
基于惯性动作捕捉的多螺旋桨飞行器姿态研究
2013-09-11 00:56韩立龙赵正旭
河北省科学院学报 2013年2期
韩立龙,赵正旭
(石家庄铁道大学 信息科学与技术学院,河北 石家庄 050043)
伴随着动作捕捉技术的不断进步和发展,其应用范围也得到了不断扩展。目前,动作捕捉技术已被应用于教育教学、医学研究、航空航天、步态分析、非物质文化遗产保护、影视创作等诸多领域[1,2]。进入21世纪后,国内外的直升机技术飞速发展,并在军用、民用的诸多领域得到广泛的应用,例如,侦查、监视、目标获取、通讯中继等[3]。但目前直升机仍存在操作复杂、飞行不稳、抗毁性差、飞行员无法弹跳逃生等诸多问题。针对于此,笔者将惯性动作捕捉技术应用于多螺旋桨飞行器的设计与姿态研究,通过对捕捉的各个螺旋桨的姿态数据的处理,以实现对于该飞行器的姿态控制。多螺旋桨飞行器可使得目前的直升机操作更加简便,飞行器的姿态控制更加平稳,同时能够保障飞行员的安全弹跳逃生,即便在中心控制器损毁或多个螺旋桨损毁的条件下,仍能够平稳降落,具有高机动性、抗毁性、可组装性、高安全性等特点。
1 多螺旋桨飞行器

图1 德国多螺旋桨飞行器
目前,由于飞行器直升机存在尾梁停放面积过大,发生碰撞的危险性较高,悬停状态不稳定等问题,人们已把目光投向了多螺旋桨飞行器的设计与研究,比较成功的案例如美国的支奴干大型运输直升机(纵列式双旋翼直升机),俄罗斯的卡式系列武装直升机(共轴式双旋翼结构),以及在研的德国16螺旋桨飞行器(如图1所示)等。但由于操纵复杂,稳定性差等问题,这些直升机在投入使用后存在安全系数低,可靠性差等问题。
近年来,针对于飞行器的运动姿态研究,广泛采用的方法有基于立体视觉的测量研究方法、基于激光跟踪测量仪的测量研究方法,基于IGPS(室内GPS)的姿态测量研究方法等。其中基于立体视觉的研究方法和基于IGPS的研究方法由于受到空间环境地影响,不利于大范围应用;而基于激光跟踪测量仪的测量方法则因为设备昂贵、技术方法复杂等因素,也未能得到大范围应用。且三种方法均存在对目标的跟踪性能差、测量精度不高、缺乏自适应能力等问题。
2 动作捕捉技术(Motion Capture)
2.1 动作捕捉技术
动作捕捉技术,在国外也称为运动捕捉技术,于20世纪70年代末,由心理学家Johansson G[4]在MLD(Moving Light Display)实验中提出,在20世纪80年代、90年代期间,经过众多学者的研究和推动,动作捕捉技术已日趋发展成熟。近些年,动作捕捉技术更是取得了突飞猛进的发展,并逐渐走向商业化。目前,该技术已被广泛的应用于数字化保护、游戏、人体工程学研究、动画制作、手语制作、影视、航天航空、机器人、步态识别分析、模拟训练、虚拟现实、医学研究等领域当中,并已成为众多领域当中的关键技术之一,极大地方便了广大学者的科学研究工作。
