
基于变型波的超声TOFD近表面检测新方法*
2013-09-15 09:22林乃昌
机电工程 2013年8期
林乃昌
(厦门市特种设备检验检测院,福建 厦门 361004)
0 引 言
超声TOFD(time of flight diffraction technique)是一种基于衍射信号实施的检测技术,与常规脉冲回波超声检测技术相比,其具有检测可靠性好、定量精度高、检测简便快捷等优点,适合于中厚板焊缝的无损检测,尤其适合危险性大的裂纹及未融合等面状缺陷,是其它检测方法无法比拟的[1-4]。但是该方法也存在自身的技术缺陷问题,主要是对近表面的缺陷检测可靠性不够,近表面检测有两个主要的问题:①直通波的存在影响缺陷信号显示,产生检测的上表面盲区,对检测的可靠性的影响很大;②由于近表面区域的时间测量不准确导致深度分辨力很差,严重影响缺陷测定的准确性[5]。
为了解决近表面检测问题,张锐等人[6]提出了一种超声TOFD法和脉冲反射法相结合的检测技术,该方法采用超声反射法有效弥补了超声TOFD法对表面及近表面缺陷不敏感的缺点,但是该方法加大了检测工作量且对硬件要求较高。迟大钊等人[7]从图像处理角度试图提高混叠在近表面的缺陷波,提出了一种图像能量分布法,该方法在一定程度上提高了近表面缺陷的辨识能力,但受待处理图像的成像质量影响很大,迟大钊等人[8]又从检测方法角度,提出了一种基于TOFDW模式的检测方法,该方法进一步提高了近表面缺陷的辨识能力,但该方法实际为TOFD法二次波检测方法,在解决近表面盲区问题上仍有一定的局限性。
为了从根本上解决TOFD表面盲区问题,本研究从检测方法角度,提出一种基于TOFD变型波的表面检测新方法,通过计算变型波、直通波及底面反射波,得出变型波在纵波检测窗口出现的条件,并利用变型波对缺陷进行检测,以减小测量误差并提高检测分辨力。
1 盲区的深度测量误差及分辨力
扫查面附近的内部缺陷信号可能隐藏在直通波之下,导致无法识别,因此上表面盲区就是直通波信号所覆盖的深度范围。
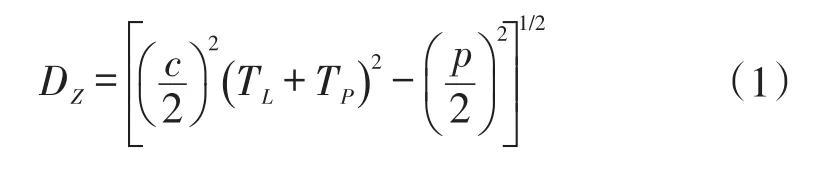
如果声速为c,探头中心距为p,直通波的传输时间是TL,直通波的脉冲时间宽度为TP,则盲区的深度公式如下:
TOFD技术的测量包括缺陷在工件中位置(深度)的测量和缺陷尺寸的测量,而缺陷尺寸的测量又包括缺陷的高度和长度的测量,因此测量误差也包括了位置(深度)的测量误差以及缺陷高度和长度尺寸误差。TOFD技术的深度测量误差随着接近表面而迅速增大,由于在近表面区域内衍射波传输路径接近水平路径,深度上一个较大的变化只会引起时间上一个很小的变化,因此近表面深度测量不准,分辨力比较差。
根据缺陷深度h计算公式,假定缺陷尖端处于两个探头中间的对称位置,则时间t由下列公式得出:

整理后,尖端深度为:

两边平方得:

对上式关于h和t进行微分,深度误差δh可以由时间误差δt来表示,即:

将式(2)代入上式得:

对于近表面,h远小于s,则公式可以简化为:

