
环保树墙修剪机设计
2013-09-04 08:36陈延伟王占礼张自强庞在祥
长春工业大学学报 2013年1期
陈延伟, 王占礼, 张自强, 庞在祥
0 引 言
现在城市绿化的要求越来越高,树墙作为其中的一部分以其成本低廉、整齐美观发挥了重要的作用,但同时随着树木枝叶的生长,树墙顶端也变得参差不齐,再加上树墙位置和形状的约束,因此,树墙修剪对工人要求具有较高的操作水平和经验[1-2]。
传统的修剪工具手持汽油机式“绿篱剪”,在实际应用过程中会产生以下几个弊端:首先,汽油机会产生很大的噪音污染,“绿篱剪”工作时的噪音可达到95dB以上;其次,汽油机排出大量的尾气还会对大气有很大的污染;第三,工人在用“绿篱剪”作业时,必须由人手持边行走边修剪,带来繁重的劳动强度[3-4]。根据国内外环卫机械的实际情况及环卫部门实际工作需求[5-6],我们设计了一款操作简便、成本低廉、能耗低、噪音小的自动树墙修剪设备,该设备大幅地降低了工人的劳动强度、改善了工人的劳动环境,实现了绿色环保的城市建设要求,为城市环卫机械化贡献微薄力量。
1 环保树墙修剪机的工作机理及总体设计
1.1 修剪机工作机理[7]
环保树墙修剪机是根据环卫工人实际工况,深入分析了树墙修剪操作的工况及流程,其传统的修剪方法是由工人师傅手持汽油机式“绿篱剪”进行修剪,在实际应用过程中有上述的几个弊端。
所设计的树墙修剪机是利用电动车作为工作平台,工作过程中,每个行程完成一个树墙平面的修剪,然后通过改变刀具的工作位置再次行走完成下一个平面的修整。该装置采用机械手臂的方式来实现修剪刀具的定位,进而可对不同倾斜角度的树墙进行修剪。与此同时,通过调节水平臂的伸缩和垂直臂的升降,来完成对不同规格树墙的修剪。
1.2 总体设计
1.2.1 设计目标
利用机电结合的绿色环保设计理念,将传统的树墙修剪工作用树墙修剪设备来实现,其目的是将环卫工人从繁重的修剪劳动中解脱出来,同时改善其工作环境,降低能耗和污染,制定以下设计目标:
1)原动机选择直流电机,动力源选择蓄电池作为首选,条件允许的情况下配备太阳能电池板。
2)实现工作面不同宽度的适应性调节。
3)实现不同高度的适应性调节。
