
高速公路常发拥堵路段追尾事故风险实时预测
2013-08-16 13:50李志斌金茂菁徐铖铖
吉林大学学报(工学版) 2013年6期
李志斌,刘 攀,金茂菁,徐铖铖
(1.东南大学 交通学院,南京 210096;2.科技部 高技术研究发展中心,北京 100044)
0 引 言
高速公路瓶颈位置的交通需求大于瓶颈通行能力时,易产生车辆排队并向上游路段传播,此过程中运动波(Kinematic waves)活动频繁,交通流波动较大[1]。行驶车辆遇到减速波后被强制降低行驶车速,当车辆间距不足以完成减速行为时,追尾事故发生。因此,高速公路常发拥堵路段追尾事故风险较高。建立基于实时交通流数据的追尾事故风险实时预测技术,可以为动态交通管理和控制提供依据,对于降低常发拥堵路段追尾事故风险及提高行车安全具有显著意义。
以往研究多是根据高速公路线圈检测器数据建立实时事故风险预测模型[2-6]。此类数据包括每30s交通流速度、流量及占有率。但这些模型并不适用于常发拥堵路段追尾事故风险预测。部分学者采用碰撞时间[7-8]、停车距离指数[9-10]、个体车辆速度、车头间距[11]等指标衡量追尾事故风险,但该类方法需要个体车辆的轨迹数据,这无法从常规交通流检测器获得,导致这些方法在实际交通管理中的应用受到了限制。
文献[12-13]比较了不同交通流状态下事故风险,发现排队传播过程中事故风险是自由流状态下的4倍左右。文献[14]分析了诱发交通事故的运动波特性,发现运动波传播速度越快、运动波传播前后速度差越大,或者交通流处于半拥堵状态,则事故发生概率越大。国内有学者基于实时交通流数据的事故前兆特征变量建立了相关模型以预测高速公路实时事故风险[15-17]。
总之,以往研究没有针对高速公路常发拥堵路段建立运动波传播过程中追尾事故风险的实时预测模型,导致目前缺乏有效交通管理控制手段来预防运动波传播过程中常发的追尾事故。本文根据高速公路常发瓶颈上游路段运动波传播过程中车辆行驶轨迹特征和追尾事故发生的条件,采用解析法和统计学方法建立了衡量该类追尾事故风险的实时预测模型,采用实际数据验证了模型的有效性。
1 追尾事故发生条件
高速公路路段上车辆跟驰行驶过程中,前车突然减速可能导致后车无法在有效时间内完成减速行为,从而诱发交通事故。跟驰车辆减速过程中行驶轨迹如图1所示。前车在时刻t1开始减速,后车经过反应时间后在时刻t2开始减速,并在时刻t3速度降至与前车一致。
当满足以下条件时,发生追尾事故:

式中:da为前车完成减速后行驶距离;dDe为减速过程行驶距离;L为平均车身长度;H为相邻车辆间距离;db为后车速度下降前行驶距离。

图1 跟驰车辆减速过程行驶轨迹Fig.1 Trajectories of deceleration of car-following vehicles
式(1)可以改写为

式中:vb为减速前车辆速度;va为减速后车辆速度;a为车辆减速率(假设所有车辆一致);td为车辆减速时间。
如跟驰车辆在t2~t1时间内速度从vb减至va,追尾事故可以避免。时长t2~t1包括后车注意到前车并开始减速时长、后车减速反应时长及踩下减速踏板至车辆完全停止间的时长,假设为固定值。因此,式(2)中左侧值越小,追尾事故风险越大;反之亦然。
个体车辆信息(如H、vb、va)无法通过交通流检测器获得。但多辆车的集计个体信息可通过检测器数据进行估计。运动波传播中车辆行驶轨迹如图2所示。运动波在时刻T1达到下游检测器位置,在时刻T2达到上游检测器位置。图2中车辆行驶轨迹为图1中个体车辆行驶轨迹的宏观集计表示。根据图2所示,将T1至T2时段内通过上游检测器位置的N个车辆信息进行叠加,式(2)可以改写为

图2 运动波传播过程中车辆行驶轨迹时空图Fig.2 Time-space diagram of vehicle trajectories during propagation of kinematic wave

假设ΔT时间内上游检测器附近交通流处于均质状态,车辆间车头距离可根据上游位置交通流密度Du来替代,即H=1/Du-L。交通流检测器无法直接检测交通流密度,因此采用占用率计算交通流密度[1],即D ≈O/L,O为时间占有率。则式(3)可以表示为

