
基于卫星导航车辆监控系统的超速处罚方法研究*
2013-08-29 05:47张炳琪吴晓东李怀建杜小菁
全球定位系统 2013年4期
张炳琪,方 晖,吴晓东,李 晶,李怀建,杜小菁,刘 建
(1.中国交通通信信息中心,北京100011;2.北京理工大学,北京100081)
0 引 言
随着交通管理部门的安全管理信息化水平不断提高,卫星定位系统、地理信息系统、计算机、无线通信和互联网技术已经得到了广泛的集成应用[1],实现了对营运车辆的综合管理和实时监控,提高了交通安全管理的信息化水平。尤其是卫星导航车辆监控系统的广泛应用,为提高交通安全管理的效率和水平创造了基础。
超速是影响交通安全的最重要因素之一。当前中国交通运输部正在推广基于卫星导航的车辆监控系统,目前已有10%以上的营运车辆与交通运输部的重点运输过程监控联网,入网比例正在快速增加。如何利用卫星导航定位技术对车辆超速进行科学的判断和处罚,是管理部门面临的重要问题。着重研究基于卫星导航车辆监控系统的超速处罚方法。
1 超速处罚现状分析
1.1 超速处罚规定
《中华人民共和国道路交通安全法》第八十六条规定,机动车在道路上行驶,违反限速规定的,按照超过限定时速的百分比进行相应的处罚,限定速度越高的道路,超过限定速度的百分比越高,处罚的力度越大,罚金最高可达2 000元。针对旅游客车、公路运营载客汽车、危险化学品运输车、民用爆炸物物品运输车的超速管理处罚措施,安全法第八十七条规定,超过限定时速50%以下的,处200元罚款;超过限定时速50%的,处500元罚款,每多5 km,加处200元罚款,但最高不得超过2 000元。
安全法除了对超速予以罚金外,同时还制定以下超速罚款扣分标准:
超速处罚超过规定时速10%以内,不罚款,记3分;
超速处罚超过规定时速10%以上未达20%的,处以50元罚款,记3分;
超速处罚超过规定时速20%以上未达50%的,处以200元罚款,记3分;
超速处罚超过规定时速50%以上未达70%的,处以1 000元罚款,记6分,可以并处吊销驾驶证;
超速处罚超过规定时速70%的,处以2 000元罚款,记6分,可以并处吊销驾驶证。
1.2 超速检测方法
现有的测速方式有[2]:线圈测速模式、视频测速模式、激光测速模式、区域测速模式、雷达测速模式、基于车轮转动测速模式和基于卫星导航的测速模式。
每种测速方式优缺点如下:
线圈测速方式的优点是价格低廉,抓拍率高,抓拍图片质量高,可全天候工作;但是缺点是需要切割路面,不宜在高速公路上使用,系统质量受施工质量影响较大,测速误差大,线圈易受环境因素影响,线圈易损坏,尤其在货运车辆较多的路线、气候温度变化较大的区域,系统维护需要封闭道路,维护难度大、成本高。
视频测速的优点是系统简单、硬件设备少,系统成本低廉,工程施工简单快捷,不用破路面;但其缺点是测速误差非常大,受光线影响大,非全天候工作,雨雪雾霾沙尘天气无法正常工作。
激光测速的优点是测速精度高,抓拍距离远,可以移动或固定安装;但是缺点是造价昂贵,操作不便,因激光的特性,所以理论上仅监控道路中的某一点,所以超速违法抓拍率低。
