基于小型光电跟踪系统的PID控制实验
2013-09-03 07:26张佳
实验室研究与探索 2013年11期
张 佳
(北京理工大学自动化学院,北京100081)
0 引言
自动控制系统实验在高校中已经开设多年,其实验内容具有很强的专业性。由于针对不同教学内容所开设的实验内容和实验环境的需求具有很大的差别,所以目前大部分高校的自动控制实验以Matlab仿真[1]、Simulink 仿真[2]、实验箱面板连线[3]等验证性实验为主。在这些传统的自动控制实验教学过程中,实验内容陈旧[4],形式化、模式固化的现象比较严重。目前,自动化工程领域需要“宽口径、厚基础、强能力、高素质”的复合型人才,所以对实验教学过程提出了更高的要求[5]。为了提高自动控制实验教学的效果,本文设计了基于小型光电跟踪系统的PID控制实验,该实验采用先进的硬件设备与Matlab仿真软件相结合的方法,开展研究型教学[6-7],增强了实验的设计性与创新性,提高了学生的主动性,切实达到培养学生动手能力的目的。
1 光电跟踪系统
光电成像跟踪系统是集光学技术、控制技术、信息处理等多学科为一体的现代高精度跟踪系统。实时光电成像跟踪系统[8]的主要任务是从目标的图像序列中检测运动信息,估计运动及参数并给出伺服机构控制算法,从而使系统准确的跟踪目标。
REVS-50M小型光电跟踪系统是由深圳元创兴科技有限公司提供的一个开放的实验平台,采用通用运动控制器和计算机作为控制系统,对运动目标进行实时检测与跟踪。光电跟踪系统由手动靶标、图像采集设备、激光测距设备[9]、转台4部分组成,见图1。

图1 光电跟踪系统组成[10]
操作人员手动控制靶标在前后、左右、上下三个方向运动,运动信息通过图像采集设备传送到计算机中并进行处理,处理后得到的控制信号输入到转台,通过一定的控制算法实现转台对靶标的实时跟踪[10]。光电跟踪控制系统的硬件组成如图2所示。控制系统控制转台跟踪圆形的黑色手动靶标。整个光电跟踪系统的工作流程如图3所示。
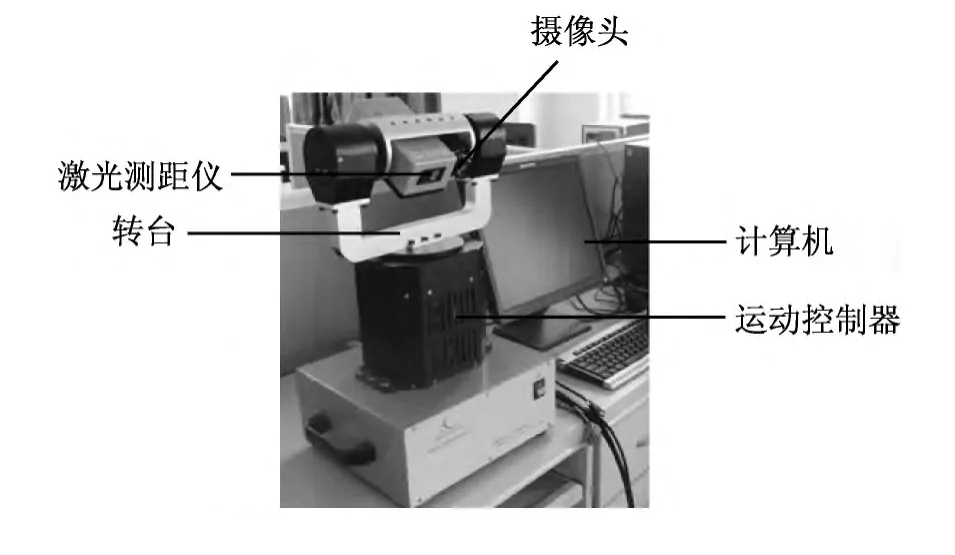
图2 光电跟踪系统控制部分
2 控制系统设计要求及建模
光电跟踪系统要求具有较短的响应时间和较高的跟踪精度,因此要对其中的控制子系统采用合理的控制算法,使摄像头能够实时并且精确地对运动目标进行跟踪。
图3中“求出控制量”这一步是本实验主要内容,通过采用合适的控制方法,使系统能够达到较高的跟踪精度,具有较好的实时性。
光电跟踪系统属于双闭环输入输出位置随动系统,内环为速度环,外环为位置环[11-12]。针对的控制对象是光电跟踪系统的转台,其传递函数[13]为