动作捕捉技术,可定义为利用摄像机、照相机、传感器或是其他的动作捕捉设备等具有记录功能的电子设备,在时域上跟踪一些关键点的运动,来对物体的运动姿态进行记录和保存,再对数据进行分析处理的一个过程。从本质上说,动作捕捉技术就是利用传感器或标记点记录和跟踪物体在空间中的运动轨迹,并通过具体的数据来表述该运动的一个过程[1]。
动作捕捉设备主要包括四个部分:传感器、信号捕捉设备、数据传输设备、数据处理设备。
(1)传感器:固定于物体身上,可感知外界信号,并将感知到的数据传送给终端处理器处理;
(2)信号捕捉设备:负责获取捕捉物体的相关信息;
(3)数据传输设备:负责将捕获的数据从动作捕捉系统传输至终端处理器;
(4)数据处理设备:对捕获的数据进行处理,实现数据的再利用。根据工作原理的不同,可将动作捕捉技术分为五类:机械式动作捕捉、声学式动作捕捉、电磁式动作捕捉、光学式动作捕捉和基于视频的动作捕捉。
2.2 3DSuit惯性动作捕捉系统
3DSuit惯性动作捕捉系统融合了导航系统与角定位系统,采用Innalabs Joints II算法,通过数据处理设备实时处理捕获到的数据进行,计算出各个螺旋桨所在的位置和运动方向,并通过无线蓝牙技术实时地将数据传输至终端处理器。其核心元件为:Inertial Labs OSv3惯性传感器,信号捕捉设备,数据传输设备(采用蓝牙技术和USB接口技术传输),数据处理设备,如图2所示。

图2 3DSuit动作捕捉传感器
Inertial Labs OSv3惯性传感器,基于MEMS的三轴陀螺仪,加速度计和磁强计3种类型的传感单元,是针对动作捕捉技术以及确保有人或无人操作设备的稳定性等实时应用而设计,其依赖于地球重力场和磁场,适用范围广。
Inertial Labs OSv3传感器内部更新率为500Hz,能够满足小型多螺旋桨的采样需求。
3 多螺旋桨飞行器姿态研究方案
利用3DSuit的实时性强,Inertial Labs OSv3惯性传感器能够捕获物体的空间位置和运动方向变化等信息的特点,将Inertial Labs OSv3惯性传感器用于捕获多螺旋桨直升机中各个螺旋桨运动姿态,并将捕获的原始惯性传感器数据传输给终端控制器;终端控制器根据采集的数据对飞行器的运动姿态进行分析,并利用姿态调整算法,调整各个螺旋桨的转速,进而使多螺旋桨飞行器能够平稳的,安全的飞行。
3.1 方案设计
多螺旋桨直升机中,每个螺旋桨由单独的边缘控制器进行控制,并且由单独的动作捕捉传感器对螺旋桨的运动姿态进行捕捉,如图3所示。
多个螺旋桨通过中心连接装置组合在一起,构成飞行器的动力部分,螺旋桨的布局可根据需要灵活调整。中心控制器位于中心连接装置上,是整个飞行器的重心,通过与各个传感器建立连接,收集各螺旋桨的运动姿态数据,数据处理后,向各边缘控制器发出指令,进而控制各个螺旋桨的转速。