从上式中不难看出,随着深度h的减少,误差δh迅速增加。因此缺陷越接近上表面,测量越不准。而从上述公式中也能看出,通过减少探头中心距有助于减小测量误差。
空间分辨力是指两个信号之间最小分辨距离。为了获得上、下端点能区分的反射体的最小尺寸,其量值用声学脉冲的长度来确定。
如果tp是声学脉冲长度的时间,th是深度为h的衍射信号的传输时间,则空间分辨力R可以按照下式计算:
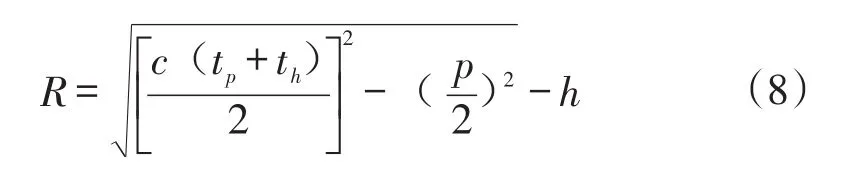
分辨力随着深度的增加而提高,减少探头中心距则可以改善分辨力。
2 基于变型波的检测方法
由于TOFD检测是以超声波信号传输时差来确定缺陷深度的,而超声波的传输时间和其传播的距离和声速有关,TOFD探头发出横波,其角度大约是纵波角度的一半,由于探头发出的纵波在钢中会发生折射、反射和衍射,在折射、反射和衍射过程中会产生纵波变横波或者横波变纵波的波型转换,在某些特殊情况下,转换出来的变型波信号有可能比底面纵波信号先到达接收探头。这些变型波对上表面附近的缺陷判断特别有用,因为这些缺陷的纵波信号隐藏在直通波中,而横波波速较慢,使得信号出现时间稍晚并且分辨力较好,能有效减小盲区范围和提高分辨力[9-10]。
本研究用c代表纵波声速,用s代表横波声速,用CC代表纵波直通波,用CSF代表折射纵波在缺陷F处产生反射变型波,用CCD代表底面纵波。TOFD检测示意图如图1所示。
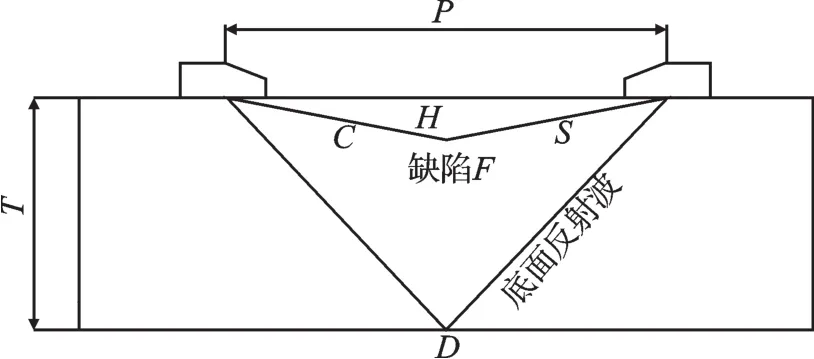
图1 TOFD检测示意图
各信号传输时间表达如下:
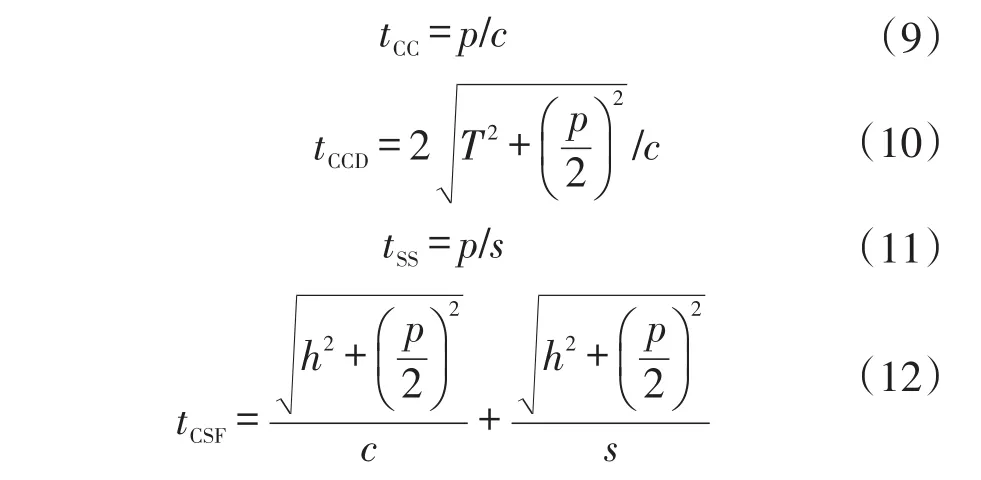
其中,纵波声速为5 930 m/s,横波声速为3 230 m/s。当tSS<tCCD时,即直通横波在底面纵波之前出现,是变型波出现在纵波窗口的前提,则有:

将横波、纵波声速代入,化简得:

当tCSF<tCCD时,即变型波在底面纵波之前出现,则有:

将横波、纵波声速代入,化简得:

将式(14)代入得:

上式说明在探头中心距取1.3T时,在缺陷深度约距离表面0.2T范围内均可出现变型波,如探头中心距小于1.3T时,变型波出现范围将更大。而盲区范围一般不超过检测厚度的20%,因此基于变型波的检测方法是能满足表面盲区范围内的检测方法。
基于变型波检测方法可通过读取纵向直通波时间及纵向直通波与变型波之间的时差,并根据探头间距及纵波声速计算获取。
令tCC=p/c,则:

