
基于模糊PID的飞机液压助力器系统动态仿真
2013-09-12 09:08王平军李昌范李彦波
组合机床与自动化加工技术 2013年5期
熊 宽,王平军,李昌范,李彦波
(空军工程大学航空航天工程学院,西安 710038)
0 引言
液压助力器是一种机液伺服机构,是现代飞机操纵系统不可缺少的组成部分,它能够帮助飞行员用很小的力来操纵有大载荷作用的舵面偏转[1-2],而其动态特性是实现飞机良好操纵品质的基本保证,也是衡量飞机助力操纵系统设计水平的重要技术指标。因此,对助力器的研究成为一项重要的课题。传统的PID控制虽然能获得较高的稳态精度和动态特性,但由于液压助力器受温度、负载等参数变化影响较大,因此在控制性能高的场合往往达不到理想的控制效果。常规模糊控制不具有积分环节,在运行时存在着稳态误差,因此难以达到较高的控制精度[3]。本文针对液压助力器对控制性能的要求,将PID控制策略引入模糊控制,提出模糊+PID复合控制策略,最终利用Simulink完成飞机液压助力器系统的计算机仿真。
1 液压助力器的数学模型和方块图
液压助力器是一种具有负反馈的位置伺服机构,飞机上各个助力器的具体结构不尽相同,我们仅以典型液压助力器为例进行建模与仿真。典型液压助力器的基本模型[2,4]如图 1 所示。
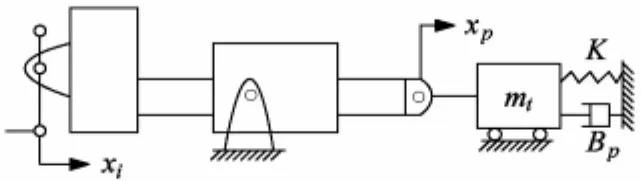
图1 助力器的基本模型
图中,xi为助力器的输入量,xp为输出量,mt为惯性系数,Bp为阻尼系数,K为弹性系数。为确立助力器的输入输出关系,建立助力器各环节的线性化方程如下:
(1)摇臂环节
摇臂环节反映了输入量xi与输出量xp以及两者形成的误差量xv三者的关系,这一关系可表示为:

式中:ni为输入比,nf为反馈比。
其拉氏变换为:

(2)阀控活塞环节
该环节的动态微分方程可表示为:

