
空气密度测量仪的研制与测试研究
2013-08-25 08:04崔成宇邓金祥王吉有原安娟刘国庆
物理实验 2013年12期
王 旭,崔 敏,周 琪,崔成宇,万 欣,邓金祥,王吉有,原安娟,刘国庆
(北京工业大学 应用数理学院,北京 100024)
1 引言
空气密度是一个重要的物理量,其测量在物化研究、质量与密度计量、制药、医院以及气象学等研究中有重要应用[1].空气密度测量最常用的方法有浮力法,声学法和温、湿、压法[2-4].浮力法是通过精确测量比较质量相等但体积相差较大的两物体的浮力差确定空气密度,利用浮力法测量空气密度具有装置成本高,过程复杂的特点,常用于测量精度要求较高的测试环境中;声学法是利用声场的改变引起空气压力的改变从而测定空气密度的方法,该方法测量精度低(不超过0.2%);温、湿、压法是通过测量空气的成分和温度、湿度、压力,通过查表或计算得出空气密度的方法.对高精度的测试系统温、湿、压法几乎具有和浮力法相同的测量精度.
根据国际计量局推荐公式[5],通过测量空气的温度、湿度和压强可求得空气的密度.目前,常用的测量方法是利用精度较高的温度计、湿度计和压力计分别测量空气的温度、湿度和压强,通过查表或计算的方法求得空气密度,但未见有设备能够同时测量获得空气的温度、湿度、压强和空气密度.本文将精度较高的温度、湿度和压力测量传感器集于一体,根据空气密度与三者之间的关系,通过单片机编程,将空气密度测量值直接显示,避免了繁琐的查表和计算,并可同时显示空气测量的4个重要参量(温度、湿度、压力和密度).本文介绍了该空气测量仪的设计原理,对空气密度进行了测量,并对测量结果进行了不确定分析.
2 原理分析
2.1 湿空气密度
地面大气通常含有一定量的水蒸气,即为湿空气.湿空气的密度ρ是干空气密度ρd 与水蒸气密度ρv 之和[4],即

其中,pd=p-pv,pv=φps,pd=p-φps.因此,
式中,Rd为干空气的气体常量[287J/(kg·K)],Rv为水蒸气的气体常量[461.5J/(kg·K)],pd为干空气的分压力,pv为水蒸气的压力,p 为湿空气的压力,T 为湿空气的绝对温度,φ 为湿空气的相对湿度,ps为饱和水蒸气分压力.
将Rd和Rv的值代入式(2)中,则湿空气密度为

在工程设计中,标准大气压下的饱和水蒸气分压力ps可根据空气的干球温度θ查表、查图或公式计算得到,但查表和查图较麻烦,往往不能满足精度要求,而纯理论推导出的公式又太复杂,(3)式的适用范围为0~70 ℃.由于标准大气压下的饱和水蒸气分压力ps与空气的干球温度θ有如下的关系[5]:

因此,根据式(3)和(4)即可求出湿空气的密度:
2.2 密度测量仪
式(5)指出湿空气的空气密度是关于温度θ、湿度φ 和大气压力p 的函数.基于此,在空气密度的测量仪中,利用传感器设计电路,测量空气的温度、湿度、大气压来求解出湿空气的空气密度并显示.利用DS18B20高精度温度传感器、DHT11湿度传感器和BMP085 大气压力传感器通过微型处理单元(MCU)组装了具有便携式、高精度和自动化数据处理功能的空气密度测量仪.其设计原理如图1所示.
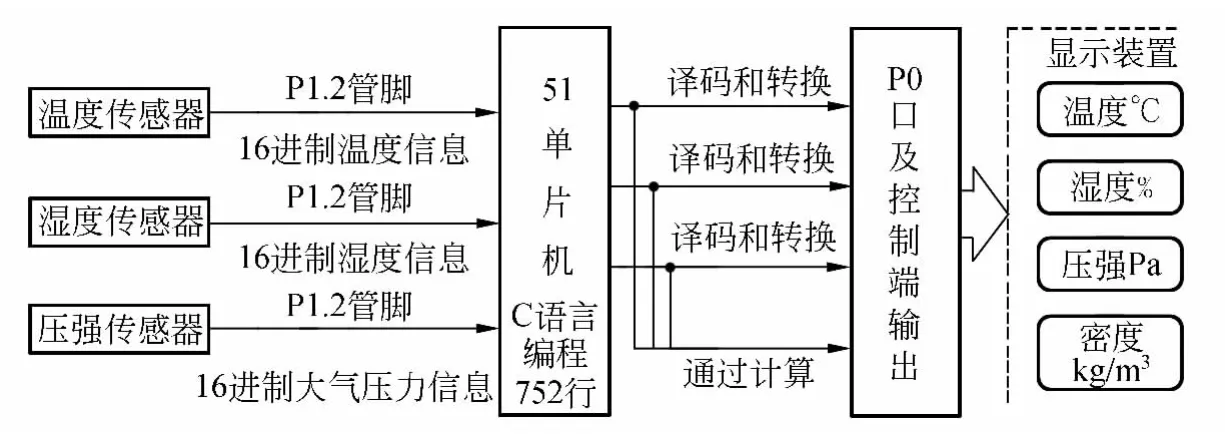
图1 空气密度测量仪设计原理框图
该密度测量仪装置的实物图如图2所示.单片机通过接收温度、湿度和大气压力传感器传来的数据信息,经模/数转换器接口送入微处理器,通过计算翻译为方便读取的信息,最后将温度、湿度、压强及密度信息显示在LCD1602显示屏上.
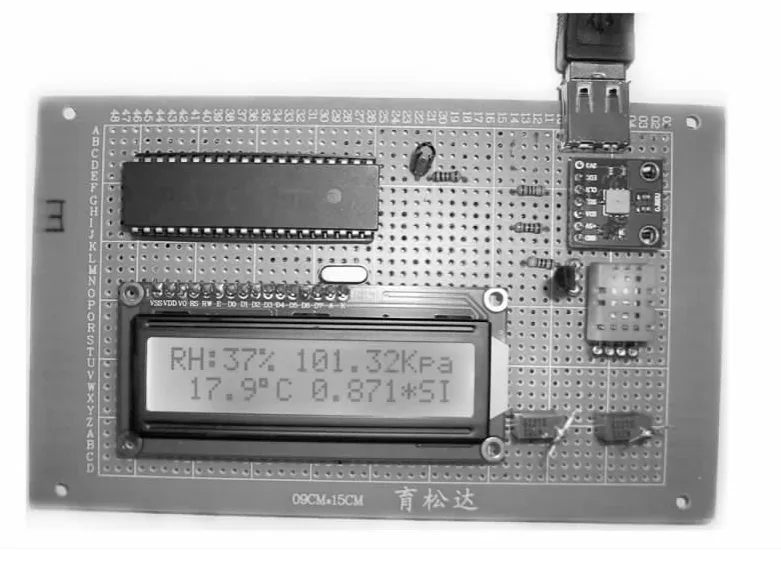
图2 空气密度测量仪实物图
3 实 验

图3 空气密度测量实验装置原理图
将空气密度测量仪置于透明玻璃干燥皿中,如图3所示.选择干燥皿作为测试空气的容器是考虑到其3个优点:1)将测量仪置于干燥皿内,由于干燥皿由透明玻璃制成,可在皿外观察测量过程和数据;2)干燥皿盖处涂上凡士林后,可保证测量容器的密封性,使测量过程中空气的分子数接近不变的;3)厚玻璃制成的干燥皿,在内部空气温度、湿度发生变化时,空气体积可保持不变.为了测量不同温度下的空气密度,将整个干燥皿水浴加热,置于热水盆中数十min,如图4所示,然后将热水盆取走,干燥皿空气温度下降,记录温度下降时不同状态下空气的温度、湿度、压强和密度.