式中:N(T1,T2)为在时间(T1,T2)内遇到运动波的车辆数;Ou(T1,T2)为在时间(T1,T2)内上游车辆平均时间占有率;vu(T1,T2)为在时间(T1,T2)内上游车辆平均速度;vd(T1,T2)为在时间(T1,T2)内下游车辆平均速度。
2 追尾事故风险预测
式(4)左侧表示运动波从上游传播到下游的时间内车辆追尾事故的风险,该值越大则风险越高。研究路段内运动波在相邻检测器间传播时间为3~8min,本文采用5min作为ΔT值进行分析。传播时间小于5min的情况下,本文预测的追尾事故风险略低于真实值。式(4)仅在vu>vd条件下成立,对该公式进行倒数转换,使该公式在区间[-∞,+∞]内连续且成立。假设平均车辆长度为定值,提出运动波传播过程中追尾事故风险指数R的解析式为


式中:J为一个检测周期内的时长个数(J=ΔT/Δt,Δt=30s为交通流数据检测周期);M 为车道数(如果路段内车道数不等,则将最小车道数作为M值)。
指标R可以衡量运动波传播过程中追尾事故风险。R值越大表示追尾事故风险越高。该指标仅反映了相邻检测器区间内5min平均交通流状态。实际交通流运行状态实时波动,较大交通流波动会产生更多危险状态,增加事故发生概率。因此,采用式(5)所涉及的参数的标准差来反映交通流波动情况。参数标准差σ计算公式为

令追尾事故发生时,Y值为1;无追尾事故发生时,Y值为0。则可用Logistic回归模型建立事故发生概率预测模型[3,6]。令P(Y =1)表示交通流状态导致追尾事故发生的概率,将指标R和各参数标准差作为自变量,建立Logistic回归模型如下:

式中:β为待估计参数值。
Logistic模型可估计变量odds ratio值。odds值表示事故发生概率除以事故未发生概率,即P(Y =1)/(1-P(Y =1))。某变量的odds ratio表示该变量增加一个单位导致odds值的变化幅度。
3 数据采集及分析
标定本文事故实时预测模型的数据应满足以下要求:①交通流检测器布设在高速公路常发瓶颈上游路段;②交通流检测器布设间距较小(通常小于1km);③交通流检测器提供检测周期为30 s的各车道交通流数据;④历史数据具有较长保存周期;⑤交通事故数据精确记录事故发生时间和位置。
采用美国加利福尼亚州I-880州际高速公路北向某10km路段上的数据进行分析。路段包含12个感应线圈交通流检测器,能够检测以30s为单位的各车道速度、车辆数及占有率。检测器布设间距为0.42~1.02km,平均间距为0.69 km。此路段下游为常发拥堵的瓶颈区,运动波活动频繁。研究路段内典型工作日的交通流状态如图3所示。拥堵常发生在早高峰和晚高峰时段,拥堵排队长度约10km。

图3 研究路段内拥堵传播及消散图Fig.3 Speed contour for the study segment
采用病例-对照(Case-control)方法进行模型标定[3,5-6,15]。交通流数据分为病例组(事故组)和对照组(非事故组)两类。对2006~2008年该路段内事故数据进行收集整理,剔除由于以下随机因素导致的追尾事故数据:①事故发生在恶劣天气下;②事故中驾驶员酒醉;③事故与行人、摩托车、动物及固定物相关;④事故发生在出入口匝道;⑤事故由于道路损坏、施工造成。
共341个追尾事故数据符合建模要求,事故发生前5min交通流参数作为病例组。对照组中交通流数据没有导致追尾事故。选择对照组数据时需要控制几类干扰因素,包括道路特征、限速、天气等[3,5-6,8]。本文对照组数据随机选择与事故相同路段及日期内除事故前5min之外其他时段5min的交通流数据。病例-对照样本比例设定为1∶4[6,15]。
4 模型标定及应用
为了减少对照组样本随机选择误差,随机选择多组对照组数据对Logistic模型进行参数估计。采用2006~2007年数据进行模型参数标定。表1为模型估计结果,从表中可以看出:10次估计中事故风险指标R和上游占有率标准差σ(Ou)在90%置信水平显著,各参数估计值相对一致且稳定。R值增加一个单位会使追尾事故odds值增加56.5%,σ(Ou)值增加一个单位会使追尾事故odds值增加38.1%。