其中:KQ为流量增益,KC为流量压力系数,pL为负载压差,V0为活塞的有效容积,EL为弹性模量,Ap为活塞的面积。
弹性力是由空气动力简化而成的,空气动力与舵面偏角成正比,具有弹簧力的特征,所以称为气动弹性力。经拉氏变换后得:

助力器的结构方块图如图2所示。
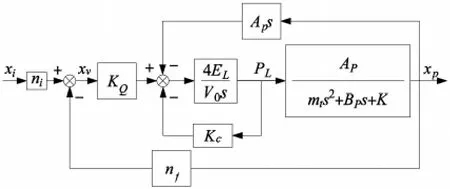
图2 助力器的结构方块图
(3)助力器传递函数
图2所示的结构方块图可以简化为图3所示的方块图。
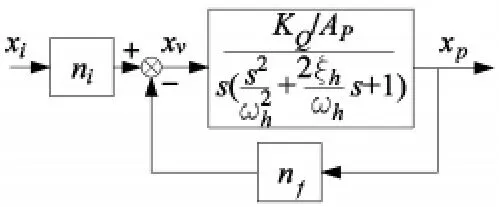
图3 简化后的助力器结构方块图
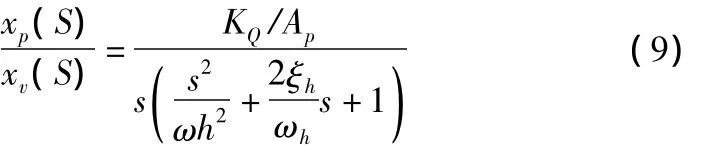
图3中,查找有关技术手册取 ni=1.5,nf=1.5,,ωh=80Hz,ξh=0.08,可得助力器传递函数为:

2 模糊+PID控制器的设计
2.1 模糊+PID控制器的结构
采用模糊+PID算法,即在大范围内采用模糊控制,以提高系统的动态响应速度;在小范围内采用PID控制,以提高系统的稳态控制精度。通过调整各项参数,使系统达到最优,即响应速度快、控制精度高。本控制系统采用模糊和PID复合控制,在小偏差时转化为PID控制,这样就获得了比纯模糊控制更高的稳态精度,有比PID控制更快的动态响应和更小的超调量[5]。模糊+PID控制系统结构如图4所示,当|e|>e0时,采用模糊控制;当|e|<=e0时,采用PID控制。其中e0为误差的阈值。
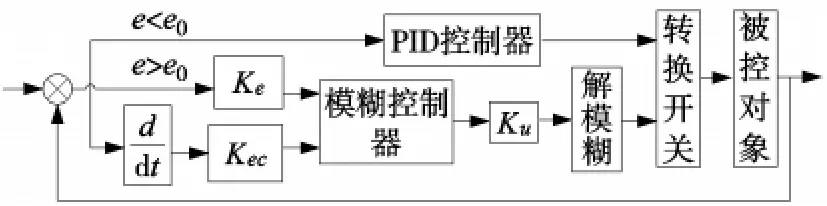
图4 模糊+PID控制系统结构图
2.2 控制规则的建立及隶属度函数的确定
