
GNSS接收机的设计与仿真*
2013-08-29 05:47李永虎黄仰博孙广富
全球定位系统 2013年4期
李永虎,黄仰博,孙广富
(国防科学技术大学电子科学与工程学院,湖南 长沙410073)
0 引 言
在GNSS接收机中,接收机基带信号处理是一个在射频前端有关处理完成之后,完成解调以及解扩,并最终解调出电文的过程。该过程可以看成是完成接收信号与本地信号的同步。该同步过程通常分为两步:即粗同步和精同步,分别对应着捕获和跟踪[1]。接收机在开始跟踪信号之前,先要估计出接收信号的载波频率和码相位这两个参数,再根据这些参数估计值初始化跟踪环路,即完成引导操作,并最后过渡到跟踪过程。捕获的目的就是为了获取载波频率和码相位的估计值[2],引导是实现捕获到跟踪的转换,跟踪则是实时的调整频率控制字,使能够稳定跟踪并得到电文初始数据,最后根据编码方式将初始数据送到有关译码模块进而解调出电文。
接收机的捕获按实现方式分为时域和频域两种。基于时域处理的实现结构功能简单,比较易于理解,但运算量较大。基于频域的实现结构[3-4]由于FFT的有效性可以并行处理,从而降低运算量,然而该算法需要利用额外的空间预先存储残余FFT的数据,这里,对于捕获模块采用时域匹配滤波器的方式来实现。
捕获完成后,根据得到的参数估计值,初始化码跟踪环和载波跟踪环,以完成引导。当跟踪环进入稳定工作后,依据延迟锁定环(DLL)和锁相环(PLL)可以实时的调整相位误差,从而稳定跟踪。
1 接收机有关原理
1.1 信号模型和伪码的相关特性
经过射频模块处理后,接收机接收的数字中频信号的数学模型可以表达为:
式中:A为接收信号的幅度;D为电文数据;C为伪码;wi为接收信号的中频频率;φi为接收信号的初相;ni为方差为δ2的加性高斯白噪声。
在接收机中,信号的相关特性对于捕获跟踪非常重要。在捕获中,利用信号的相关特性可寻找到相关峰,在跟踪中也是根据信号的相关性来确定即时支路码流与接收信号的相位差,从而实时调整,使准时支路与接收信号对齐,进而利用相关值获取电文数据,得到信号时间和卫星位置等信息。图1(a)示出了GPS卫星号为1时C/A码的自相关结果,图1(b)示出了GPS卫星号为1的伪码和卫星号为2的信号互相关的结果,信号良好的相关特性对接收机有重要影响。