表1 Logistic回归模型参数估计结果Table 1 Results from Logistic regression model
根据表1中参数估计的平均值,得到常发拥堵路段追尾事故风险实时预测Logistic模型如下:

采用该模型对路段内交通流运行状态进行敏感性分析,结果如图4所示,图中不同颜色的格子代表不同数值,图例中标出了同一颜色格子数值占所有格子数值总和的比例。根据模型估计的追尾事故概率将交通流状态划分为4级(A、B、C、D)。
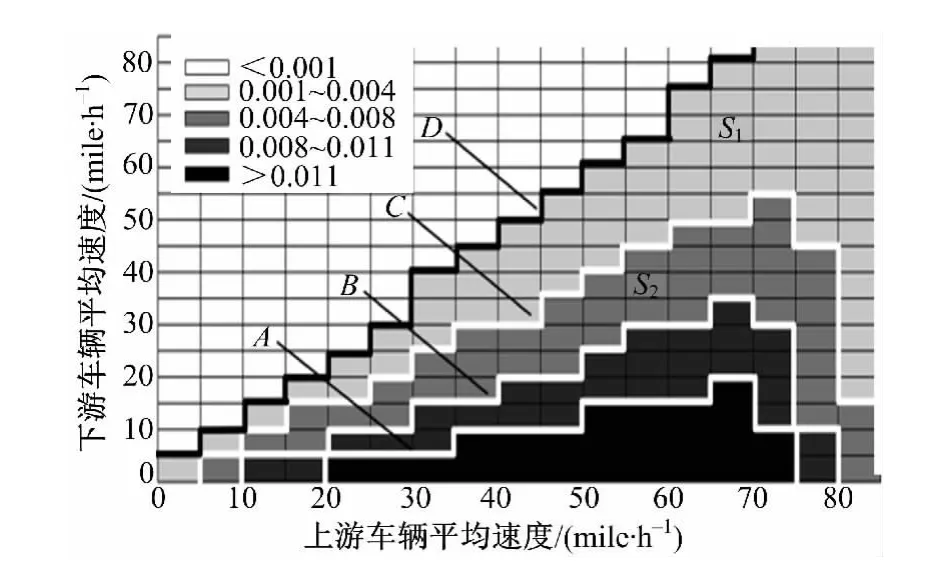
图4 模型敏感性分析Fig.4 Sensitivity analysis for the model
模型敏感性分析结果表明:追尾事故风险随上、下游车辆速度差的增大而增加,当上游交通流接近通行能力且下游交通流处于严重拥堵状态时,追尾事故风险最高。实际交通流运行过程中各状态出现频次不同,例如图4中状态S1平均每天出现129次,而状态S2平均每天出现8.5次。结合各交通流状态下事故概率和交通流状态发生频率,对研究路段2008年追尾事故进行预测。
图5(a)为模型预测事故风险分布,颜色较深的区域发生事故的风险越高;图5(b)为真实事故频次分布可以看出:模型预测事故发生的交通流状态与实际情况相符。交通流处于拥堵状态时事故数量最多,其原因为拥堵状态下事故风险较大且出现较频繁。尽管上游车辆速度大于下游车辆速度的交通流状态不常发生,但拥堵状态下仍有较多事故发生,此状态下追尾事故风险较大。由于自由流状态出现频率高,因此该交通流运行状态下亦存在一定事故风险。

图5 追尾事故预测模型验证Fig.5 Validation for rear-end collision prediction model
采用该模型对常发拥堵路段运动波传播过程中追尾事故风险进行评估。研究路段内某早高峰时期拥堵传播及消散过程如图6(a)所示,深色区域表示交通流运行速度低,白色区域表示自由流速度;追尾事故风险如图6(b)所示,深色区域表示该交通流状态具有较高的交通事故风险,浅色区域表示事故风险较小。结果表明,拥堵生成后追尾事故风险显著高于自由流状态,交通流从自由流状态向拥堵状态转变的过程中追尾事故风险最高,拥堵区域内部运动波的传播亦增加了追尾事故风险。