选取位置的误差e和误差的变化ec作为模糊控制器的输入变量,选择位移量U作为模糊控制器的输出变量,采用二维模糊控制器。设定误差和误差变化的基本论域为{-3,3},设定输入、输出的模糊集均为:{NB(负大),NM(负中),NS(负小),ZO(零),PS(正小),PM(正中),PB(正大)},其控制规则如表1所示,根据要求,给出三个模糊变量的隶属度函数曲线[6-7],如图5所示。
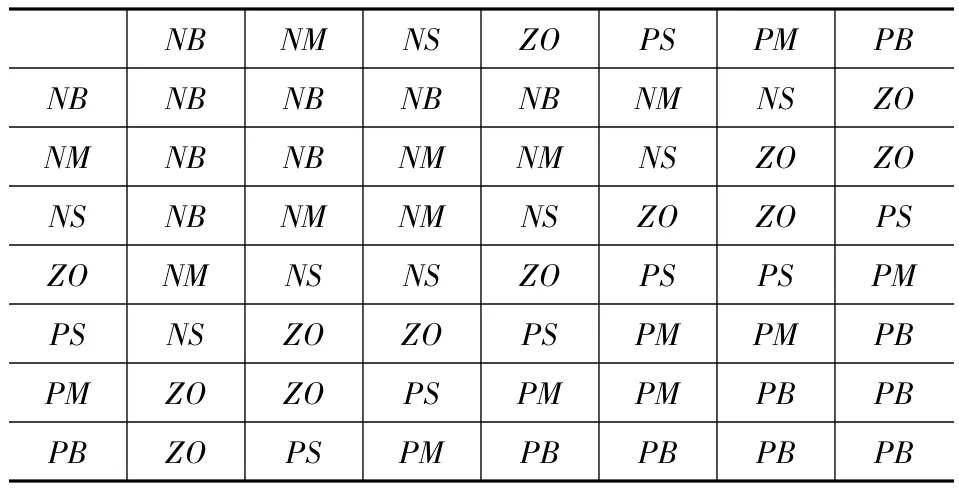
表1 模糊控制规则表
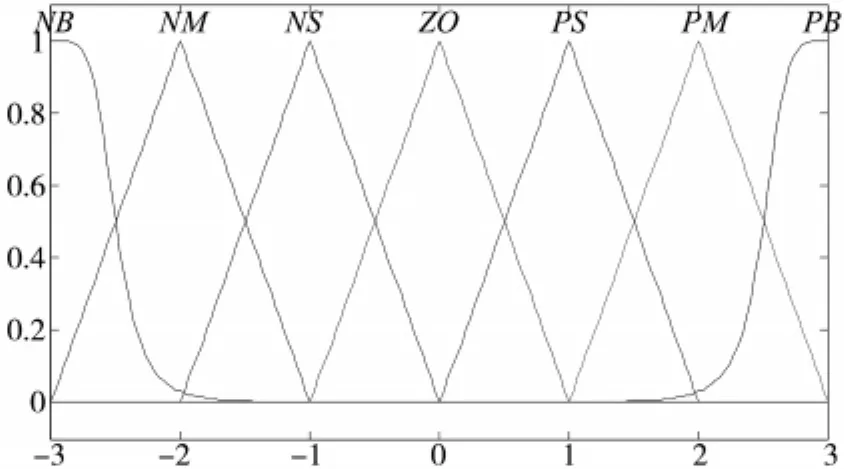
图5 e、ec及U的隶属度函数图
3 控制系统的仿真分析
3.1 PID控制的仿真分析
助力器在Simulink中的 PID整定结构图[8-9]如图6所示。
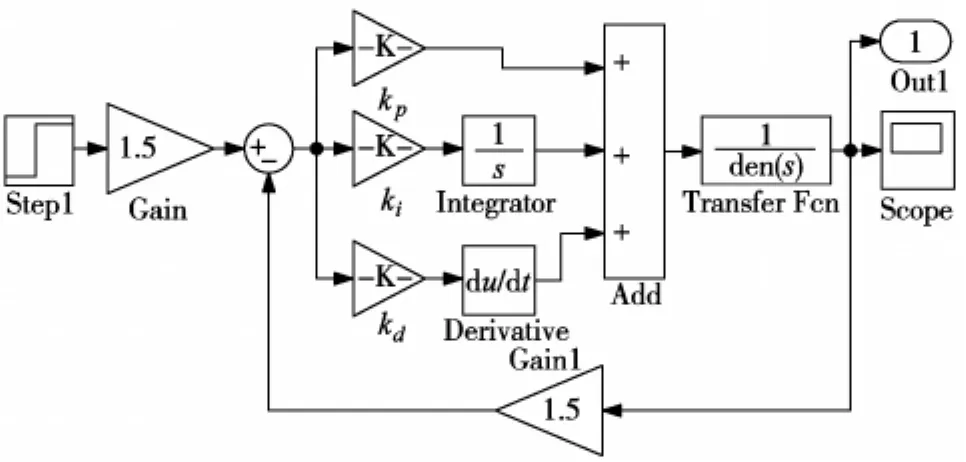
图6 PID控制的Simulink仿真结构图
在图6中,先令Ki=Kd=0,调整 Kp的大小,直到得到等幅振荡时为止。可得Kp=8.55,Tk=0.08s,从而得到整定后的参数 Kp=5.12,Ti=0.5Tk=0.04s,Td=0.125Tk=0.01s。将得到的参数在经过调试修正后得到:Kp=1.5,Ki=0.02,Kd=0.03。PID控制的助力器单位阶跃响应曲线如图9所示。
3.2 模糊+PID控制系统的仿真分析
由建立的助力器方块图可知,外回路增益相当于比例控制器,因此可以将助力器系统看成是比例控制。由系统方块图及模糊+PID控制结构图可以建立图7所示的助力器模糊+PID控制的Simulink仿真结构图[6,10]。图8为fuzzy的封装结构图。取误差的量化因子Ke=3及误差变化的量化因子Kc=0.5,取输出控制量的比例因子Ku=0.8。设置仿真求解器为ode3,仿真时间为10s,最大仿真步长设置为0.005,其他参数取系统默认值。