1.2 数据解调
在经过AD处理之后的数字中频信号需要下变频到基带,再进行相关累加操作,数据解调的核心是数字下变频,通过本地NCO[5]产生正余弦信号,再和接收信号混频,经过滤波之后得到基带信号。数字下变频的数学表达式为

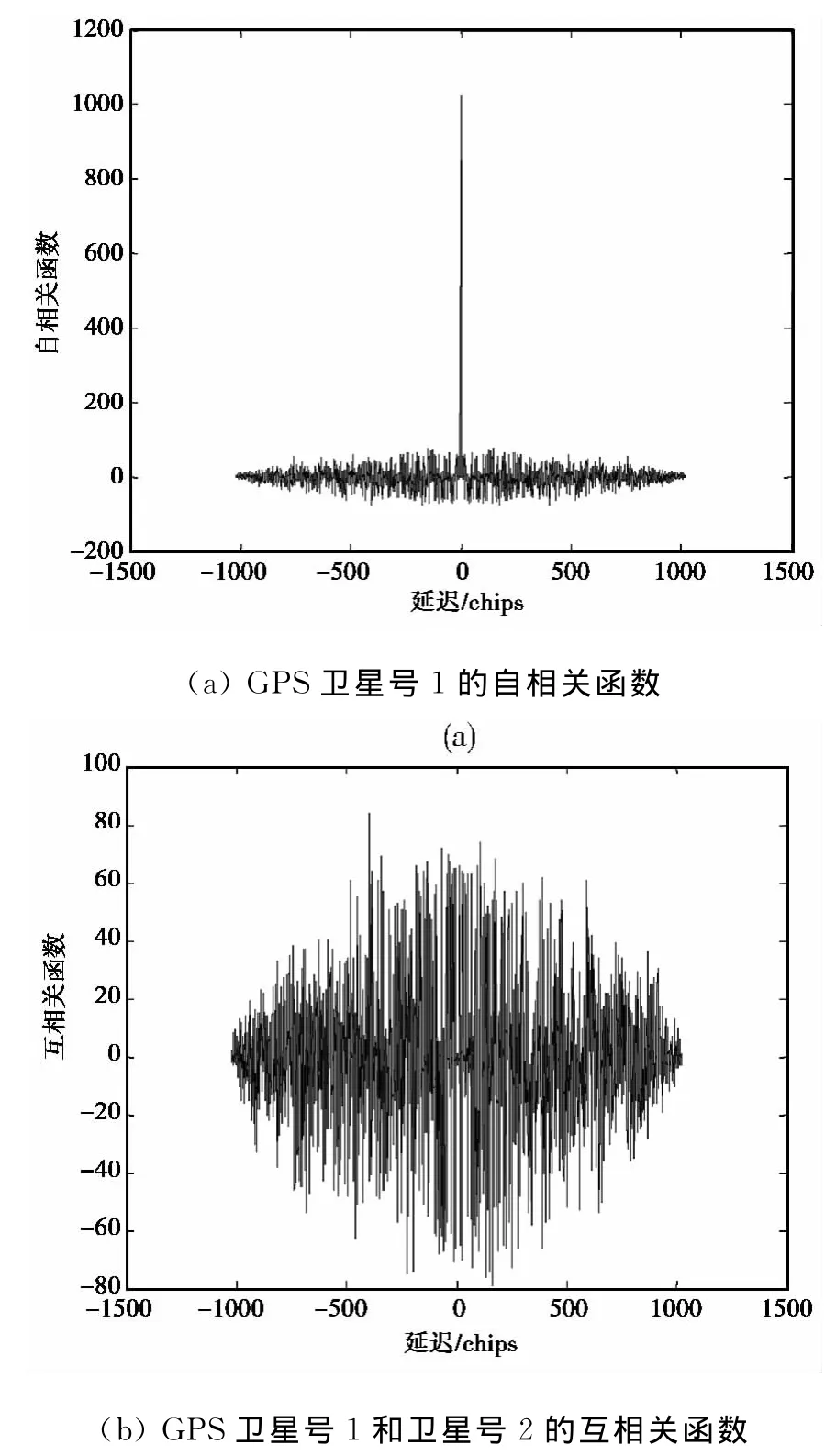
图1 伪码的相关性
式中:wl为产生的本地信号的数字频率;φl为本地信号的相位,将上述混频结果经过滤波器可以得到I/Q支路基带信号。得到的滤波结果送到后续模块可以进行相干积分和非相干积分。其中本地载波信号是通过数控振荡器(NCO)产生,NCO的实现结构如图2所示。
在利用载波NCO产生一定频率的载波信号的计算公式为


图2 数控振荡器框图
式中:f为所需要产生的信号的频率;φword为频率控制字;fclk是采样频率。而N是移位寄存器的长度,通过设定NCO的φword大小产生希望频率的正弦波,反之φword大小是根据已知正弦波的频率计算得到的[6]。
1.3 数据解扩
在经过AD处理之后的数字中频信号需要下变频到基带,进行相关累加操作,数据解调的核心是进行相关累加操作。
在进行数据解扩时,利用伪码的相关特性,进行相干积分。匹配滤波器由于能够有效的实现相关,所以常被用来检测和同步信号[7],该过程可以通过式(5)得到。
由于相关累加是一个运算量较大的模块,在实际实现过程中可以采取抽取数据的方式,即在一个码片内,只抽取接收信号的几个数据,和本地信号做相关累加,抽取数据和接收信号的相关累加表达式如式(5)所示。
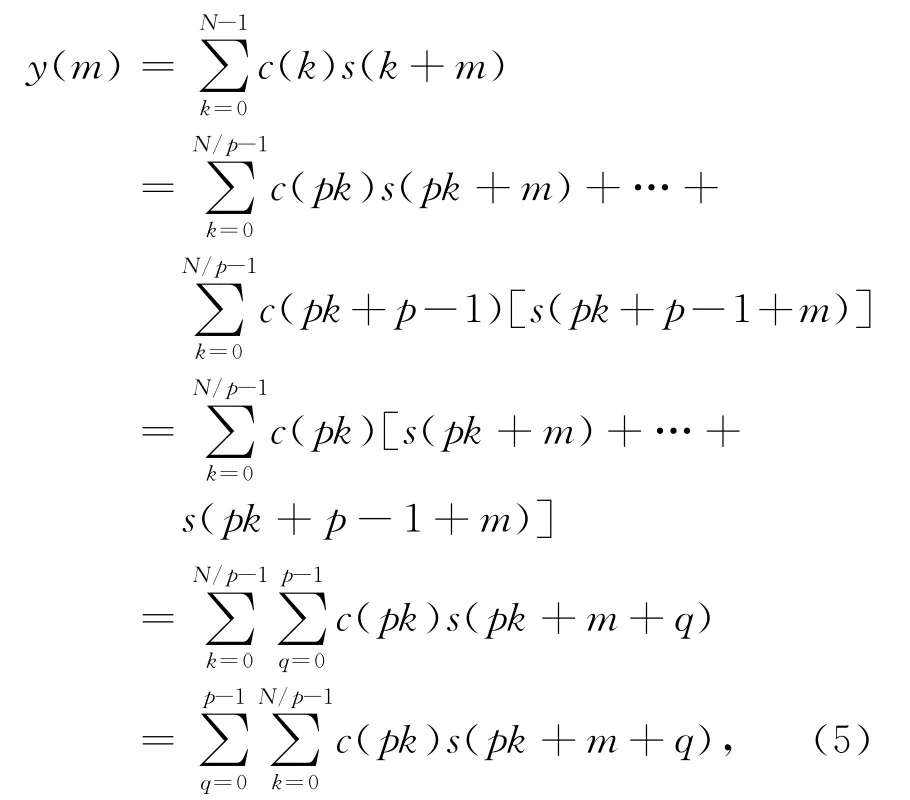
式中:N为参加相干积分时间的数目;m表示本地伪码和接收数据伪码的码相位相差m个单位;c(.)表示参与相干积分伪码数据;s(.)表示参与相干积分的数据;y(.)表示接收数据和本地码的相关结果。实际通常采取半个码片为1个单位;上式表示两者相差m/2个码片。
2 接收机的主要构成
2.1 捕获模块
