
基于光流法的气密性检测装置研究
2013-09-15 09:22吴春龙潘海鹏夏永明
机电工程 2013年8期
吴春龙,潘海鹏,夏永明
(浙江理工大学 机械与自动控制学院,浙江 杭州 310018)
0 引 言
为确保产品质量,消除安全隐患,密闭容器出厂前必须做密封性能检测。充气检测是其常规检测方法,被称为气密性检测[1]。
气密性检测的方法有超声波法、直接压力测试法、压差测试法、气泡法、涂抹法等[2]。其中,气泡法和涂抹法难以定量检测。其他方法可以定量检测,但不能确定泄漏的具体位置。随着科技的进步,对压力容器气密性同时进行定性、定量检测已成为可能。王红一等人[3]利用高速摄像法对垂直矩形管内不同直径气孔产生的上升气泡进行了实验测量研究,对不同工况下气泡的特征参数和运动曲线进行对比分析,总结了气泡的运动规律。O.Zielinski等[4]提出了一个用光流概念来检测气泡的新图像处理方法,在理想实验条件下完成了对运动气泡的检测,但是所检测的气泡结构单一,没有考虑到有很多气泡产生时,气泡图像的重叠。Naïm Samet[5]用超声波方法检测了粘性流体中气泡的大小和数量。但在实际应用中,气泡所在的流体并不是理想状态,有一定的浑浊度和粘性,且气泡在上升的过程中会发生重叠和聚散的现象。以上研究于实际应用有一定的困难。
为实现定量检测与定位检测相结合,本研究将图像处理法应用于实际,研究以光流法为核心的气泡图像处理算法,并基于该方法设计一套半自动化的基于机器视觉的压力容器气密性检测系统,最后,通过实验验证该方法的可行性。
1 气密性检测系统工作原理
基于机器视觉的气密性检测系统主要由视觉传感、图像处理和机械设备三大模块组成。视觉传感利用高速摄像机、图像监视器、电脑及视频采集卡对水中气泡进行拍摄和记录;图像处理主要是利用Matlab对采集到的气泡图像应用光流原理进行分析处理,识别出气泡的大小、数量及泄漏口,并转变为数字信号传入控制系统中;机械设备是设计机械结构来装卸待检压力容器,自动执行控制系统给出的命令。该系统利用计算机得出的数字信号转变为开关量信号,控制机械设备的启停运行,以达到控制的目的。基于机器视觉的气密性检测系统原理如图1所示。
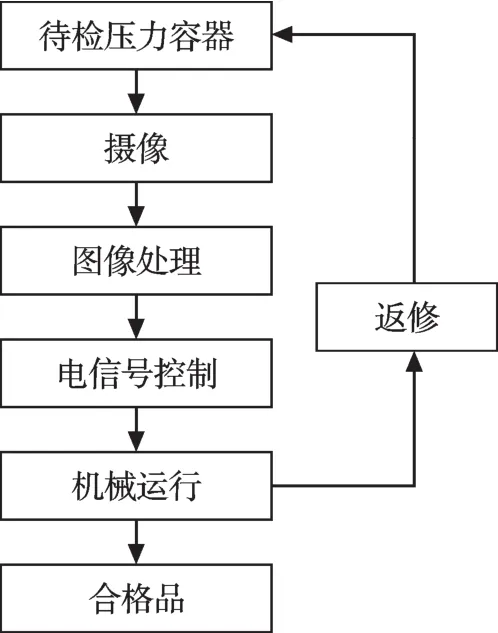
图1 基于机器视觉的气密性检测系统组成
2 气泡图像的采集