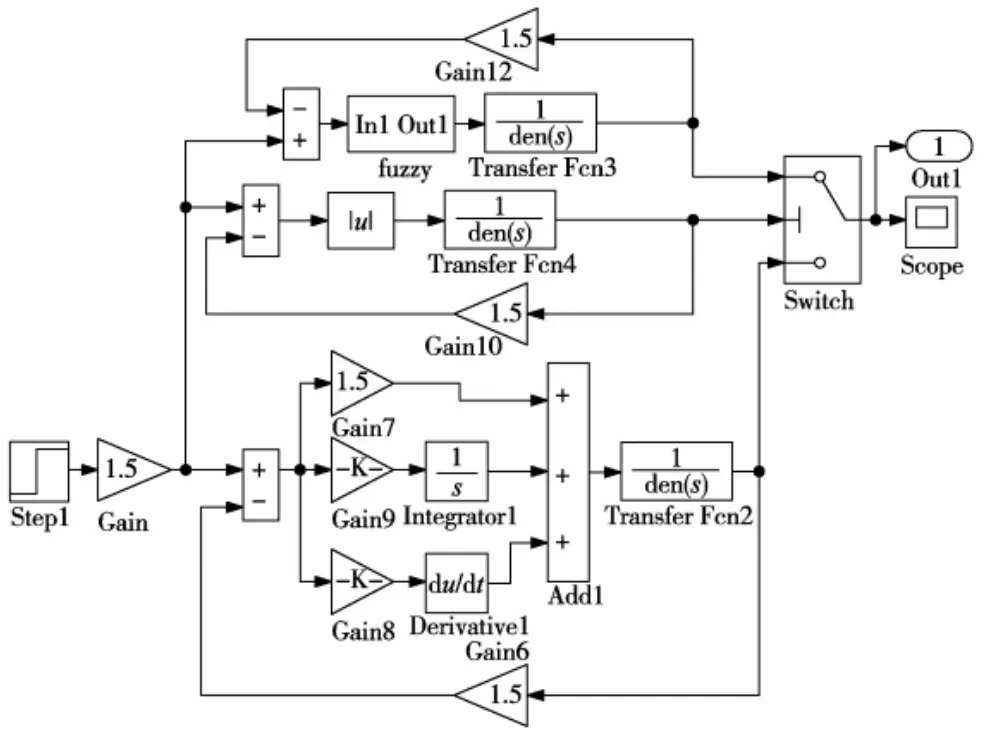
图7 模糊+PID控制的Simulink仿真结构图
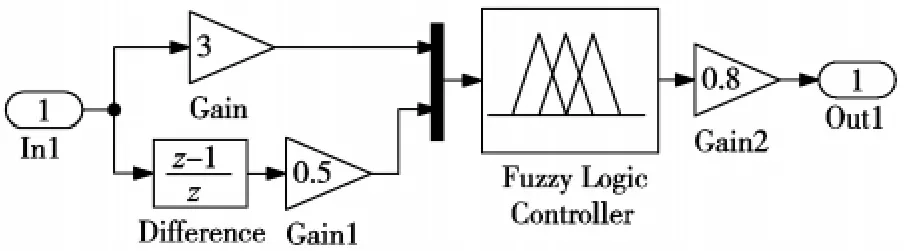
图8 fuzzy的封装结构图
从图9所示的模糊+PID控制的助力器单位阶跃响应曲线可以看出,模糊+PID控制具有较好的动态性能和较短的调节时间。模糊+PID控制、PID控制、P控制在助力器系统达到稳定时的时间分别为1.8s,3.2s,4.3s。
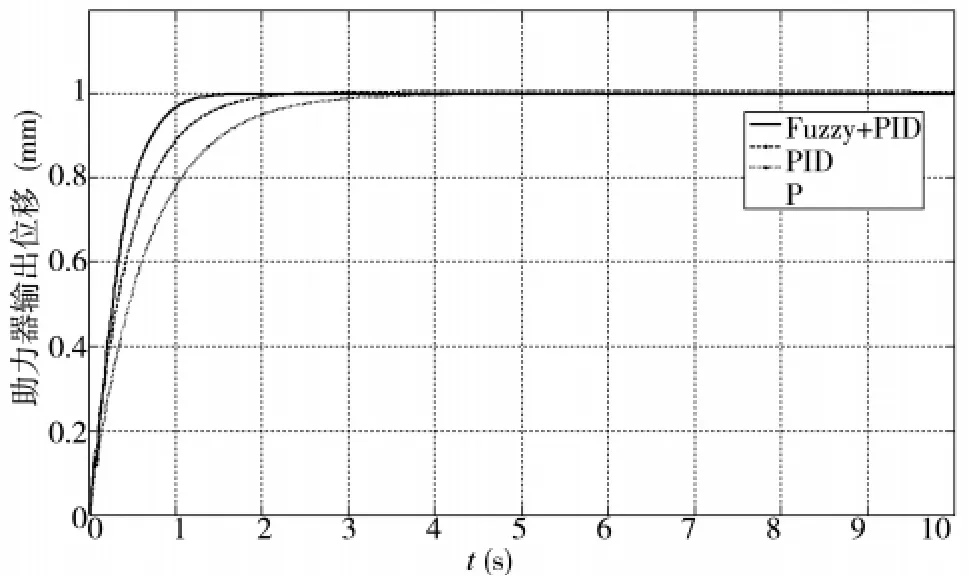
图9 助力器单位阶跃响应曲线
为测试助力器系统对扰动信号的抑制能力,在建立的模糊+PID控制模块上施加一单位阶跃扰动信号,其Simulink仿真模块图如图10所示。得到的单位阶跃响应曲线如图11所示,从图中可以看出,在5s时受到扰动信号后,模糊+PID控制在5.9s即达到稳定,而 PID控制和比例控制分别为6.8s,7.7s,故而模糊控制+PID在抗干扰方面效果还是比较显著的,能够有效起到保护助力器的作用。

图10 施加干扰的模糊+PID控制的Simulink仿真结构图
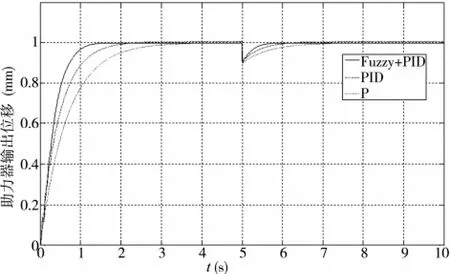
图11 施加干扰的助力器单位阶跃响应曲线
4 结论
由于飞机助力器系统是一个非线性系统,使用常规的控制方法很难得到满意的效果,而模糊+PID控制具有模糊控制和PID控制的双重优点,可以较好的完成助力器系统的控制。仿真结果表明:在单位阶跃信号的作用下,与PID控制和P控制相比,模糊+PID控制具有很好的动态性能,能够较明显的提高系统的快速性和抗干扰能力,提高了飞机助力器系统的综合性能,对保证飞行员及时准确操纵飞机有着重要的帮助作用,具有较强的应用前景。
