
三点悬挂装置下甘蔗种植机动力学性能分析
2013-08-31 02:31蒲明辉卢煜海李兆龙
装备制造技术 2013年2期
李 竞,蒲明辉,卢煜海,李兆龙
(广西制造系统与先进制造技术重点实验室(广西大学机械工程学院),广西 南宁 530004)
过去的拖拉机多数是牵引自身有行走机构的农机器具进行田间的农业耕作,现在的拖拉机大多采用悬挂系统装置,可以直接操作农具的升降,调节农具所需要的高度和深度,操作起来也更加人性化。目前的拖拉机悬挂装置有两点悬挂和三点悬挂两种。本中研究的甘蔗种植机由拖拉机牵引,采用液压输出系统,使用三点悬挂装置。
1 在ADAMS中建立动力学模型
虚拟样机技术是一项新生的工程技术。借助于这项技术,工程师们可以在计算机上建立机械系统的模型,模拟在现实环境下系统的运动和动力特性,并根据仿真结果精化和优化系统的设计与过程。虚拟技术的快速发展给我们分析问题提供了方便,但其建模技术不够完备,因此本文首先在三维软件UG中建立甘蔗种植机的机架和三点悬挂装置装配的实体模型。
1.1 甘蔗种植机
甘蔗联合种植机主要由拖拉机和种植机主体两部分组成,两者通过拖拉机的三点悬挂装置进行连接。该型号的甘蔗种植机主要是针对大、中型拖拉机三点悬挂装置来设计开发的,该机将开沟部件、排种部件、施肥和淋水部件、覆膜部件、培土和镇压部件以及蔗种托架平台集成在种植机机架上,形成了甘蔗种植机主体总成,并采用对称设计,机身两边通过平衡轮保持稳定。甘蔗种植主机通过由小到大的模块化思想进行研究设计,将施肥部件和淋水部件独立出来与主体机架相固定,并且与其他部件相互协调来发挥作用。大部分的部件都能够实现量的调节,主要的可调部件如下:
(1)开沟部件:能够实现开沟宽度、播种深度和开沟行距的调节;
(2)播种部件:能够实现甘蔗量的调节;
(3)施肥部件:能够实现肥料量的调节;
(4)淋水部件:能够实现水量的调节;
(5)覆膜部件:能够实现塑料薄膜的宽度调节;
(6)培土部件:能够实行对甘蔗需要的土壤量进行调节。
为了提高液压系统的效率,在设计时对种植机的整体布局采用重心前移的方式,使重量较大的部件(如淋水部件、施肥部件和甘蔗切割机构)紧靠拖拉机后面,既能提高种植机的平稳性,降低提升力,又可增加肥料和水的容量。同时为了缩减甘蔗种植机的空间范围,在甘蔗种植机和甘蔗蔗种托架的衔接部分采用一体式的布局方式。最后在UG中建立甘蔗种植机的整机模型。