视觉传感模块包括高速摄像机、图像监视器、电脑及视频采集卡。该套设备主要用来对气泡拍摄并记录其在水中的运动,图像采集系统如图2所示,用高为650 mm,底截面为1 130 mm×520 mm的透明长方体有机玻璃缸盛水,将加了0.8 MPa气压的待检测压力容器沉入水中,用高速摄像机拍摄压力容器在水中是否有气泡,并将所拍得的照片信息传入计算机进行处理。高速摄像机采用的分辨率为512×480,型号为Photron Fastcam Super 10K,Model 10KC,拍摄速度为30 fps,每次拍摄时间为16 s。
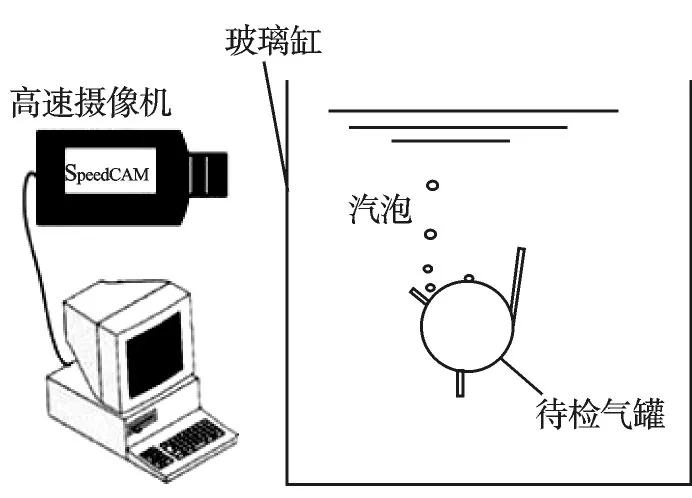
图2 高速摄像系统模拟图
3 基于光流法的气泡图像检测法
图像处理是利用Matlab将采集到的图像进行光流计算以获得气泡的表面信息。利用该方法可直观地显示气泡的大小、分布及运动过程,对流场内的气泡运动可进行无干扰检测。
3.1 光流图像处理方法
光流通常定义为一个图像序列中的图像亮度模式的表观运动[6]。在图像序列中,通过像素强度在时域与空间上的变化及像素之间的相关性,可以确定各像素位置的“运动”。
假设图像上一点U,其灰度值为I(x,y,t),速度为V=(Vx,Vy)。因光照完全均匀,跟踪的像素点的亮度不随着时间发生变化,经过一段时间Δt后,有下式成立:

求导后,整理得光流约束方程为:

由于光流法存在孔径问题,只有一组Vy、Vx可以直接计算出来。为避免估计不足,Horn和Schunck[7]提出了一种基于光流的全局平滑约束的算法,利用全局能量泛函,求其最小化以获得光流场。为追踪拍摄,用矢量Vx和Vy表示每个像素点在水平和垂直方向上的速度。于是实际速度Vz可以由下式推出:

Vz的物理意义就是灰度图像上目标对象像素点的移动变化。气泡的位移图像如图3所示,用高速摄像机拍摄同一个气泡两次,前后间隔0.2 s。将拍摄到的图像合成到一起,可以看出气泡发生了位移。

图3 气泡的位移图像
Horn-Schunck法由于是基于全局平滑约束的,所以对背景的噪声特别敏感。因此在应用光流法前必须先对图像进行预处理。
3.2 图像转换、去除背景和滤波
为获得气泡图像,气液界面线的准确提取非常关键[8]。由于光线在气液两相界面处会发生多重折射和反射且拍摄过程中的噪声会使得气液界面线模糊不清,需对拍摄到的原始图像进行图像预处理[9]:
首先,用Matlab将采集到的气泡真彩图像转换成为灰度图像;其次,用对数变换进行图像增强;最后,用中值滤波法去噪。
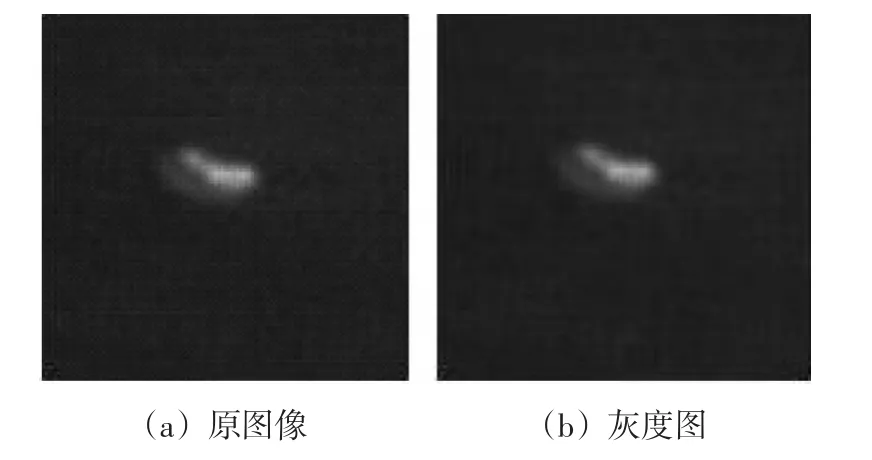
图4 变换后的灰度图与原图像的对比
转换前的真彩图像如图4(a)所示,转化后的灰度图如图4(b)所示。从图4中可以看出,经转换后的图像整体偏暗,气泡与背景之间界限模糊,不便处理。通过对数变换可以扩展低值灰度,压缩高值灰度,对数变换采用下式:

式中:g(x,y)—增强后图像的灰度值;f(x,y)—源图像的灰度值。
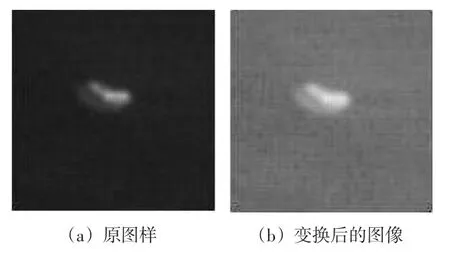
图5 对数变换后的图像与原图像的对比
对数变换后的图像与原图像的对比如图5所示。由图5可看出,对数变换后的图像比原始图像清晰度高,经变换后的图像背景有噪声,需要对其进行滤波处理。本研究用中值滤波法对图像进行滤波处理。
中值滤波法的思想为:设有一个一维序列f1,f2,…,fn,取窗口长度为m(m为奇数),对其进行中值滤波,就是从序列中相继抽出m个数fi-v,…,fi-1,fi,fi+1,…,fi+v(其中fi为窗口中心点值),再将这个m个点按其数值大小排序,取其序号为中心点的那个数作为滤波输出。
其数学公式可以表示为:

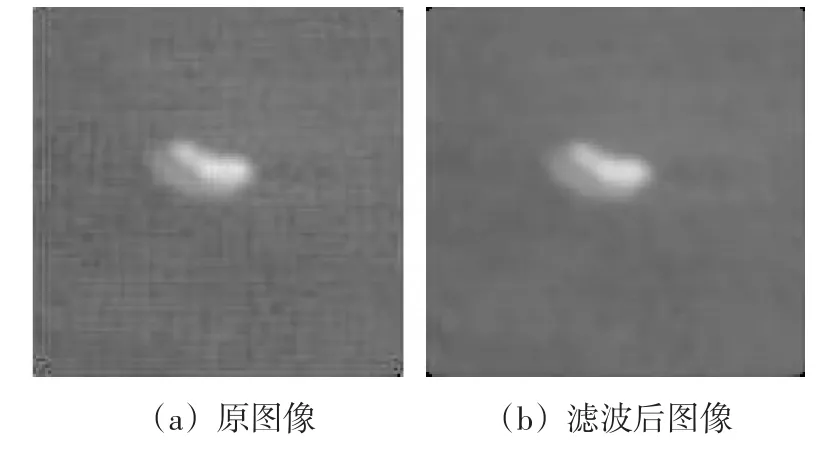
图6 原图像与滤波后图像的对比
本研究采用5×5的模版算子进行计算。中值滤波法的结果如图6所示。经过中值滤波法滤波后噪声变少,但是像素值分布太乱不利于计算,需将气泡图像进行区域分割。
3.3 图像像素值区域归类的图像区域分割法
用光流法检测刚体,其像素值不随时间而变,不同的像素点之间灰度分布均匀。而用光流法检测气泡后,其表面的灰度值分布不均,且会随时间而有较大变化,由此可以辨别出气泡的存在。为有效地表现气泡表面的灰度变化及方便计算其表面积,本研究将图像按其灰度值的分布进行区域图像分割。
本研究提出了一种基于图像像素值区域归类的图像区域分割法。因为对数变换后图像的像素值整体偏高,大部分像素值都在中高值区域,应将灰度按灰度值的分布分为 0~124,124~148,148~182,182~214,214~255的5个级数,并分别赋值0,80,130,195,250。这样就可以得到一个层次分明的气泡图像,如图7所示。