(四)结构扁平,领导管理要求高。省军区系统重组重塑后,体制结构更加扁平,人员编成更加精干,对领导管理工作提出新的更高要求。由于省军区单位点多线长面广,且驻地相对分散,管理对象既有军官、士兵、文职人员和职工,还有专武干部和离退休干部,人员多样、成分复杂,领导管理任务重、压力大。因此,过去那种事无巨细“一竿子插到底”、大包大揽“保姆式”的领导管理方式显然已不适用,必须打破传统思维,跳出固有模式,创新理念方法,建立更加科学高效的领导管理和工作指导体系。
4)实现工作面任意角度的修剪。
5)实现残枝叶的自动回收,提高工作效率。
6)实现较高的平面度和垂直度的修剪。
7)实现电动车的行走,使工人可以开车工作,从而降低工人的劳动强度。
1.2.2 机械结构设计
根据以上设计目标,将环保树墙修剪机的总体设计划分为5大模块,即:
1)树墙的修剪机构;
3)绿篱剪工作面水平伸缩机构;
4)绿篱剪工作面高度的升降机构;
5)电动小车运动机构。
树墙修剪机的总体方案如图1所示。

图1 树墙修剪机总体方案
本设备主体支撑是一辆电动四轮车;垂直升降臂17与车体固联,通过丝杠与螺母联接实现不同高度树墙的修剪功能;水平伸缩臂6通过电机带动减速器,减速器带动丝杠与螺母联接,实现水平伸缩功能,以完成不同宽度树墙的修剪;水平臂自动翻转机构4连接在水平伸缩臂7上,通过定位销来实现任意角度定位。
1.2.3 电气控制系统
本环保树墙修剪机使用的是低压直流供电,虽然工作电机的功率不大,但是其工作电流很大。如果单独启动,“绿篱剪”工作电机的启动电流达到16A,行走电机启动电流达12.5A,而直接用开关控制则会出现大弧光将开关烧毁,因此,设备中的4个电机都是由直流继电器加开关来控制实现的[8]。
继电器是一种电子控制器件,它具有控制系统(又称输入回路)和被控制系统(又称输出回路),通常应用于自动控制电路中,它实际上是用较小的电流去控制较大电流的一种“自动开关”。故在电路中起着自动调节、安全保护、转换电路等作用。“绿篱剪”电机工作时只要能开、能关即可,其主电路如图2所示。
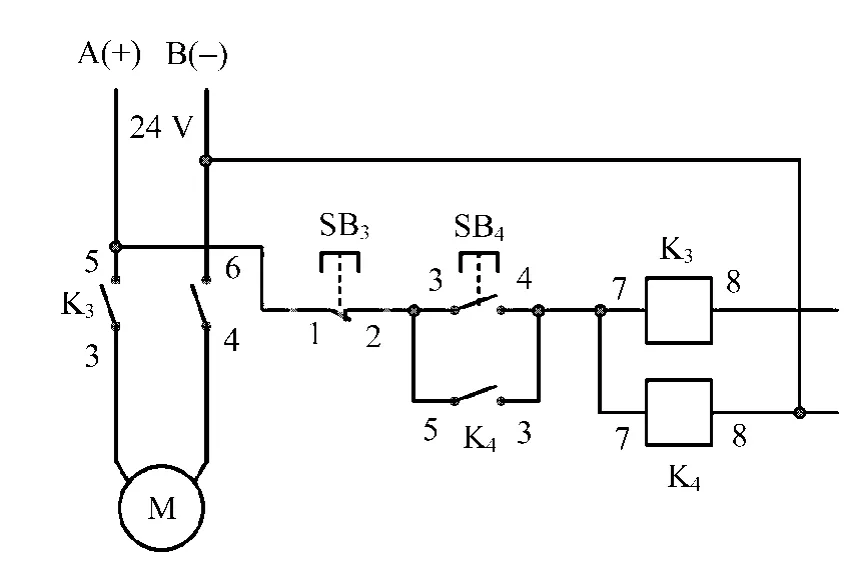
图2 “绿篱剪”工作电机控制电路