图3 多螺旋桨飞行器方案设计
3.2 多螺旋桨运动分析
多螺旋桨直升机中螺旋桨的个数是成对出现的,可根据需要进行随机组合,且在空间几何上呈现均匀分布的特点。同轴的两个螺旋桨的转动方向正好相反,以便于相互抵消反扭力矩。
各传感器在飞行器起飞之前要相对于中心控制器进行校正,除了自身的水平校正外,还要以中心控制器为中心,进行位置和水平的校正。在飞行过程中,调整中心控制器的的倾角就意味着整体坐标系发生了倾斜,各个螺旋桨的传感器就会感知飞行器(即螺旋桨)发生了倾斜;根据调整算法,参照自身的空间位置对所控的螺旋桨进行转速调整。使得螺旋桨在当前坐标系中保持水平,实现飞行器的平稳飞行。如图4所示。
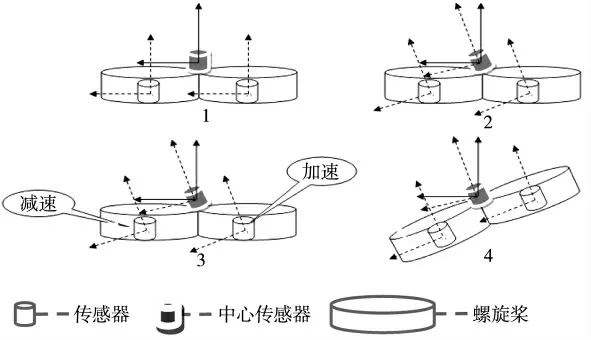
图4 多螺旋桨滑移、转向图
a、当各个螺旋桨的转速相同并且提供的升力之和等于机体的重力时,飞行器处于悬停状态;
b、当等量的增大或减小各螺旋桨的转速时,飞行器处于上升或降落状态;
c、当同轴的螺旋桨转速以相同的加速度增大或减小时,造成减速度的不平衡,实现飞行器的旋转;
d、当改变某一螺旋桨的转速,或根据三角形法则以等加速度的改变某几个螺旋桨的转速时,使得螺旋桨产生的垂直方向的推力不平衡,导致机体倾斜,从而产生沿某一水平方向的推力,实现飞行器沿各个方向的水平移动。
3.3 数据采集与姿态研究方案
根据所提出的基于惯性动作捕捉的多螺旋桨飞行器的运动姿态研究方案,利用3DSuit惯性动作捕捉系统对飞行器进行数据采集,具体数据格式如下所示:
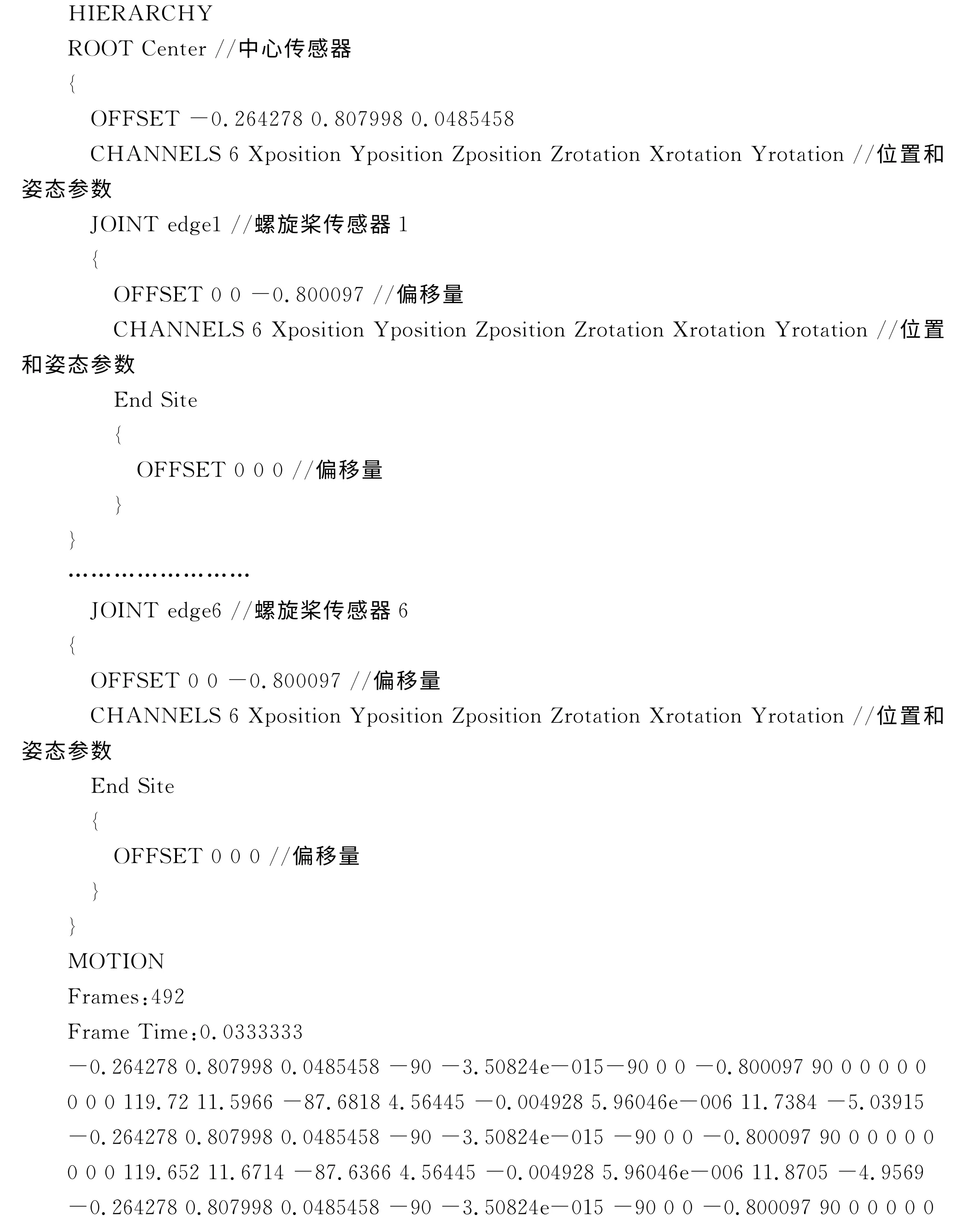
采集的数据以.bvh文件形势存在,“.bvh”信息块以“HIERARCHY”开头,接着是“Root”表示中心节点,接下来是Root的子节点,用关键字“JOINT”标识,“OFFSET”表示气候连接点相对于父节点的偏移量信息,此结构中,各螺旋桨的偏移数据相对于其父节点(Center)是相同的,“CHANNELS”标识文件数据的6通道,表示各节点的位置信息和运动方向信息。通过六个边缘姿态求得的平均姿态与中心姿态再求平均,得到飞行器的飞行姿态。
利用3D Max 2013建立多螺旋桨飞行器(本文采用六螺旋桨为例)虚拟模型(如图3左侧所示),然后将该模型导入安装有3DSuit插件的Motionbuilder软件中,并按照图3右侧所示,将传感器固定到多螺旋桨飞行器上,以用来采集数据。并将采集到的数据导出为.bvh文件格式。从.bvh文件中提取各个螺旋桨及中心控制器的飞行姿态数据,利用这些数据对飞行器的飞行姿态进行动力学分析、运动学分析、时空分析,进而对飞行器的平移速度、升降速度、各个螺旋桨转速与飞行器飞行姿态四者之间的关系进行研究。
