
基于动态短基线的精密单点定位精度检验*
2013-08-29 05:47姚飞娟
全球定位系统 2013年4期
姚飞娟,杜 娟,刘 星
(中国洛阳电子试验装备中心,河南 洛阳471000)
0 引 言
GPS精密单点定位(PPP)是在不作载波相位差分的情况下,利用全球若干IGS跟踪站获得的GPS观测数据计算出精密卫星轨道参数、精密星历和卫星钟差,以及单台双频GPS接收机采集的载波相位观测值,经后软件处理就可实现数千万平方公里乃至全球范围内的厘米级到分米级的动态单点定位,无需地面基准站的支持,不受作用距离的限制,大大降低了作业成本而备受各行各业用户青睐。因而,在动态高精度测量与导航定位以及低轨道卫星定轨等方面有广泛的应用前景[1]。但其在高动态条件下的定位精度如何影响着PPP技术更广领域的应用。利用GPS精度鉴定测姿系统[2-3]构建的动态超短基线获得的测量数据,采用PPP模式对动态站进行定位数据处理,通过动态GPS天线相位中心的空间相对距离与静态实测距离比较,实现高动态GPS精密单点定位精度检验。以某次校飞试验数据为例,分析得出高动态下PPP处理的实际测量精度,验证了采用超短基线检验方法行之有效,具有一定的现实意义和工程参考价值,为GPS精密单点定位技术应用于高动态领域提供了参考。
1 原理简介
1.1 GPS高动态短基线构造
在GPS精度鉴定校飞试验中,GPS设备受机载加装限制,而校飞试验航路设计具有直航线、匀航速运动特点,为了测量飞机姿态,应用GPS动态相对定位理论,简化了测姿模型,利用主、副两台GPS接收机,天线加装在飞机中轴线上(如图1中的 GPS(1)和 GPS(2)所示),构建了用于精度鉴定的机载GPS测姿系统[3],实现了GPS高动态短基线构造。
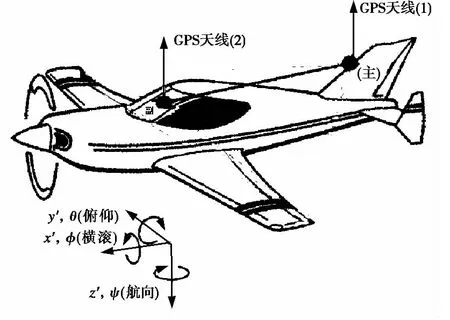
图1 高动态测姿短基线示意图
1.2 高动态精密单点定位精度比较
在精度鉴定校飞试验中,为了快速的得到事后差分计算结果,通常在试验时在已知点位架设基准站,移动目标站为飞机,安装两个双频GPS接收机,经事后载波相位差分处理对移动目标进行定位和测速;利用双动态解算软件可得到机载动态GPS目标之间的相对位置。试验前静态条件下测量机载双天线的基线长,其精度小于等于0.3 mm,以该测量值为真值;为了检验PPP动态实际定位精度,通过国际GNSS服务组织IGS网站(ftp://garner.ucsd.edu)下载精密星历和钟差,其精密星历产品数据又可分为超快速卫星星历(IGU)、快速卫星星历(IGR)和最终产品卫星星历(IGS)。这些产品在精度、时延、更新率和采样率等方面均有不同。大量文献资料[4-5]已证明快速卫星星历和最终产品卫星星历两种产品处理解算结果无明显差别,在任务要求时间紧迫时,可采用IGR产品进行PPP模式解算求得定位结果。为了检验精密单点定位动态实际定位精度,利用IGS网站ftp下载IGR精密星历数据和钟差对机载两个接收机记录数据作PPP处理获取机载双台GPS定位结果,之后利用基准站观测数据与动态站观测数据作载波相位差分处理获得的各自定位结果;最后利用机载双台观测数据作双动态基线解算动态基线长结果;将各自结果根据空间两点之间的距离公式(1)得到动态条件下基线的测量长度d,与真值(静态条件下测试值)作比较,对精密单点定位结果进行检验。