[1]王占林,李培滋.飞机液压传动与伺服系统[M].北京:国防工业出版社,1980.
[2]沈燕良.飞机系统原理[M].北京:国防工业出版社,2007.
[3]靳宝全.基于模糊滑模的电液位置伺服控制系统[M].北京:国防工业出版社,2011.
[4]郭辉,王平军,郭涛.基于Simulink的飞机液压助力器建模与仿真研究[J].机床与液压,2007,35(9):222-223.
[5]周润景,张丽娜.基于MATLAB与fuzzyTECH的模糊与神经网络设计[M].北京:电子工业出版社,2010.
[6]贾文铜,周瑞祥.基于模糊-PID的飞机平尾舵机伺服系统动态仿真[J].空军工程大学学报,2011(5):45-48.
[7]陈杰.MATLAB宝典[M].北京:电子工业出版社,2007.
[8]刘金琨.先进PID控制MATLAB仿真(第三版)[M].北京:电子工业出版社,2011.
[9]黄永安,马路,刘慧敏.MATLAB 7.0/Simulink 6.0建模仿真开发与高级工程应用[M].北京:清华大学出版社,2008.
[10]陶永华.新型PID控制及其应用[M].北京:机械工业出版社,2002.
猜你喜欢
浙江共产党员(2022年10期)2022-11-23
汽车实用技术(2022年12期)2022-07-05
新技术新工艺(2022年1期)2022-03-04
化工自动化及仪表(2021年6期)2021-11-26
军民两用技术与产品(2021年8期)2021-11-24
电子技术与软件工程(2020年17期)2020-02-02
中学生数理化·高一版(2019年3期)2019-04-15
科技与创新(2018年12期)2018-11-29
浙江共产党员(2017年11期)2017-11-15
自动化仪表(2017年8期)2017-08-30