在接收机的实现中,捕获模块是接收机重要的一部分,它实现对接收信号参数的初步估计,捕获模块的实现结构如图3所示。
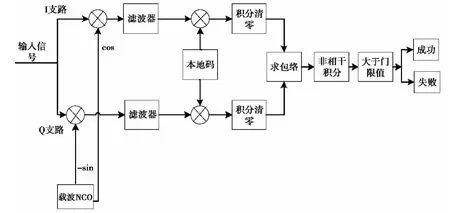
图3 捕获概略图
在捕获模块中,数字下变频和相干积分完成之后,通常采用非相干积分,非相干积分是在原有相干积分的基础上进行累加,以获得必须的积分增益:

式中:时钟V是检测量;I和Q是相干积分的结果,非相干积分的数目可根据需要来进行调整。在获得非相干积分值后,可以将非相干积分的结果同预先设置好的捕获门限进行比较,当非相干积分值大于捕获门限值时,则认为捕获正确,反之,则搜索下一单元。
2.2 跟踪模块
在捕获模块成功实现捕获之后,将捕获所得到参数估计值赋给跟踪环,然后载波跟踪环和码跟踪环根据初始化参数值进行工作,并实时地根据鉴相结果进行调整,从而稳定的实现跟踪,并解调出电文数据。在捕获模块完成之后,需要在本地进行引导,直到稳定跟踪。跟踪过程中,需要实时的进行码相位和载波相位(也可以对频率进行鉴定)的鉴定,从而根据鉴相误差来调整有关控制字,使得跟踪环能够稳定的进行跟踪。
在本文的实现过程中,对于码相位的鉴定,采取非相干超前减滞后赋值法,其利用早迟支路的非相干积分值进行鉴相,为了能够适应信噪比的快速变化,此处采用归一化的鉴相函数,其数学表达式为式(7)。
对于载波相位的鉴定,为了避免符号位的影响,采用costas环,其实现方式

式中:δcp为由早迟环得到的鉴相误差;而θe为由载波鉴相环得到的载波相位误差,在由上述鉴相器得到相位偏差后,可以将其转化为频率控制字,加到原有的频率控制字上,以实时更新环路控制字。
3 仿真分析
在本次接收机的实现过程中,采用GPS的C/A码,假设经过AD采样后的数字信号中频频率为12.24M,采样频率为100M,整个实现过程在FPGA平台进行验证;AD输入信号的频谱经过采集如图4(a)所示,将AD采样后的信号经过混频和滤波之后频谱如图4(b)所示,由所得结果可知数据下变频正确地实现了数据解调功能。
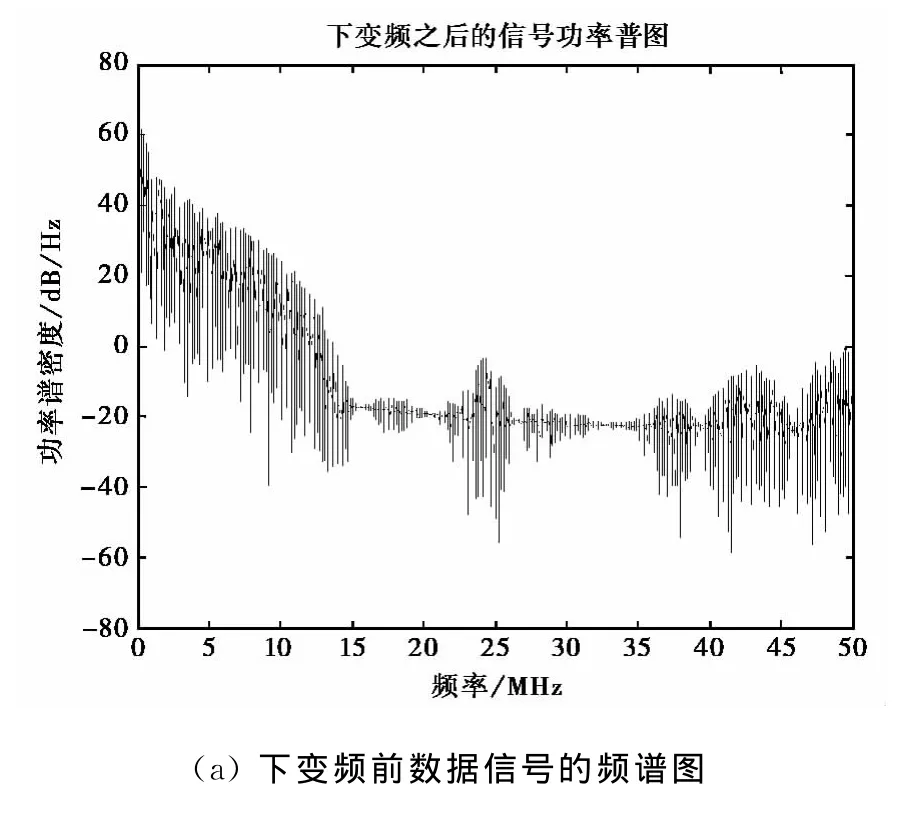

图4 下变频前后信号功率谱比较
