足相应的要求。

图4 高度的阶跃响应
3 结论
本文针对无人直升机这一特殊控制对象非线性、强耦合等主要特点,首先根据非线性反馈线性化理论对其进行线性化处理,得到系统的伪线性系统,进而采用线性系统的设计方法设计最优控制器。通过仿真验证,该控制系统具有良好的性能。
[1]Gadewadikar J.H-infinity Static Output-Feedback Control for Rotorcraft[R].AIAA-2006-6238.
[2]Kim N.Adaptive Output Feedback for High-Bandwidth Flight Control[J].Journal of Guidance,Control,and Dynamics,2002,25(6):993 -1002.
[3]杨一栋,直升机飞行控制系统[M].北京:国防工业出版社,2011.
[4]郭署山.无人直升机着舰控制技术研究[D].南京:南京航空航天大学,2010.
[5]尹亮亮.无人直升机飞行控制若干关键技术研究[D].南京:南京航空航天大学,2012.
[6]Gavrilets V.Nonlinear Model for a Small-Size Acrobatic Helicopter[R].AIAA -2001-4333.
[5]Civita M L.Design and Flight Testing of a High-Bandwidth H∞Loop Shaping Controller for a Robotic Helicopter[R].AIAA -2002-4836.
[7]Calise A J.Flight Evaluation of Adaptive High-Bandwidth Control Methods for Unmanned Helicopters[R].AIAA-2002-4441.
猜你喜欢
高校应用数学学报A辑(2022年4期)2023-01-02
西安电子科技大学学报(2022年1期)2022-04-26
中学生数理化(高中版.高二数学)(2021年4期)2021-07-20
中等数学(2020年2期)2020-08-24
数学大世界·中旬刊(2017年3期)2017-05-14
科技与创新(2017年3期)2017-03-17
北京航空航天大学学报(2016年7期)2016-11-16
高中生学习·高三版(2016年9期)2016-05-14
新高考·高一物理(2015年7期)2015-09-21
湖南师范大学学报·自然科学版(2014年5期)2014-11-14