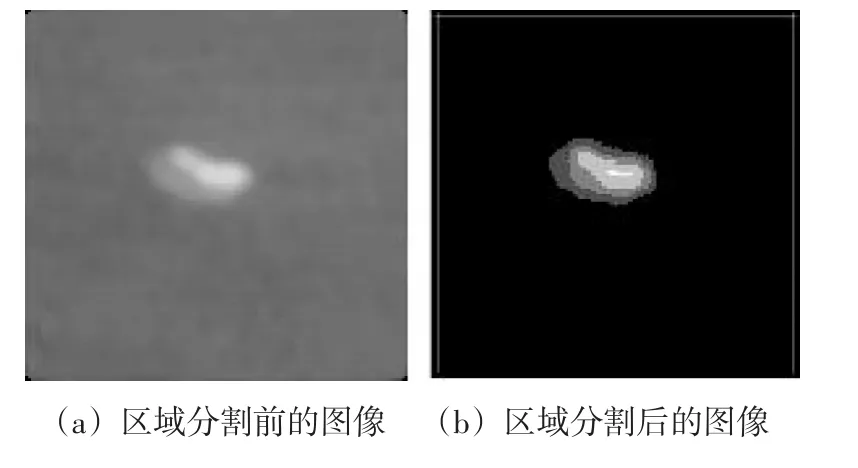
图7 经区域分割后的图像与原图像的对比
3.4 图像处理结果与讨论
压力容器泄漏量用泄漏气泡的直径和数量来计算。其公式如下:

式中:S—泄漏量,Si—第i个气泡的面积,i—气泡的序号,n—得到的气泡数量,K—气泡面积转体积因子。
为确认光流法的有效性,本研究进行了一系列实验。将导气管插入容器并浸入水中产生气泡来模拟泄漏,后用气密性检测系统检测其气密性,以此来验证系统的可行性。该实验共4组,将第1组气泡的直径大小控制在4 mm左右,第2组控制在8 mm左右,第3组控制在12 mm左右,第4组控制在16 mm以上。笔者对每组实验采集4次,采集时间为16 s。用计算机分别对每组图像的数据自动计算气泡的直径及数量,将其与人工计算结果作对比。计算结果对比如图8所示。
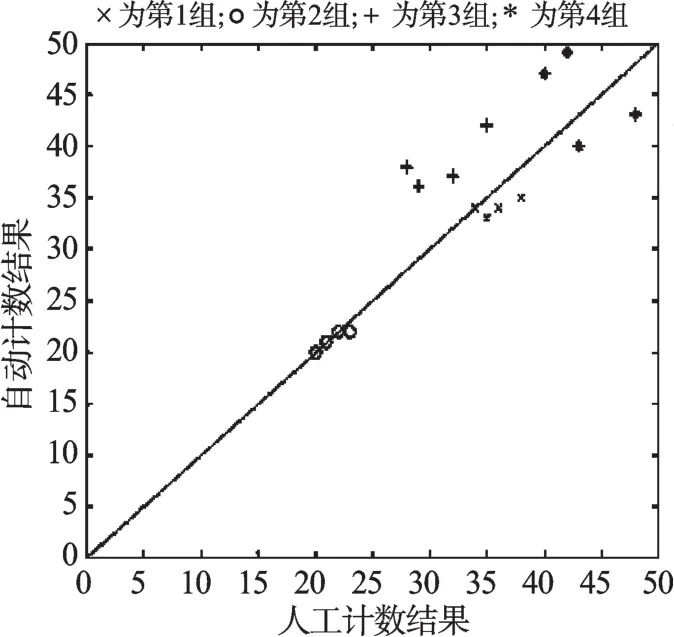
图8 自动计数与人工计数结果的对比
用计算出的气泡数据来计算平均泄漏量并与理论泄漏量进行比较。其结果如表1所示。
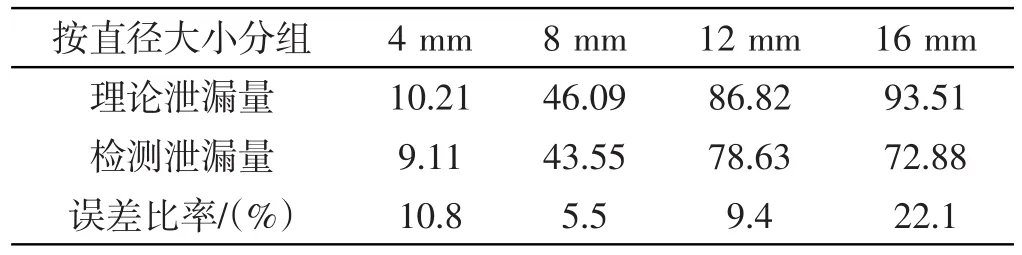
表1 计算泄漏量与理论泄漏量的比较
分析发现,该系统可准确检测的最小气泡直径为4 mm。当气泡直径小于这个值时,气泡表面会发生严重的折射和反射,气泡界面和背景之间的界限模糊,导致检测不出准确的结果。气泡检测最合适的直径在8 mm左右。这时的气泡大小适中,情况稳定,不会产生翻转和湍流,速度也保持一定比率。随着气泡直径的继续增大,气泡表面不规则程度加深,甚至会产生气泡之间的融合与碰撞。当达到12 mm时,气泡表面发生严重的不规则形变,往往会将一个大气泡表面辨识成两个小气泡的表面,但检测到的泄漏量误差不大,当气泡直径达到16 mm及以上时,气泡产生湍流,相互碰撞后产生小气泡,这些小气泡大小不一且分布不均,很容易发生相互重叠的效果,使验证结果与实际情况严重不符。
本研究还发现,气泡检测最适合的直径在8 mm左右。如果要求不高,气泡直径在4 mm~12 mm之间都可以用光流法进行检测。
4 气泡检测装置实现
4.1 机架的结构设计
根据气罐在气密性检测时的规格标准及要求,本研究用Pro/E设计了一套气密性检测装置。气密性检测装置的机械结构如图9所示[10]。