在进行数字下变频之后,将滤波之后的数据输送到捕获模块,经过相干积分和非相干积分之后得到信号的相关,从图5中可以得到,若本地信号与接收实现了对齐,则在经过相干积分和非相干积分之后得到的包络值明显大于没有对齐的时候,硬件实现的捕获包络值采集如下,图中搜索的间隔为1/4码片:

图5 捕获模块的结果
当捕获成功之后,用捕获模块得到参数估计值来初始化跟踪环路,在稳定跟踪之前需要经历一个暂态过程,可以通过观察载波频率控制字和码频率控制的变化情况来说明引导过程,图6示出了控制字的变化情况,从图中可以看出,在经过短暂的调整之后,跟踪模块能够实时的调整频率控制字,实现载波去除,并根据频率控制字的变化情况判断出多普勒频率。

图6 引导阶段频率控制字的变化
当捕获完成之后到跟踪的起始阶段,频率控制字变化较为剧烈,当进入到稳定状态之后,频率控制波动范围较小,能够正确的进行跟踪。
当引导阶段完成之后,信号进入稳定的跟踪状态,根据早准迟支路的相关值,来完成鉴相操作,取正常工作的某个时刻的非相干积分值,可以得到图7所示结果。

图7 延迟锁相环早准迟支路的相关值
在稳定跟踪时,由于噪声的影响,早支路和迟支路的相关累加值不等,但准时支路的相关值一定是大于早、迟支路,实际中正是由于早迟支路的不相等造成频率控制字的实时更新,使得跟踪环工作在动态平衡中。
4 结 论
介绍了GNSS接收机在实现过程中有关解调解扩的原理,并给出了仿真和实现过程中的各个阶段的结果,对把握整个接收机的架构有一定的指导意义,在该设计中的各种仿真主要是针对传统的BPSK和QPSK信号,有关新体制信号如BOC、TMBOC等信号的接收有待在原有基础上进行改进。
[1]KAPLAN E D,HEGARTY C J.Understanding GPS:principles and applications[M].Boston :Artech House,1996.
[2]谢 钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009