式中,(X主,Y主,Z主)为靠近机尾的主接收机相位中心解算的大地直角坐标系下三维坐标。
为了精确客观的分析比对精密单点定位的误差统计结果,以精度最高的为真值,统计其残差的平均值、方差及总误差,从而更直观的了解离散解算结果测量量与真值的符合度和分布情况。比对残差序列

式中,Pdd,Psd为空间计算基线长和真值基线长。均值:

方差:

总误差:

2 算例数据分析
为了验证该方法的正确性和软件有效性,利用IGS网站服务器提供时延为17h的IGR快速精密星历,以2012年12月某次GPS精度鉴定飞行数据为例进行分析,接收机选用诺瓦泰GPS OEMV双频接收机,采样率为20Hz,飞机航速为230m/s左右,飞行高度为8 000m左右,机载基线长为6.798 7m;各设备试验期间运行正常,整个飞行过程数据录取完整有效,参与比较数据PDOP值在3.2左右。选用 Waypoint软件 GrafNav 8.1PPP处理模块,对GPS接收机码间偏差(DCB)[6]进行修正处理,得到机载主、副接收机PPP处理结果,经公式(1)计算得到实时测量基线长;此外利用Waypoint软件GrafNav 8.1软件将地面静态基准站数据与主副机载站数据作载波相位差分处理,并进行了卡尔曼滤波和电离层修正,将处理结果经公式(1)计算得出动态条件下载波相位差分实时测量基线长;通过GrafMov 8.1的快速模糊度分辨算法(即KAR)完成双动态矢量解算处理,得到高精度动态瞬时差分基线长;将三种处理方式所测得的实时基线长与真值(试验前静态测量所得)作差如图2~4所示。

图2 精密单点定位空间解算基线残差
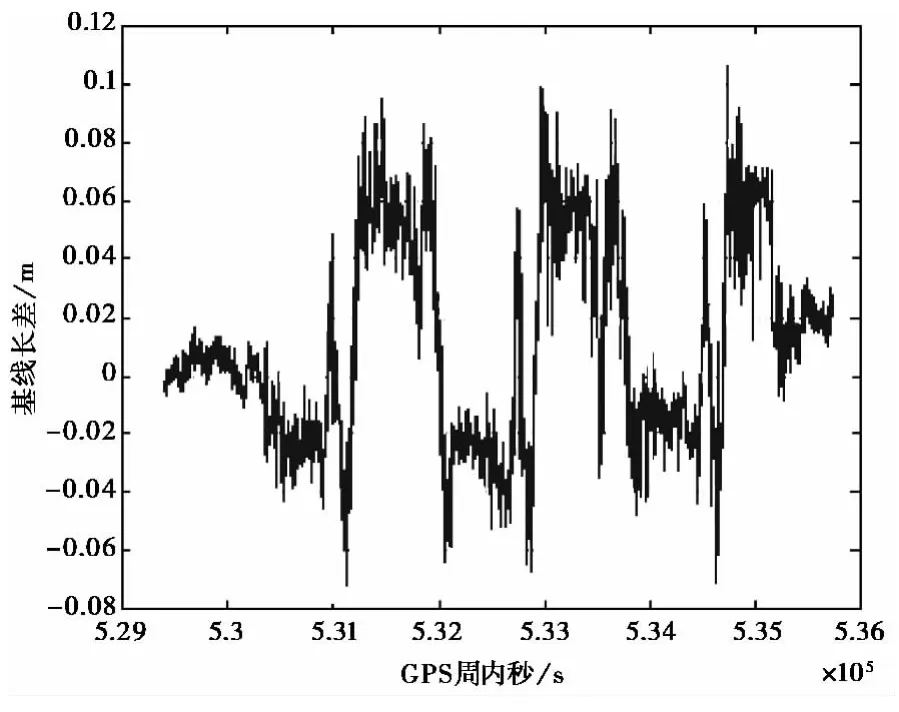
图3 精密单点定位空间解算基线残差
由图4显而易见,双动态解算基线精度最高(±0.02m之间),以该模式处理结果为真值,分析统计PPP的动态实测定位精度,其基线的残差均值、方差和总误差如表1所示。
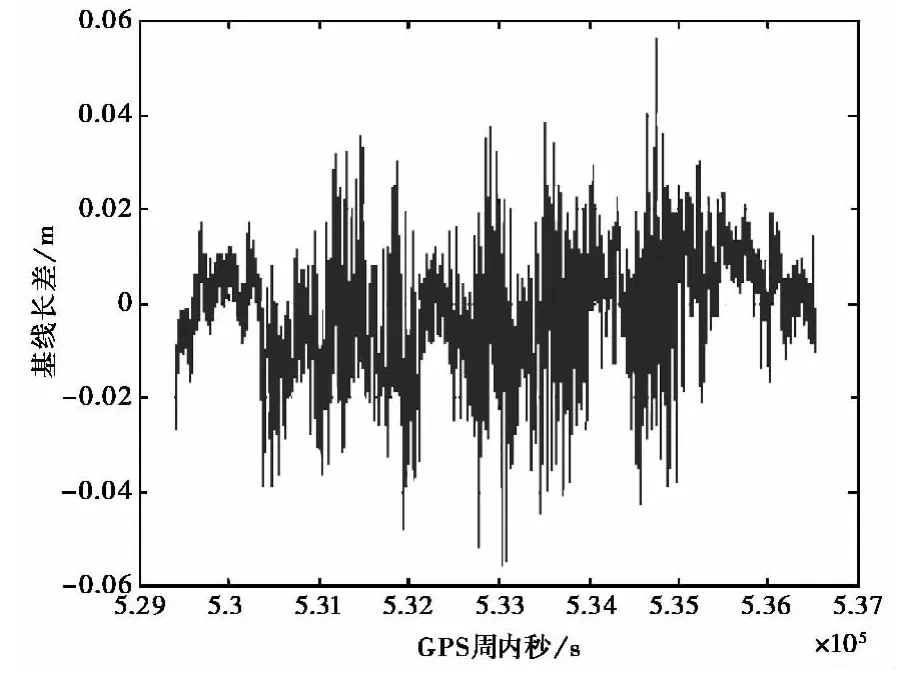
图4 精密单点定位空间解算基线残差