K3,K4为24V直流线圈继电器,SB3,SB4分别为锯开和锯关开关。
垂直升降、水平伸缩通过工作电机正反转来实现,其控制电路如图3和图4所示。

图3 垂直升降、水平伸缩工作电机控制电路
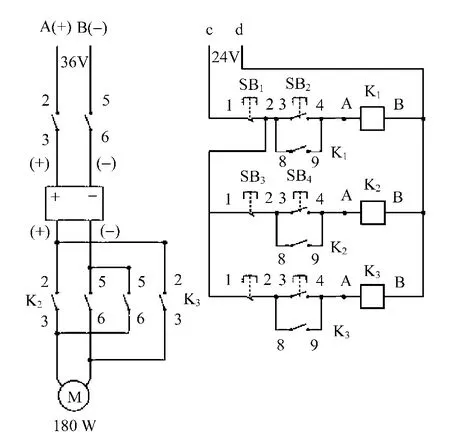
图4 行走电机控制电路
2 环保树墙修剪机的实体建模
计算机辅助设计在现代产品开发中起着非常重要的作用[9]。这是因为利用计算机辅助设计可以预先估计出它们在各种环境下的表现,并且速度快、成本低。设计师可以通过计算机软件迅速确定方案,合理地选择参数。对环保树墙修剪机的三维建模是项目进行过程中不可缺少的环节。其目的是在设计时能够直观地反应环保树墙修剪机的本体,预测其性能并进行合理优化。由于环保树墙修剪机结构复杂,因此,使用三维建模与仿真模拟确定环保树墙修剪机结构方案是非常必要的。
项目设计的环保树墙修剪机主要有4大模块组成,分别是行走小车、竖直升降机构、水平伸缩机构和绿篱剪运动机构。在三维绘图软件Solid-Works中对所选零部件进行三维建模,并在其中采用模块化设计,即采用单个模块进行设计和装配,最后组装到一起。这样设计既有利于查看各部之间的配合,也有利于各模块之间的拆装,缩短设计时间。各模块的装配图如图5~图9所示。
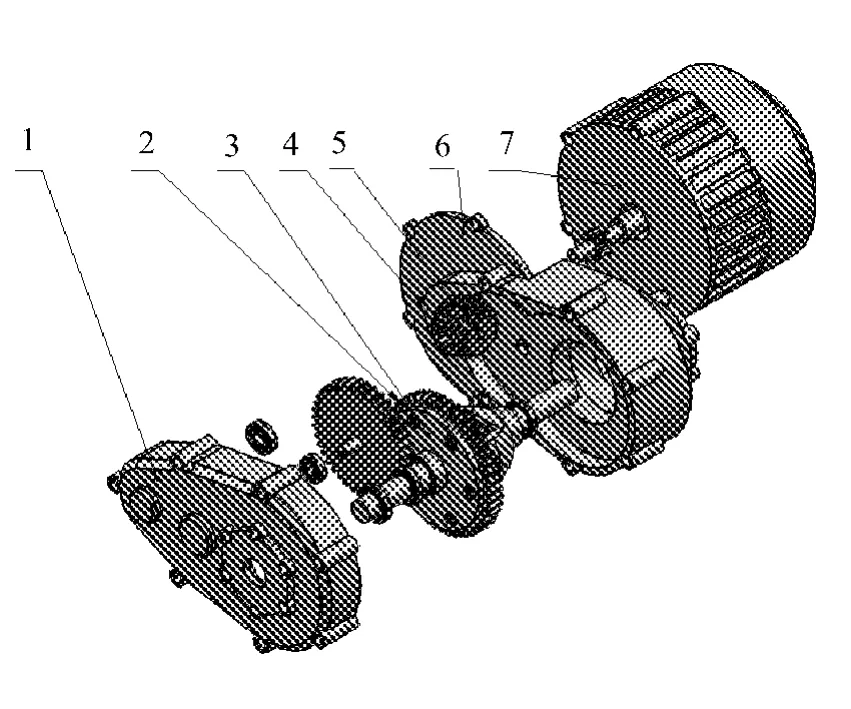
图5 差速电机装配示意图
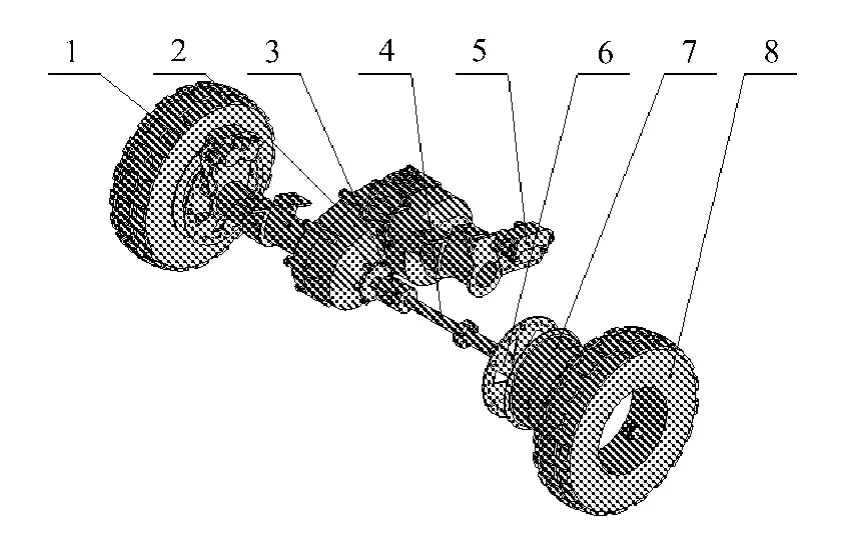
图6 电动车驱动桥装配示意图
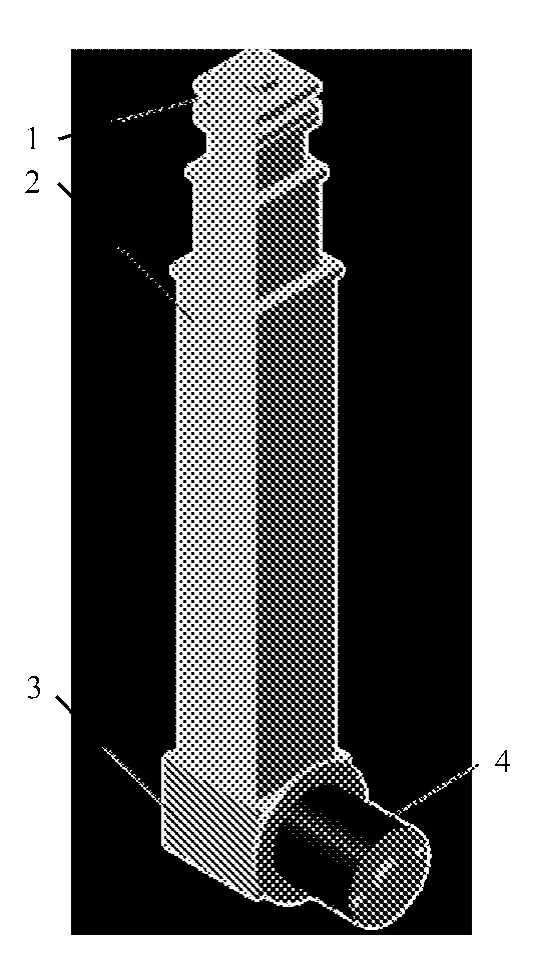
图7 垂直升降臂机构装配示意图
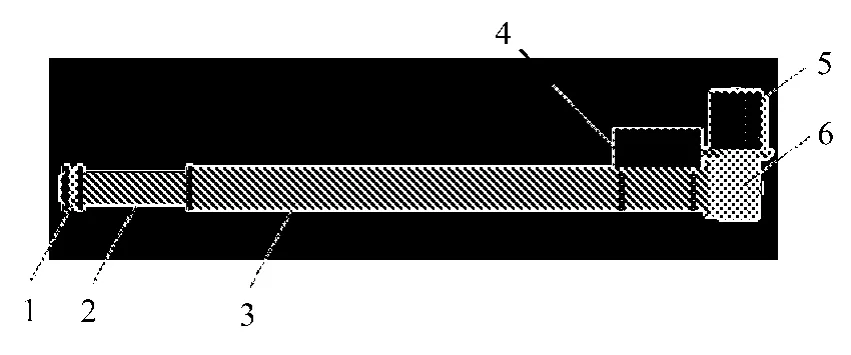
图8 水平伸缩机构装配示意图

图9 绿篱剪运动机构爆炸示意图
利用SolidWorks三维建模软件,对环保树墙修剪机各个模块进行三维建模,实现了树墙修剪机整机模型化与自上而下的环保树墙修剪机的虚拟装配。为树墙修剪机的仿真分析提供样机模型,为环保树墙修剪机的优化设计提供了基础和借鉴。
3 结 语