[3]YANG Chun.Fast code acquisition.with FFT and its sampling schemes[C]//Proceedings of the 9th International Technical Meeting of the Satellite Divi-sion of The Institute of Navigation (ION GPS 1996),1996:1729-1734.
[4]VAN NEE D J R,COENEN A J R M.New fast GPS code-acquisition technique using FFT[J].Electronic Letters,1991,27(2):158-160.
[5]宋效君,王力男.NCO的数字化实现及应用[J].无线电通信技术,2004,30(2):51-52.
[6]朱玉颖,杨小华,姚远程.QPSK数字解调与FPGA的实现[J].通信技术,2010,43(07):61-63.
[7]AKOPIAN D,AGAUAN S.A fast and parallel matched filters in time domain.[C]//Proceedings of the 17th International Technical Meeting of the Satellite Division of the Institute of Navigation(ION GNSS 2004),2004:491-500.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
西安石油大学学报(自然科学版)(2022年5期)2022-10-08
通信电源技术(2021年8期)2021-08-26
河北大学学报(自然科学版)(2020年2期)2020-05-22
雷达学报(2018年5期)2018-12-05
电机与控制学报(2018年9期)2018-05-14
电机与控制学报(2018年9期)2018-05-14
探测与控制学报(2018年2期)2018-05-09
移动通信(2017年11期)2017-06-20
科技与创新(2017年7期)2017-05-13