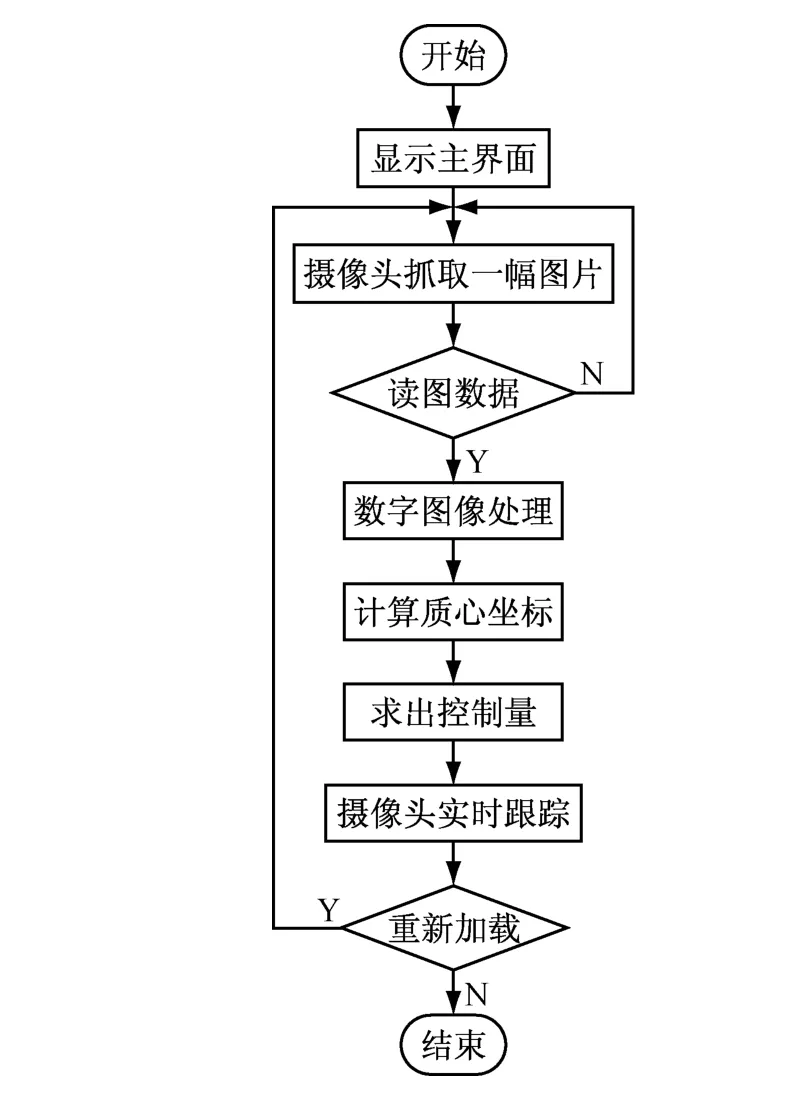
图3 光电跟踪系统的工作流程
本系统预设计的控制器为跟踪回路控制器,设计后的光电跟踪系统的结构如图4所示。

图4 部分简化的光电跟踪系统结构图
3 控制器的设计及仿真实验
3.1 PID控制器的设计
PID控制器是一种线性控制器[14],它根据给定值r(t)与实际输出值y(t)构成控制偏差e(t),将偏差按比例、积分和微分通过线性组合构成控制量u(t),对被控对象进行控制。控制器的输出和输入之间的关系可描述为:

式中:Kp为比例系数;Ti为积分时间常数;Td为微分时间常数。PID控制中Kp、Ti、Td的值直接决定了一个控制系统的好坏。因此,控制最主要的问题是参数的调节问题。一般来说,比例主要用于偏差的“粗调”,保证系统的“稳”;积分和微分则主要用于偏差的“细调”,分别保证系统的“准”和“快”。
REVS-50M小型光电跟踪系统本身采用的是PD控制器进行控制,通过控制器可以得到转台两轴跟踪物体所需要的目标速度。其中PD控制器的参数为Kp=2.8、Td=1.5。我们采用 Matlab 的 Simulink 对系统进行建模仿真。Simulink是用来建模、分析和仿真各种动态系统的交互环境,通过Simulink提供的丰富模块可以迅速地建立动态系统模型,如图5所示,仿真的结果如图6所示。