1.2 三点悬挂和甘蔗种植机模型的建立
拖拉机三点悬挂系统的工作过程:甘蔗种植机在被提升过程中,通过悬挂装置的两个下拉杆来施加提升力,通过上拉杆来辅助机架的平衡并拉起机架。在种植机被抬起的工况下,对与种植机相配合的悬挂装置的终点位置进行测量,测得悬挂机构下拉杆的竖直上升高度为192mm,对悬挂系统进行简化处理如图1所示。最后把甘蔗种植机和三点悬挂机构进行了装配,如图2所示。并将装配文件生成为X_T文件导入到ADAMS(Automatic Dynamic Analysis ofMechanical System)中。
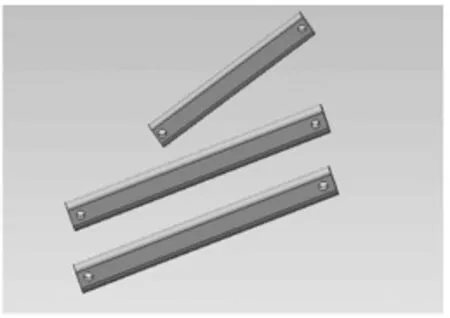
图1 三点悬挂图
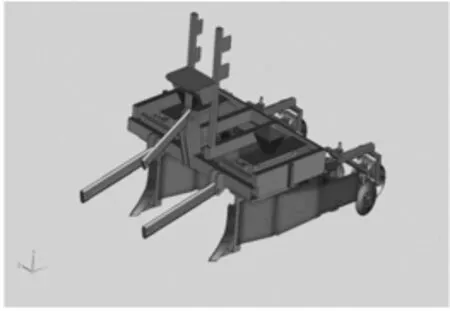
图2 装配图
为了能够在ADAMS里分析,需要在模型里添加相应的材料密度、约束和力。
(1)施加载荷
种植机承受的力:因在刚体动力学分析的时候,力的施加只能够把物体当做刚体来考虑,只能添加集中力。
水桶底座承受来自水的重力约为520 N,添加在水桶底座的中质心上;
座位下方支撑管受到人体的重力约为1 200 N,分别添加到质心上。
机架与放置甘蔗的后挂采用铰链连接,甘蔗平台与机架的链接图如图3所示。
链接挂耳主要承受甘蔗的重力,此时的后挂模型可以简化为杆与杆之间的相互作用力,受力分析如图4所示,按照如下参数进行计算:甘蔗重量1 000N,经过测量甘蔗平台长度AB=875mm,甘蔗平台的支撑管和甘蔗平台之间的夹角为15°,甘蔗平台的重量较甘蔗来言,可以忽略不计,甘蔗平台支撑管的重量也可忽略不计。根据三力汇交定律进行计算[5]:AE=BE=1 000/sin15°=3863.7N,挂耳受力为3 863.7N,分解后水平方向受力为3 732N,竖直方向受力为1 000N。

图3 甘蔗平台和机架的链接图
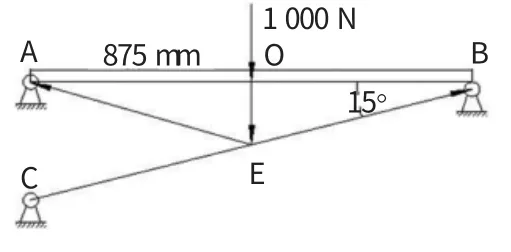
图4 甘蔗平台受力分析图