区间测速的优点是可有效的遏制高速路等严重超速现象,系统成本低,执法率高;但其缺点是该测速方式有系统适用要求,对于部分区域或瞬间的超速行为无法监管,系统建设庞大复杂,必须依托高速网络、运营成本高。
雷达测速的优点是价格相对比较优惠,测速较为精确,可全天候工作,不受环境、天气影响,雷达体积下,易于集成;但其缺点是速度相对于高性能的窄波束雷达较慢,一般在150~300ms,宽波束雷达的角度校正不一致,只能取最小角度校正,不带触发信号,抓拍位置不固定,相邻车辆间干扰较大。
基于车轮转动的行驶记录仪,原理是车轮转动时利用车轮半径、转速和线速度的关系,测量得到车辆行驶的速度,设计简单,费用低,缺点是轮胎气压、车辆货载等因素均会导致轮胎直径的变化,严重影响速度测量精度。
基于卫星导航的测速方式是采用GPS技术获取行驶车辆的实时高精度速度信息。通过实验表明,基于卫星导航的行驶记录仪不受气候、车辆载重情况等的影响,可实时测定车辆的速度即为当前车辆的实际行驶速度,且测速精度更精确、更稳定、更可靠。
由上述可知,当前现有的各种测速方式均有着各自的优缺点,但现有的各种测速方式均无法做到对行驶车辆的实时监控。基于卫星导航的测速可以解决测速实时性的问题,这种测速方式将是未来的发展趋势,与现有的测速方式相比,有着不可替代的优越性,有着很大的应用前景。
2 卫星导航测速精度分析
2.1 卫星导航测速方法
GPS测速的方法有基于位置差分、载波相位中心差分和原始多普勒频移观测值三种方法[3-4]。
前两种方法在车辆匀速行驶时,精度较高,不过针对超速车辆速度变化范围大的问题,一般都选择基于原始多普勒频移观测值的测速方法,因为目前大多数GPS接收机具有输出原始多普勒频移观测值的功能,使用廉价的导航接收机就可以进行单点测速,并且具有简单,精度高,实时性较好的特点,能满足当前车辆超速监测对速度测量精度高和速度变化快的要求。
2.2 测速精度误差分析
GPS单点测速的误差源与单点定位的误差源不同,这些误差主要可以分为3大类[5-6],1)与卫星相关的误差,包括卫星轨道误差、卫星速度误差、卫星钟速误差、相对论效应等;2)与传播路径有关,如电离层变化率、对流层变化率等;3)与接收机相关,如接收机观测噪声、接收机钟差变化率误差和多普勒观测值测量精度等。
卫星钟速误差、相对论效应等对速度的影响虽然较大,不过在相对测量方式中,站间单差基本上可以消除它们的影响。对流层延迟随时间的变化率很小,忽略掉不会影响测速精度。多径效应与环境有关,可以认为是随机噪声。
文献[7]、[8]分析表明:采用相对测量法,可以消除卫星轨道误差、卫星速度误差、卫星钟速误差、相对论效应误差、对流层延迟变化率和电离层延迟变化率误差对测速精度的影响,且测速精度只取决于多普勒观测值的测量精度。
2.3 测速精度及可靠性分析
利用文献[7-8]给出的基于 GPS多普勒频移观测值测量速度的数学模型和误差分析模型,选择典型路段和典型行驶情况进行跑车实验,采用普通车辆模拟,选取加拿大NovAtel公司生产的导航型NovAtel ProPak-G2型接收机输出的速度数据作为基准值,对比分析Ublox、泰斗BD/GPS兼容导航板、车辆行驶记录仪等模块输出的速度数据,评估跑车实验测速模块的测速精度。试验数据获得各接收机的测速精度如表1所示,结果表明:利用多普勒观测值可以获得dm/s级的速度。