设备运行的具体步骤是:①把气罐放在A平台上,启动A平台上的气缸,实行定位、夹紧、堵孔等步骤;②将A平台沉入水中检测的同时,B平台上安装气罐;③等A平台上的气罐检测好后,A平台往上运行离开水缸向左平移,B平台跟进到中间工位;④B平台沉入水中检测,A平台在左工位拆卸气罐;⑤A平台上再次安装第2个待检测气罐等待下一步的安装。如此往复运行,提高工作效率。
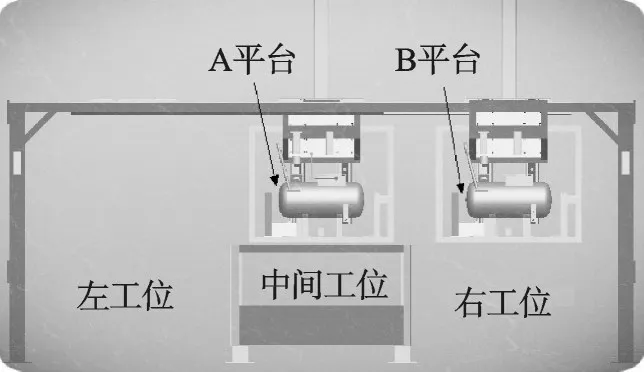
图9 气密性检测装置的机械结构
4.2 压力容器的定位和堵孔
压力容器是以一种成品的形式进行检测的,其固定的形状,给堵孔、定位工作造成了一定的困难。其形状如图10所示。

图10 待检压力容器
从图10中可以看出,气罐有3个气孔,具体定位堵孔步骤是:①把压力容器放上检测架;②右边的气缸顶住容器使其不能左右移动;③环向定位气缸运行,利用环向定位板夹住压力容器下方的圆柱型支脚使容器不能周向转动;④上压气缸运行将压力容器压紧使其不能上下运动,至此,完成压力容器定位步骤;⑤下气缸运行将压力容器下面的孔堵上;⑥斜角气缸运行将压力容器斜侧面的孔堵住;⑦上气缸压下并向压力容器内充入气体,至此,完成压力容器堵孔步骤。
气缸组件安装图如图11所示。
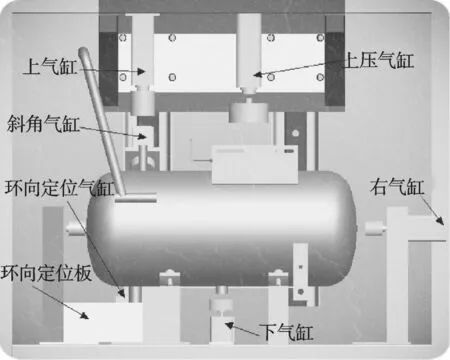
图11 压力容器定位示意图
5 结束语
本研究介绍了基于Horn-Schunck光流图像处理算法的水中气泡的气密性检测方法,设计了一套气密性检测装置。该装置克服了压力容器自动堵孔、定位的难点,初步实现了压力容器半自动化的装卸和气密性检测,提高了工作效率。通过实验采集气泡以及对气泡图像处理后,其研究结果表明:此系统可准确检测的最小气泡直径为4 mm。气泡检测最适合的直径在8 mm左右。如气泡直径继续增大,气泡表面不规则程度加深,检测精确度变得越低。验证了方法的可行性。
未来的工作将集中于提升气密性装置的全自动化改造以及提高光流法检测气泡的精确性和抗干扰能力。
(References):
[1]彭光正,纪春华,葛 楠.气密性检测技术现状及发展趋势[J].机床与液压,2008,36(11):173-174.
[2]吴孝俭,闫荣鑫.泄漏检测[M].北京:机械工业出版社,2005.