(2)添加约束
在三点悬挂机构的施力端,我们对上、下拉杆的三处添加Joint,由于下拉杆两处是提供动力的源头,通过添加Motion=-30d×time,来实现种植机的动力学分析。根据悬挂系原理所知,农机器具之间的链接为球铰链接,故在悬挂系和种植机三处链接部位施加球铰副,在培土机构和开沟机构、覆膜机构和培土机构之间存在转动副,但是由于悬挂机构抬起种植机的时候提升速度很慢,故可把此处的转动副忽略,代替为固定副,其余各部件之间也通过固定副来代替。
经过对实际模型的测量,种植机被提升提起时,悬挂机构下拉杆的竖直上升高度为192mm,为了能够使种植机在对应的高度停止被提升,在此需要设置传感器[6]。当用户定义的仿真事件需要在运行过程中需要修改时,此时需要传感器。此事件被定义为一个逻辑表达式,表达式比较目标值,如果逻辑表达式的值为真值时,模拟过程会发生动作,如果逻辑表达式的值为非真值时,模拟过程会继续按照原来的表达进行。
现定义该模型的传感器:对应该模型,在下拉杆上的MARKER_82和ground上的MARKER_147建立X轴上的DX(MARKER_82,MARKER_147)函数,即测量下拉杆和ground的X轴的位移。
2 三点悬挂装置下种植机动力学性能分析
在完成模型建立之后进行悬挂系和种植机之间的动力学分析,设置参数End Time=2 s,Steps=200,仿真之后的曲线如下:
(1)左下拉杆和右下拉杆的MOTION力曲线如图5、图6所示。
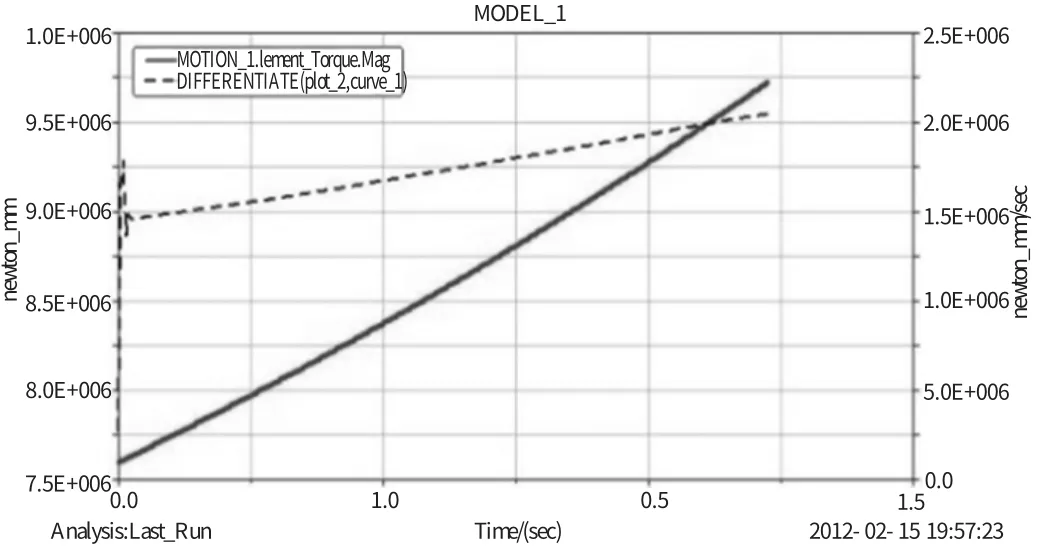
图5 左下拉杆MOTION力曲线
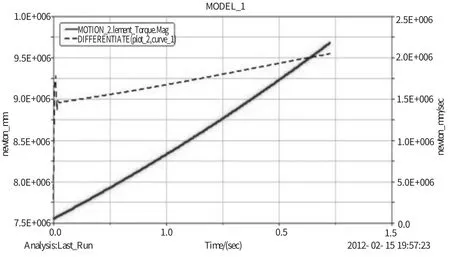
图6 右下拉杆MOTION力曲线
Motion上的力为拖拉机液压系统作用在三点悬挂机构的力。上述两图中的虚曲线为Motion力的求导函数曲线,在正常运行情况下为线性运行,说明提升种植机运行过程平稳。
(2)左下拉杆和右下拉杆作用在种植机上的力曲线如图7、图8所示。
(3)上拉杆链接种植机的力曲线,如图9所示。
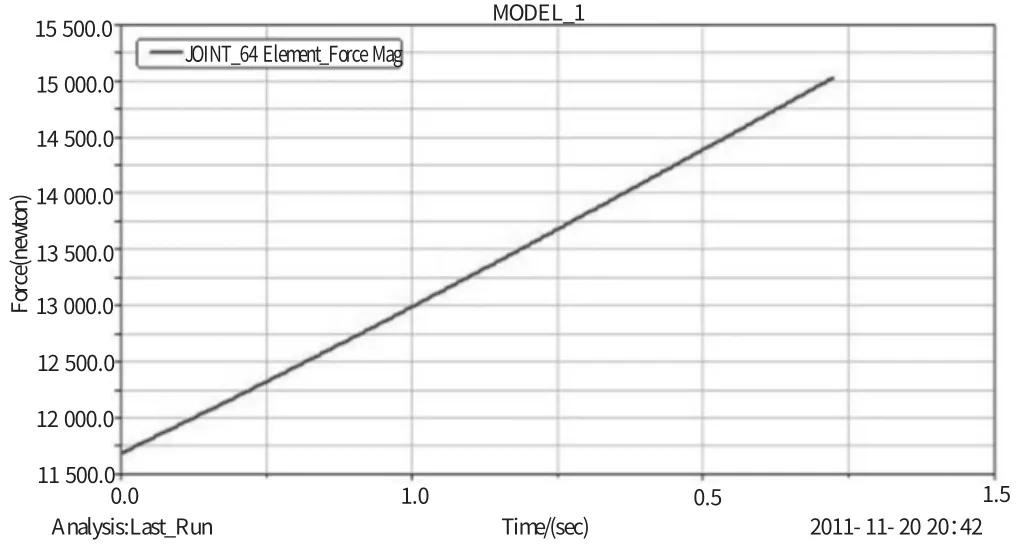