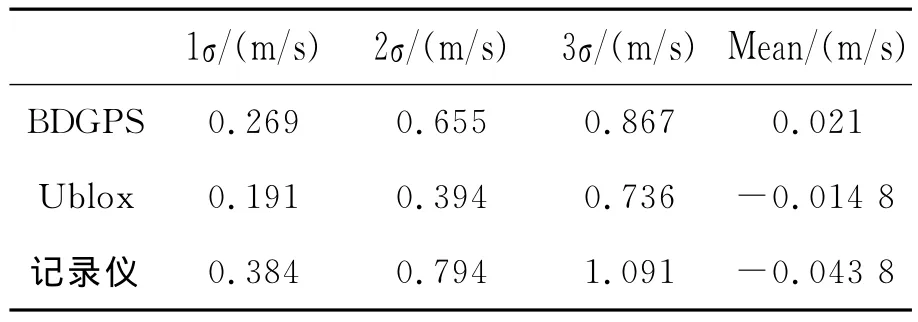
表1 测速精度
另一方面,随着我国北斗二代系统的建设,现已实现了亚太地区的覆盖,而且目前国家正在重点建设北斗地基增强系统,这将为交通领域提供高精度和高可靠性的测速服务。
3 基于危险驾驶系数的超速处罚方法
3.1 基于卫星导航车辆监控系统的超速处罚特点
基于卫星导航车辆监控系统是采用GPS技术对行驶车辆进行实时定位,利用无线电移动通讯网络将当前行驶车辆的行驶信息上传给后台监控系统,作为对监控车辆超速处罚的判定依据。
为此,基于卫星导航车辆监控系统的超速处罚具有以下特点:
数据上传频度:根据现有卫星导航行驶记录仪性能特点,拟取30s间隔作为数据上传频度
测速门限:通过大量实验数据表明,卫星导航的测速精度(95%置信度)优于1km/h.因此,拟取卫星导航的测速门限为1km/h.
持续超速时长的选取:考虑车辆在高速行驶过程中,可能会途径天桥或沿途出现信号遮挡,导致GPS卫星定位、测速结果可能会出现个别“野值”。通过大量实地跑车实验证明,出现“野值”数据点一般只会持续3~5s。同时,针对现有系统,卫星导航行驶记录仪数据上传的频度一般为30s,因此,判定车辆是否超速,拟选取连续的4个数据点,亦即时长2min,如果4个数据点速度值Vi均超过限速规定V0,方可判定超速,并根据公式α=V1/V0,求出超速百分比,反之,则未超速,这样可以规避出现“野值”数据的情况。
危险驾驶系数的判定原则:选取车辆在某高速T时段(拟取30min)内的上传数据,并确定该车在该时段内的累计超速时长百分比及超速百分比,根据公式

确定危险驾驶系数。
3.2 基于位置信息的危险驾驶系数
3.2.1 定义
由上述的超速处罚标准知道,通过当前车辆的超速百分比来实现对车辆的处罚,但是同时,由于基于卫星导航车辆监控系统可实现对车辆的实时监控,因此,可以得到对于某一监控车辆在某一监控路段内的累计超速时长。
所谓基于位置信息的危险驾驶系数就是综合考虑当前监控车辆在某监控路段内的超速百分比和累计超速时长百分比,将两者相乘得到的值。
3.2.2 危险驾驶系数的计算
如图1所示,x轴表示车辆行驶时间t(s),y轴表示当前卫星导航行驶记录仪测定的实时车辆车速V(km/h)。图中Vi表示当前某车车速、ΔV表示卫星导航的测速门限值、T表示某车在某高速路段的行驶时间、图中平行于x轴的虚线表示当前高速路段的限速值V0,Δt表示当前车辆持续超速时长。

图1 基于卫星导航的测速原理图
基于卫星导航的测速原理:选取某一高速路段某一段时间T内某车辆,卫星导航行驶记录仪实时测定当前车辆的行驶速度Vi,行驶记录仪按照一定的数据上传频度将当前信息上传给监控平台,监控平台根据当前车速Vi以及门限值ΔV(取下限值)与当前高速路段的限速值V0比较,如果超过限速规定,则超速,反之,则未超速。如果超速,则再根据该车持续超速时长,如果大于某一个规定值,则判定该车超速,并根据公式,求出超速百分比,反之,则判定未超速。最后根据选取的时间段T内,该车持续超速时长百分比以及超速百分比,根据公式(1),判定该车该时间段内在该高速路段的危险驾驶系数。基于卫星导航的测速原理如图1所示。