[3]王红一,董 峰.基于高速摄像的水中气泡运动特性的研究[C].青岛:中国工程热物理学会2008多相流学术会议,2008.
[4]ZIELINSKI O,SAWORSKI B,SCHULZ J.Marine bubble detection using optical-flow techniques[J].Journal of the European Optical Society,2010(5):1-5.
[5]SAMET N,MARÉCHAL P,DUFLO H.Ultrasound monitor⁃ing of bubble size and velocity in a fluid model using phased array transducer[J].NDT&E International,2011,44(7):621–627.
[6]BEAUCHEMIN S S,BARRON J L.The computation of opti⁃cal flow[J].ACM Computing Surveys(CSUR),1995,27(3):433-466.
[7]HORN B,SCHUNCK B G.Determining optical flow[J].Artificial Intelligence,1981,17(1-3):185-203.
[8]梁法春,陈 倩,曹学文.图像处理技术在长气泡气液界面检测中的应用[C].青岛:中国工程热物理学会2008多相流学术会议,2008.
[9]高 成.Matlab图像处理与应用[M].北京:国防工业出版社,2007.
[10]张建民.机电一体化系统设计[M].北京:高等教育出版社,2007.
猜你喜欢
汽车工程师(2021年12期)2022-01-17
新潮电子(2021年7期)2021-08-14
建材发展导向(2021年13期)2021-07-28
科学与财富(2021年34期)2021-05-10
装备制造技术(2020年12期)2020-05-22
数理化解题研究(2019年22期)2019-08-26
儿童故事画报·发现号趣味百科(2019年9期)2019-02-02
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年18期)2018-11-14
电气化铁道(2016年4期)2016-04-16