图5 采用PID控制器的光电跟踪系统模型

图6 采用PD控制器的系统仿真结果
由图6可知,当采用PD控制器对被控对象进行控制时,虽然没有超调,但是达到稳定的时间很长,调节时间接近6 s,不太符合系统需要对运动目标进行实时、稳定地跟踪的要求。基于这个问题,可以让学生对PD控制器的参数进行调整,寻找更合理的参数,同时还可以让学生继续设计更合理的PID控制器,以缩短调节时间。
3.2 工程整定的PID控制实验
针对PD控制的不足,首先对PID控制器进行整定,找到合适的PID参数,以获得稍好的控制效果。
Ziegler等提出的临界比例度法[15]是一种非常著名的工程整定方法。该方法适用于已知对象传递函数的场合,整定PID参数的步骤如下:
(1)将控制器的积分时间常数置于最大,即Ti=∞,微分时间常数置零,即Td=0,同时,将Kp置适当值,平衡操作一段时间,把系统投入自动运行。
(2)将比例增益Kp逐渐减小,直至得到等幅振荡过程,记下此时的临界增益Ku和临界振荡周期Tu值。
(3)根据Ku和Tu值,按照表1中的经验公式,计算出控制器各个参数,即Kp、Ti和Td的值。
表1 临界比例参数整定公式
本实验可以按照Z-N整定法进行PID整定,当Ku=11.125时,出现稳定的等幅振荡,振荡周期 Tu=0.7。因此,最终整定的参数为:Kp=6.75,Ki=0.35,Kd=0.087 5。之后,按照整定的PID参数对系统进行仿真实验,得到的实验结果如图7所示。
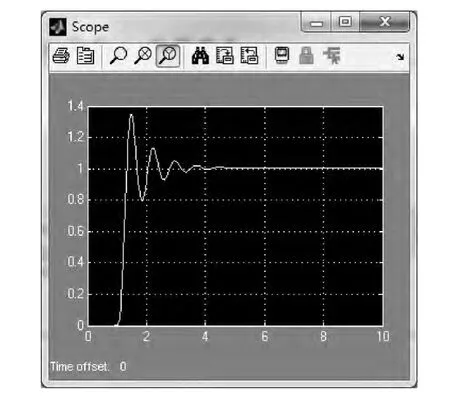
图7 采用整定PID控制器的系统仿真结果
由图7可知,系统的超调为35%,调节时间为4 s。与原系统所用的PD控制器相比,调节时间缩短,但是出现了超调,改善效果比较有限。
通过在此系统中为学生介绍工程整定的PID控制实验,可以让学生扩展思路,继续对PID控制器进行设计、调整,以期达到更好的控制效果。当通过仿真的方法得到较好的PID控制器参数时,可以直接对REVS-50M小型光电跟踪系统的控制器进行调整,直观地观察转台对手动靶标的跟踪效果。
4 结语
本文针对REVS-50M小型光电跟踪系统的控制器进行了分析,设计了PID控制实验,对系统设计的PD控制器进行了分析,并针对其存在的问题用经典的PID控制方法进行工程整定。该实验将PID控制的理论知识用于实际的控制系统中,增加了学生的学习兴趣,达到了切实掌握PID控制方法的效果。
实验结果表明,目前所用的方法仍然存在有超调、响应速度慢的问题。因此,在后续的教学过程中还可以进行继续研究,开发基于PID控制的新的实验内容,另外也可以以这两个实验抛砖引玉,扩展学生的思路,在实验教学过程中让学生设计出效果更好的PID控制器,提高学生的动手能力和创新能力。
[1] 马向国.基于MATLAB的自动控制原理虚拟实验仿真平台[J].中国现代教育装备,2010(1):45-47.
[2] 马 壮,周浩淼.浅谈自动控制系统校正实验的Simulink仿真研究[J].唐山学院学报,2010,23(6):41-43.
[3] 孙 洁.“自动控制原理”实验教学改革的实践[J].电气电子教学学报,2009,31(6):69-70.
[4] 白政民,王 武,葛 瑜.自动化专业综合性实验模式探讨[J].实验技术与管理,2010,27(8):164-166.
[5] 王晓红,朱晓明.现代工程训练教学模式的研究与实践[J].实验技术与管理,2009,26(6):118-123.
[6] 孙腊珍,张增明,叶邦角,等.科研能力培养和研究生实验教学体系的构建[J].学位与研究生教育,2010(6):58-60.
[7] 李位星,高 岩.自动化专业研究生课题研究型实验课程建设[J].实验技术与管理,2010,27(7):145-147.
[8] 张 荆.机载光电跟踪系统[Z].六一三所,1992.
[9] 光电跟踪成像系统使用说明书[Z].深圳市元创兴科技有限公司,2011.
[10] 张 佳,陈 杰,窦丽华.基于光电跟踪系统的系列实验开发[J].实验室科学,2012,15(6):40-43.
[11] 廖高华.高性能步进电机控制系统的研制[D].西安:西安电子科技大学,2004.
[12] 王玉琳,王 强.步进电机的速度调节方法[J].电机与控制应用,2006,33(1):53-56.
[13] 徐晓霞.机载光电跟踪系统的模糊PID控制[J].电子设计工程,2012,20(2):108-111.
[14] 王树青.先进控制技术及应用[M].北京:化学工业出版社,2001.
[15] Ziegler JG,Nichols N B.Optimum settings for automatic controllers[J].Trans ASME,1942,64:759-768.
猜你喜欢
军民两用技术与产品(2021年10期)2021-03-16
世界农药(2019年3期)2019-09-10
重型机械(2019年3期)2019-08-27
光学精密工程(2016年4期)2016-11-07
肿瘤影像学(2015年3期)2015-12-09
物探化探计算技术(2014年1期)2014-06-27
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28
自动化博览(2014年4期)2014-02-28
电子设计工程(2014年17期)2014-02-27