根据缺陷的几何关系,有:
整理得缺陷的埋藏深度为:

3 实验结果与分析
本研究采用电火花技术,在厚度为40 mm的试块上加工人工缺陷距检测面不同深度依次为1.0,2.0,3.0,4.0,5.0,6.0,7.0,8.0,9.0,10.0 mm 的线切割槽。采用一对宽带窄脉冲探头(晶片尺寸Φ6 mm,中心频率5 MHz,探头角度为60°),以水为耦合剂,对各人工缺陷采用传统TOFD和基于变型波方法的检测,传统TOFD方法采用中心距p=100 mm,在此计算的上表面盲区DZ=9.4 mm。采用基于变型波方法探头中心距p=50 mm,取样间隔为0.04 μs。
两种方法的检测结果如表1所示。
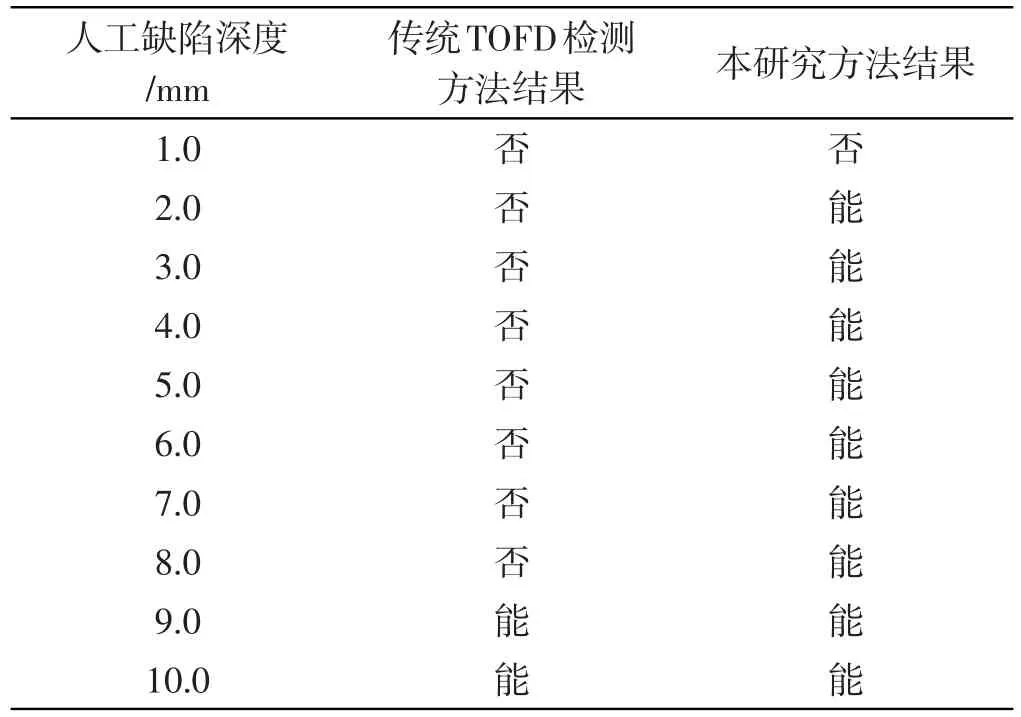
表1 两种方法的检测结果
测量误差比较图如图2所示。
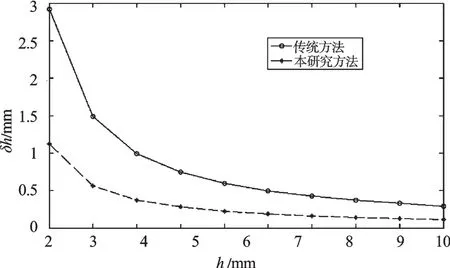
图2 测量误差比较图
分辨力比较图如图3所示。
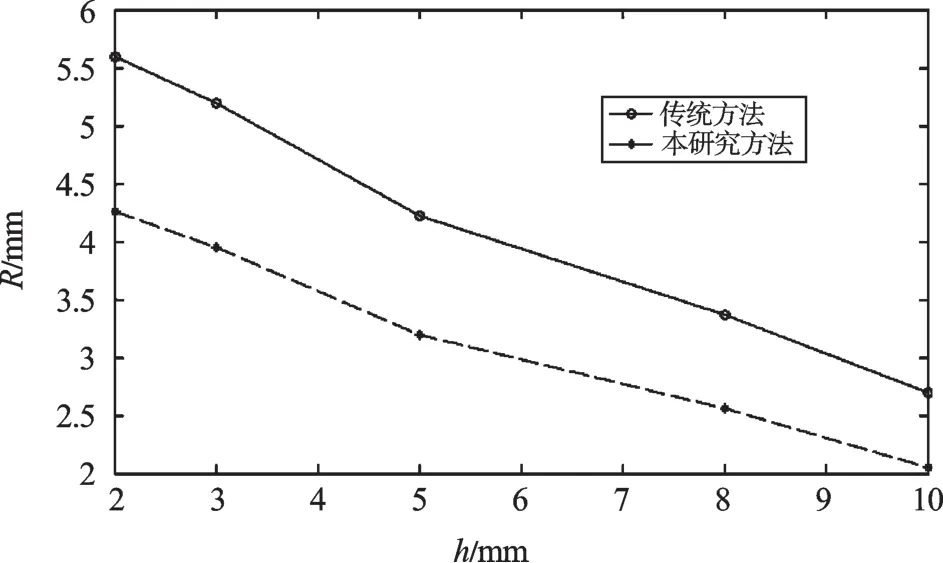
图3 分辨力比较图
实验结果表明,采用本研究方法能有效检测到埋藏深度2.0 mm的缺陷,而传统方法在计算盲区范围内则基本无法检测到缺陷,图1及图2也说明,本研究方法在检测过程中,测量误差及分辨力均更优于传统方法。
4 结束语
为了解决传统TOFD法对埋藏在近表面的缺陷波无法辩识等近表面盲区问题,本研究提出了一种新的近表面检测方法。通过理论分析和实验比较可知,与传统TOFD检测方法相比,基于变型波的方法能有效地检测到埋藏深度2.0 mm的缺陷,并有效地解决TOFD近表面盲区问题;该方法通过改变探头中心距和采用变型波检测方法能有效减小测量误差并提高盲区的分辨力;虽然提出的基于变型波的检测方法能有效解决表面盲区的问题,但是由于在波的传播过程中有纵波直通波、底面反射波及变型波等波型,较为复杂,目前要通过人工方法来首先调整探头中心距和人工判断变型波的位置,而智能判别将是下一步研究的重点。
(References):
[1]GANG Tie,CHI Da-zhao.Novel approach to the enhance⁃ment of ultrasonic TOFD B-scan image for the measure⁃ment of weld crack[J].Science and Technology of Weld⁃ing and Joining,2007,12(1):87-93.