通过该研究,能够得到各螺旋桨的转速对飞行器的运动姿态的影响,将有利于今后通过终端控制器,控制各螺旋桨的转速,进而保持飞行器的处于良好的运动姿态的研究工作。
4 结论
将惯性动作捕捉技术,应用于多螺旋桨飞行器的设计与运动姿态分析,使得飞行器的操作更加简便,可靠性更高。多螺旋桨飞行器的实现算法简单,只需确保传感器所控的螺旋桨水平即可,实际上只需控制螺旋桨的转速。该飞行器结构简单,没有转向装置,转向是通过中心控制器调整螺旋桨转速实现。多螺旋桨飞行器具有极强的抗毁性能,单个或多个螺旋桨损毁时,仍可安全飞行;当中心控制器损毁时,单个螺旋桨仍有能力保持自身水平,最终使得飞行器保持水平,并平稳降落。本文通过对基于惯性动作捕捉技术的多螺旋桨飞行器的姿态进行研究,利用一个中心姿态和六个边缘姿态数据的平均值,求得飞行器的运动姿态,并对其运动姿态和螺旋桨的转速之间的关系进行了探讨。该设计的多螺旋桨直升机,可根据需要自由组装,连接方便,适用于小型航拍、侦察监视等,亦可应用于大型运输。同时该设计还可保证有人状况下,飞行员的安全弹跳逃生。
[1]戴欢.基于惯性动作捕捉的人体运动姿态研究[D].石家庄:石家庄铁道大学,2011.
[2]向泽锐,支锦亦,徐伯初,李娟.运动捕捉技术及其研究综述[J].计算机应用研究,2013-04-17.
[3]李鹏,张守权.无人直升机控制系统探索[J].自动化技术与应用,2012,31(4):16-19.
[4]赵正旭,戴欢,赵文彬,袁洁.基于惯性动作捕捉的人体运动姿态模拟[J].计算机工程,2012,38(5):5-8.
[5]刘志军,吕强,王东来.小型四旋翼直升机的建模与仿真控制[J].计算机仿真,2010,27(7):18-20.
[6]盛守朝,王道波,姜斌,赵超.一种无人直升机自动期间起降控制策略[J].航空学报,2010,31(2):363-367.
[7]赵正旭,戴欢,赵文彬,袁洁.基于惯性动作捕捉的人体运动姿态研究[J].计算机工程,2012,38(12):1-4.
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21
凤凰动漫(军事大王)(2022年1期)2022-04-19
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
航空发动机(2020年3期)2020-07-24
电子制作(2018年2期)2018-04-18
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
兰台世界(2017年10期)2017-06-01
小学科学(学生版)(2016年1期)2016-10-09
小朋友·快乐手工(2015年5期)2015-06-06
中国舰船研究(2014年1期)2014-05-14