图4 空气密度测量实验装置实物图
4 结果分析与讨论
4.1 空气参量测量
表1为使用自行研制的空气密度测量仪测量的不同状态下空气的温度、气压、湿度和密度.

表1 温、湿、压及空气密度随时间变化关系
干燥皿良好的密封性使空气分子数不变,质量不变,且厚玻璃器皿体积不随温度、湿度、压强变化,因此,空气密度不变,与表1中数据吻合,在测量时间内,空气的温度降低、压强、湿度及空气密度保持不变.
图5所示为干燥皿中空气压强随温度变化曲线图,图中压强随温度变化显示出较好的线性.根据理想气体状态方程,pV=nRT(p 为压强,V为体积,n为物质的量,R为气体常量,T为绝对温度),由于干燥皿中空气V,n,R 不变,压强与温度成正比.因此,验证了理想气体状态方程.
图5 空气压强随温度变化规律图
4.2 空气密度测量的不确定分析
根据不确定度推导的要求[6],由式(5)获得空气不确定度的传递公式为
根据所选传感器参量,温度传感器不确定度为±1.0 ℃,湿度传感器不确定度为±5%RH,大气压强传感器不确定度为±253Pa.根据表1的测量参量,获得了如表2所示的空气密度的不确定度.

表2 空气密度测量的不确定度
从表2可看出,空气密度测量的不确定度大约为0.1kg/m3,其中相比于A,B 因子,C 因子对密度测量的不确定度影响最大,而影响C 因子的主要因素有温度、湿度和大气压.通过理论分析发现,当湿度的不确定度降为Δφ=3%时,空气密度的不确定度为0.06kg/m3;当湿度的不确定度降为Δφ=2%时,空气密度的不确定度减小至0.04kg/m3.因此,为了减小空气密度测量的不确定度,可以采取降低湿度的不确定度Δφ 的方法,以减少C 因子对密度测量的影响.
5 结论
根据温、湿、压法的空气密度原理,结合单片机编程、温度、湿度、大气压传感器,研制出测量空气密度的仪器.该仪器能同时测量并直接显示空气4个重要参量的测量结果,即可同时测量空气中的温度、湿度、压强和密度.利用该空气密度测量仪测试了空气中的温度、湿度、压强和密度,并对密度测量结果进行了不确定度的分析和研究.测量结果较好地验证了理想气体状态方程;对空气密度测量进行了不确定度分析,得到了接近0.1kg/m3的不确定度,并研究发现空气湿度的不确定度对密度测量的误差影响最大.
[1]姚久民,王丽丽,客海滨,等.空气密度与气体普适常数测量实验的改进[J].物理实验,2011,31(12):24-26.
[2]黄焱,何松林.用单摆法测空气密度[J].实验室研究与探索,2010,29(2):35-37.
[3]罗志勇,刘子勇,刘吉萍,等.便携式空气密度精密测量仪的研制[J].计量学报,2001,22(1):52-56.
[4]周西华,王继仁,洪林.湿空气密度的快速准确测算方法[J].矿业安全与环保,2005,32(4):49-51.
[5]王启山.常见温度下饱和水蒸汽分压力的计算[J].天津理工学院学报,1986,12:40-43.
[6]邓金祥,刘国庆,原安娟,等.大学物理实验[M].北京:北京工业大学出版社,2011:8-15.
猜你喜欢
建材发展导向(2021年13期)2021-07-28
少儿科技(2020年2期)2020-05-13
可再生能源(2020年1期)2020-02-25
E动时尚·科学工程技术(2019年7期)2019-09-10
电子制作(2019年9期)2019-05-30
农村青少年科学探究(2019年11期)2019-03-28
阅读(科学探秘)(2019年12期)2019-03-25
中学生数理化·中考版(2018年11期)2019-01-31
科学与财富(2018年21期)2018-08-22
电子制作(2017年7期)2017-06-05