[2]CHARLESWORTH J P,TEMPLE J.Engineering Applica⁃tions of Ultrasonic Time-of-Flight Diffraction[M].2nd ed.US:Research Studies Press Ltd.,2001.
[3]迟大钊,刚 铁,姚学英.一种基于超声TOFD法的近表面缺陷检测模式[J].焊接学报,2011,32(2):25-29.
[4]盛朝阳,钢 铁,迟大钊.基于分水岭的超声TOFD检测图像分割[J].机械工程学报,2011,47(8):35-40.
[5]强天鹏.TOFD技术的检测盲区计算和分析[J].无损检测,2008,30(10):738-741.
[6]张 锐,万明习.超声衍射—回波渡越时间方法焊缝裂纹原位定量无损估计[J].机械工程学报,2000,36(5):54-57.
[7]CHI Da-zhao,GANG Tie,GAO Shuang-sheng.Background removal and weld defect detection based on energy distribu⁃tion of image[J].China Welding,2007,16(1):14-18.
[8]迟大钊,钢 铁,姚英学,等.一种基于超声TOFD法的近表面缺陷检测模式[J].焊接学报,2011,32(2):25-28.
[9]BASKARAN G.Shear-wavetimeofflightdiffraction(S-TOFD)technique[J].NDT&E International,2006(39):458-467.
[10]孙忠波,郑红霞,张 平.TOFD检测中借助变型波确定缺陷偏心距及缺陷精确深度的探讨[J].无损检测,2010,32(7):500-508.
猜你喜欢
数学大王·趣味逻辑(2022年8期)2022-07-10
红外技术(2022年4期)2022-04-25
西藏艺术研究(2021年4期)2021-06-02
今日农业(2020年20期)2020-12-15
天然产物研究与开发(2018年9期)2018-10-08
小资CHIC!ELEGANCE(2018年24期)2018-08-13
网络空间安全(2016年3期)2016-06-15
体育科技(2016年2期)2016-02-28
医疗卫生装备(2015年9期)2015-12-27
中国光学(2015年5期)2015-12-09