表1 动态基线长误差统计
3 结 论
利用双动态超短基线方法检验高动态PPP定位精度,经试验数据分析验证表明,高动态条件下,通过对GPS接收机码间偏差(DCB)[6]进行修正,PPP可实现分米级的定位精度;该检验方法方便、有效。精密单点定位技术在作业实时性、精度要求不高时可成功应用IGR精密星历和钟差数据处理进行高动态、广域精密定位。随着PPP技术的成熟和研究的深入,可预见其在高精度导航鉴定领域具有广泛的应用前景,将在更广范围进入实质性应用。
[1]刘丙申,刘春魁,杜海涛.靶场外测精度鉴定系统[M].北京:国防工业出版社,2008.
[2]刘丙申,孙付平,张绍军.基于GPS的外测设备精度鉴定测姿方法的研究与应用[J].全球定位系统,2011,35(4):6-9.
[3]杜玉祥.精密单点定位精度分析[J].矿山测量,2010(1):26-27.
[4]罗海英,李 强.基于Waypoint8的GPS精密单点定位研究[J].全球定位系统,2009,34(3):21-25.
[5]黄 健,汪 平,阮仁贵,等.DCB大地测量与地球动力学[J].2010(3):110-117.
[6]李征航,黄劲松.GPS测量与数据处理[M].武汉:武汉大学出版社,2008.
猜你喜欢
汽车实用技术(2022年11期)2022-06-20
锦绣·下旬刊(2019年3期)2019-09-10
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
现代交际(2018年14期)2018-11-01
作文与考试·小学高年级版(2017年16期)2017-08-14
雷达学报(2017年1期)2017-05-17
电子制作(2017年1期)2017-05-17
山东工业技术(2016年15期)2016-12-01
电子制作(2016年1期)2016-11-07