环保树墙修剪机完全是以机械代替了人力劳动,大大减少了工人的劳动强度;当今世界“电能”的产生来源十分广阔,属于清洁能源,采用可再生的“电能”充当动力源。在环境保护方面解决了噪音和尾气污染,在工作时电动机设备产生的噪音不到40dB,完全符合环保要求。而且该装置不会产生任何尾气污染环境。环保树墙修剪机具有绿色环保、操作简便、人性化设计等特点。
[1] 欧阳天成,梁燕成,陈树勋.高速公路绿篱修剪机运动学仿真分析[J].装备制造技术,2012(11):36-41.
[2] 顾正平,沈瑞珍.国内外园林绿化机械现状与发展趋势[J].林业机械与木工设备,2004(2):4-6.
[3] 向北平,杨乾华.电动成型绿篱修剪机的研究[J].机械设计与制造,2008(3):98-99.
[4] 雒晓辉,赵悟,杨力超.车载式绿篱修剪机回转机构的设计与有限元分析[J].建筑机械,2011(1):99-104.
[5] 姜子良,粟田奎.我国园林机械的发展概况与建议[J].辽宁林业科技,2005(3):66-67.
[6] 孟俊焕,王卫东,刘敏.园林绿化机械设备的现状与发展趋势[J].农业装备与车辆工程,2006(1):4-5.
[7] 王伟,唐传苗,张宏,等.移动式绿篱修剪机设计[J].农业化研究,2010(6):122-155.
[8] 王颖超,郑琼林.异步电动机无速度传感器矢量控制研究[J].长春工业大学学报:自然科学版,2001,22(2):192-196.
[9] 王晖,杨慧香,潘英剑,等.斜齿轮刀计算机辅助设计研究[J].长春工业大学学报:自然科学版,2008,29(2):217-220.
猜你喜欢
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
落叶果树(2021年6期)2021-02-12
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
东坡赤壁诗词(2019年1期)2019-04-30
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
现代园艺(2017年14期)2017-02-05
能源(2016年2期)2016-12-01