3.3 基于危险驾驶系数的超速处罚方法
从监控平台选取某车辆在某高速路段,时间段内该车的所有上传数据,根据当前路段的限速规定以及卫星导航测速精度的门限值(取下限值),锁定该车在受监控时段内的可能超速数据,并根据数据上传频度转换为持续超速时长,如果认为该车处于超速状态,并根据公式,求出超速百分比,反之,则未超速。根据选取的时间段内,该车持续超速时长百分比以及超速百分比,根据公式(1),判定该车该时间段内在该高速路段的危险驾驶系数。超速判决流程如图2所示。
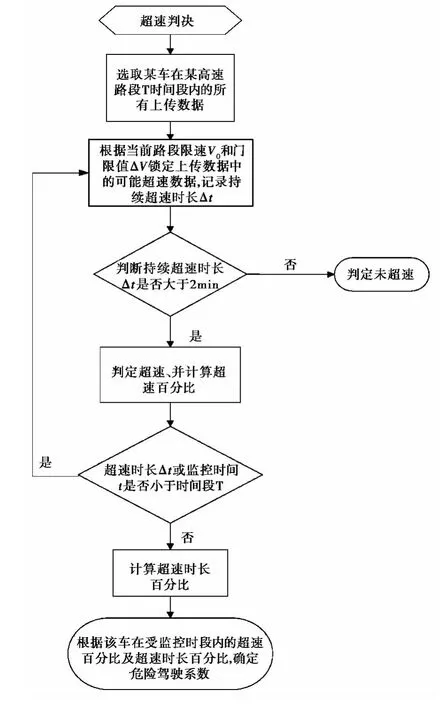
图2 超速判决流程图
4 结 论
在简述现有的超速处罚现状及超速检测方法的基础上,着重分析了基于卫星导航的测速方法,包括其精度误差、测速精度及其可靠性分析。在现有超速处罚标准的基础上,提出“危险驾驶系数”这一概念,并详述了“危险驾驶系数”的计算原理方法,并在此基础上,提出一套基于危险驾驶系数的超速处罚判决流程。此方法已在重点运输过程监控网络中进行了初步测试,结果表明了该系数能全面反映车辆驾驶行为的危害程度,该处罚判决流程对后续的基于卫星导航车辆监控系统的超速处罚判决有着一定的参考价值。
[1]王 鹏.基于GPS的营运车辆超速规律多维分析技术研究[D].重庆:重庆大学,2010.
[2]安福东.机动车的几种测速方式原理及性能的分析比较[J].警察技术,2003(3):33-35.
[3]向 前.黄龙水.杨益兴.GPS高精度测速研究[J].舰船电子工程2011,31(5):87-89.
[4]杨 龙.GPS测速精度研究及应用[D].北京:国家海洋局第一海洋研究所,2007.
[5]王甫红,张小红,黄劲松,等.GPS单点测速的误差分析及精度评价[J].武汉大学学报·信息科学版,2007,32(6):515-519.
[6]张宝峰,耿丽红.GPS单点测速误差分析与数据处理[J].天津理工大学学报,2010,26(3):13-15.
[7]何海波,杨元喜,孙中苗,等.GPS多普勒频移测量速度模型与误差分析[J].测绘学院学报.2003(2):79-82.
[8]何海波.高精度GPS动态测量及质量控制[D].郑州:解放军信息工程大学.2002.
猜你喜欢
一重技术(2021年5期)2022-01-18
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
中国交通信息化(2019年9期)2019-11-16
建材发展导向(2019年11期)2019-08-24
中国交通信息化(2019年12期)2019-08-13
中学生数理化·八年级物理人教版(2019年12期)2019-05-21
电子制作(2018年11期)2018-08-04
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
电子制作(2017年20期)2017-04-26