图6 运动波传播过程中追尾事故风险Fig.6 Rear-end collision risk for active kinematic wave
5 结束语
对高速公路常发拥堵路段追尾事故风险实时预测技术进行了研究,对运动波传播过程中个体车辆行驶轨迹特征及追尾事故发生条件进行了集计分析,建立了基于集计交通流数据的追尾事故风险指数解析模型,并根据真实交通流及事故数据标定了Logistic回归模型。结果表明,本文提出的追尾事故风险指数、上游交通流占有率标准差与追尾事故的发生显著相关,采用该模型对真实高速公路瓶颈区追尾事故预测结果符合真实情况。
[1]Daganzo C F.Fundamentals of Transportation and Traffic Operations[M].Oxford:Pergamon Press,1997.
[2]Abdel-Aty M,Uddin N,Pande A.Split models for predicting multivehicle crashes during high-speed and low-speed operating conditions on freeways[J].Journal of the Transportation Research Board,2005,1908:51-58.
[3]Abdel-Aty M,Uddin N,Pande A,et al.Predicting freeway crashes from loop detector data by matched case-control logistic regression[J].Journal of the Transportation Research Board,2004,1897:88-95.
[4]Lee C,Hellinga B,Saccomanno F.Real-time-crash prediction model for application to crash prevention in freeway traffic[J].Journal of the Transportation Research Board,2003,1840:67-77.
[5]Lee C,Saccomanno F,Hellinga B.Analysis of crash precursors on instrumented freeways[J].Journal of the Transportation Research Board,2002,1784:1-8.
[6]Zheng Z D,Ahn S,Monsere C M.Impact of traffic oscillations on freeway crash occurrences[J].Accident Analysis and Prevention,2010,42(2):626-636.
[7]Oh C,Kim T.Estimation of rear-end crash potential using vehicle trajectory data[J].Accident Analysis and Prevention,2010,42(6):1888-1893.
[8]Saccomanno F,Cunto F,Guido G,et al.Comparing safety at signalized intersections and roundabouts using simulated rear-end conflicts[J].Journal of the Transportation Research Board,2008,2078:90-95.
[9]Oh C,Park S,Ritchie S G.A method for identifying rear-end collision risks using inductive loop detectors[J].Accident Analysis and Prevention,2006,38(2):295-301.
[10]Oh C,Oh J,Min J.Real-time detection of hazardous traffic events on freeways methodology and prototypical implementation[J].Journal of the Transportation Research Board,2009,2129:35-44.
[11]Hourdo J,Garg V,Michalopoulos P G,et al.Realtime detection of crash-prone conditions at freeway high-crash locations[J].Journal of the Transportation Research Board,2006,1968:83-91.
[12]Hwasoo Y,Kitae Jang,Alexander S.Impact of traf-fic states on freeway collision frequency[C]∥The 89th Annual Meeting of the Transportation Research Board,Washington D C,USA,2010.
[13]Xu C,Liu P,Wang W,et al.Exploration and identification of hazardous traffic flow states before crash occurrences on freeways[C]∥The 89th Annual Meeting of the Transportation Research Board,Washington D C,USA,2010.
[14]Chung K,Jang K,Oum S,et al.Investigation of attributes of kinematic waves preceding traffic collisions[C]∥The 90th Annual Meeting of the Transportation Research Board,Washington D C,USA,2011.
[15]徐铖铖,刘攀,王炜,等.基于判别分析的高速公路交通安全实时评价指标[J].东南大学学报,2012,42(3):555-559.Xu Cheng-cheng,Liu Pan,Wang Wei,et al.Discriminant analysis based method to develop real-time crash indicator for evaluating freeway safety[J].Journal of Southeast University,2012,42(3):555-559.
[16]徐铖铖,刘攀,王炜,等.恶劣天气下高速公路实时事故风险预测模型[J].吉林大学学报:工学版,2013,43(1):68-73.Xu Cheng-cheng,Liu Pan,Wang Wei,et al.Using adverse weather conditions data to establish a real time crash risk prediction model[J].Journal of Jilin University(Engineering and Technology Edition),2013,43(1):68-73.
[17]吕宜生.基于实时数据的道路交通事故预测方法与仿真试验研究[D].哈尔滨:哈尔滨工业大学交通科学与工程学院,2007.Lü Yi-sheng. Highway traffic accident forecast based on real-time data and its matching simulation test[D].Harbin:School of Transportation Science and Engineering,Harbin Institute of Technology,2007.
[18]Gross F,Jovanis P P.Estimation of the safety effectiveness of lane and shoulder width:Case-control approach[J].Journal of Transportation Engineering,2007,133(6):362-369.
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
中国交通信息化(2022年5期)2022-07-23
工会博览(2022年5期)2022-06-30
建材发展导向(2019年11期)2019-08-24
中国交通信息化(2019年12期)2019-08-13
火力与指挥控制(2018年10期)2018-11-13
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
中国交通信息化(2017年9期)2017-06-06
电子制作(2017年10期)2017-04-18