图7 左下拉杆作用在种植机上的力曲线
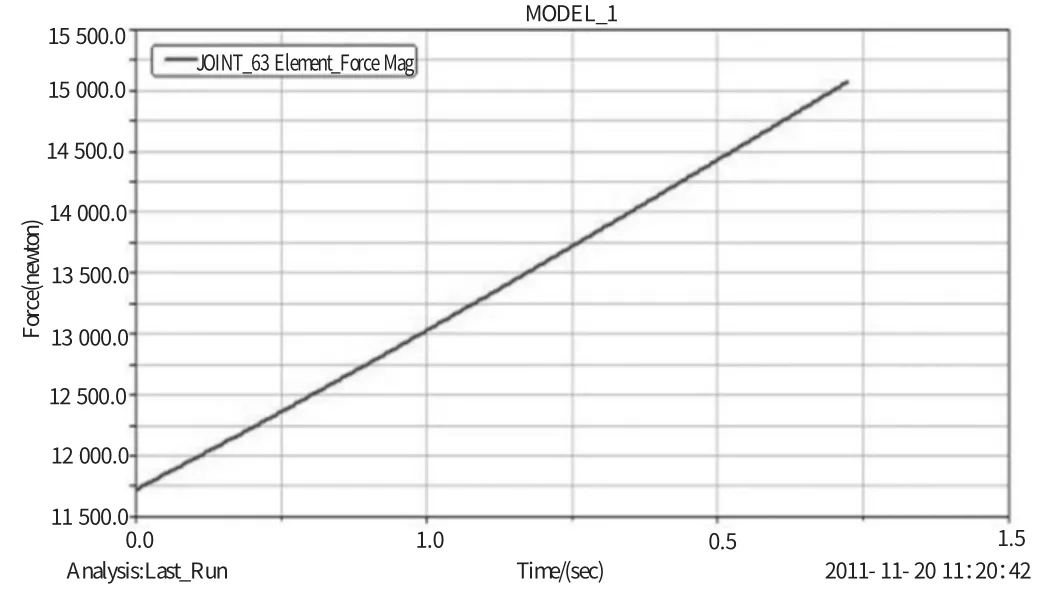
图8 右下拉杆作用在种植机上的力曲线
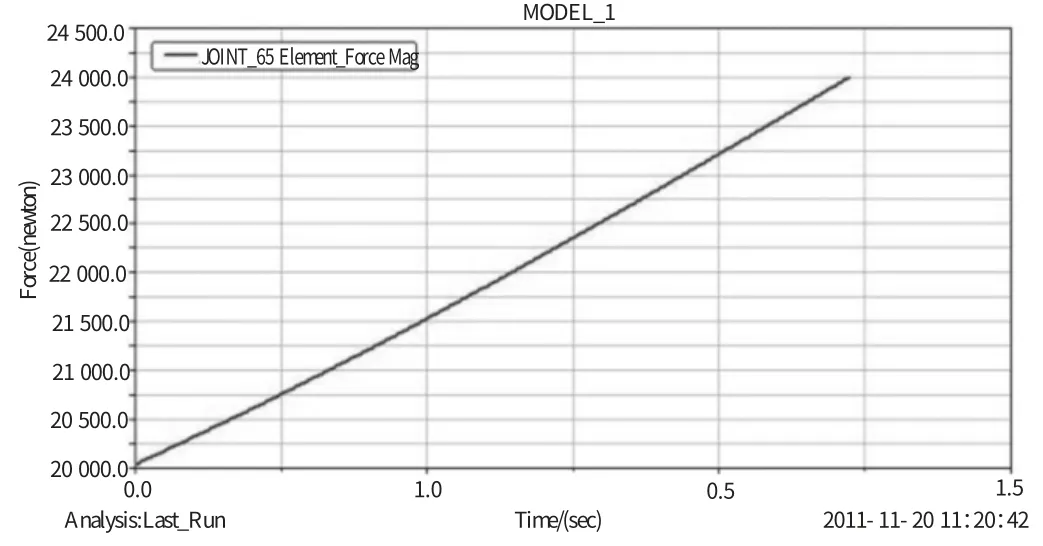
图9 上拉杆作用在种植机上的力曲线
上述三个力曲线的最大值分别为:左下拉杆链接种植机的力为15 081 N,右下拉杆链接种植机的力为15 036N,上拉杆链接种植机的力为24 000N。此处得到的力可以为后续的设计提供依据和参考。
3 结束语
本文运用ADAMS软件,对甘蔗种植机和三点悬挂装置模型进行了动力学分析,得出了三点悬挂装置对甘蔗种植机的作用曲线和液压系统施加在三点悬挂装置的作用曲线,验证了种植机在液压系统的驱动下,运行平稳;通过分析得到悬挂机构作用在种植机的力,为后续的分析及优化设计提供了数据支持。
[1]镇江农机学院.农机手册[M].上海:上海科学技术出版社,1978.
[2]郑建荣.虚拟样机技术入门与提高[M].北京:机械工业出版社.2007.
[3]唐遵峰,胡国胜,李春友,程俊争,陈超平,朱河源.2CZY-2型甘蔗联合种植机的设计与研究[J].农业机械,2007,(10B):73-75.
[4]毕世英,杨晓京,李哲昆.UG与ADAMS/View之间的图形数据交换研究[J].机械,2004,6:66-68.
[5]工程力学(静力学与材料力学)[M].北京:高等教育出版社,2004.
[6]李 军,邢俊文,覃文杰.ADAMS实例教程[M].北京:北京理工出版社,2002.
猜你喜欢
机械设计与制造(2022年10期)2022-10-12
港口装卸(2022年4期)2022-08-31
铁道机车车辆(2022年1期)2022-03-24
潍坊学院学报(2020年6期)2020-11-22
家庭影院技术(2019年12期)2020-01-19
小猕猴学习画刊(2019年8期)2019-09-16
广东第二课堂·小学(2019年1期)2019-03-06
中国计算机报(2018年13期)2018-05-23
中国糖料(2016年1期)2016-12-01
作文大王·低年级(2016年9期)2016-09-21
