
小功率三相六状态无刷直流电机控制系统的设计
2013-08-10 09:59吴兴波
吉林化工学院学报 2013年7期
吴兴波,赵 亮,袁 旭
(吉林化工学院信息与控制工程学院,吉林吉林132022)
传统有刷直流电机以其优良的机械特性在运动控制领域得到了广泛的应用,但存在噪声大、干扰强、寿命短等弱点.近40年来,由于电机本体及其相关学科迅猛发展,加之电力电子技术与数字集成控制技术的兴起,以及性能优良、价格低廉的电子元器件的出现为制造无刷直流电机创造了基本条件[1].80年代在国际上开展了深入的研究,先后研制成方波无刷电机和正弦波无刷直流电机[2].20多年的时间里,无刷直流电机在国际上已得到较为充分的发展,无刷直流电机将在未来的几年中成为主导电机,并逐步取代其它类型的电机[3].本文介绍一种小功率三相六状态无刷直流电机的工作原理及其驱动电路的设计.
1 三相六状态无刷直流电动机的工作原理
1.1 无刷直流电动机的基本结构
无刷直流电动机的基本结构,如图1所示.主定子为相隔120°三相绕组,可提高磁通的利用率并使电机转动时更加平稳;主转子为永磁材料制成的磁极.电子换向线路实现直流电机中电刷的换流功能,实现了直流电机的无刷化,其导通规则由位置传感器发出的信号决定.位置传感器的转子随电机本体转子同步转动,从而得到转子位置状态信息[4].三相六状态无刷直流电动机的工作原理的关键部分就在于如何利用位置传感器发出的信号实现三相六状态的换流过程.

图1 无刷直流电动机的基本结构图
1.2 三相六状态的换流过程
采用三相六状态换流方式进行工作时,每一时刻均有两相绕组通电,为得到最大转矩,在每个状态下,两相绕组的合成磁势与主磁通的夹角平均值应尽量为90°.正转时换流过程如图2所示.

图2 正转时换流过程图

图3 电机换流过程时序图
从图2可以看出三相绕组的导通状态.与三相三状态不同的是在转向不变时,一个周期内每一相绕组内的电流会有正反两个方向,使电机材料的利用率与三相三状态相比有了很大的提高[5].三相绕组的换流时序如图3所示.
1.3 位置传感器工作原理
设计中,采用霍尔传感器作为位置传感器,传感器利用霍尔效应制成,当传感器于N极下时会输出高电平,S极下输出低电平,将传感器放在适当位置,根据输出电平的变化就可以得到磁极旋转位置.为得到均等的六个位置状态,可将三个霍尔传感器相隔120°放置,根据输出信号即可判断出转子当前处于哪个旋转状态.图4是位置传感器输出波形图.
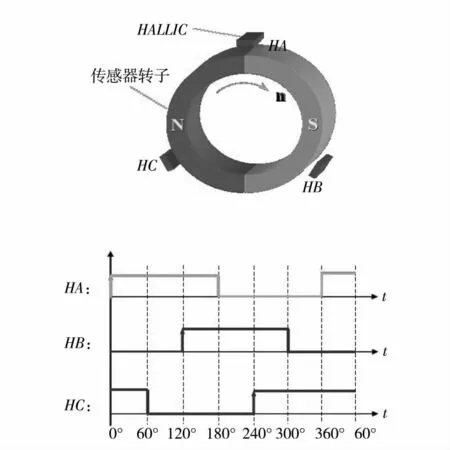
图4 位置传感器输出波形图
对比换流过程图与传感器输出信号可以得到位置传感器输出波形与绕组导通规律的对应关系如图5所示.

图5 位置传感器输出波形与绕组导通规律的对应关系图
1.4 绕组导通规律与主回路功率管触发信号的对应关系
定子供电采用三相桥式电路,因电机功率较小,又由PWM调速,故功率器件选MOSFET管,图6是A+B-(A+C-)触发示意图及导通绕组与导通功率管对应表格图.电机为Y连接时,要实现A+B-状态,只要将T1、T6导通即可,同理,要实现A+C-状态,只要将T1、T2导通即可.
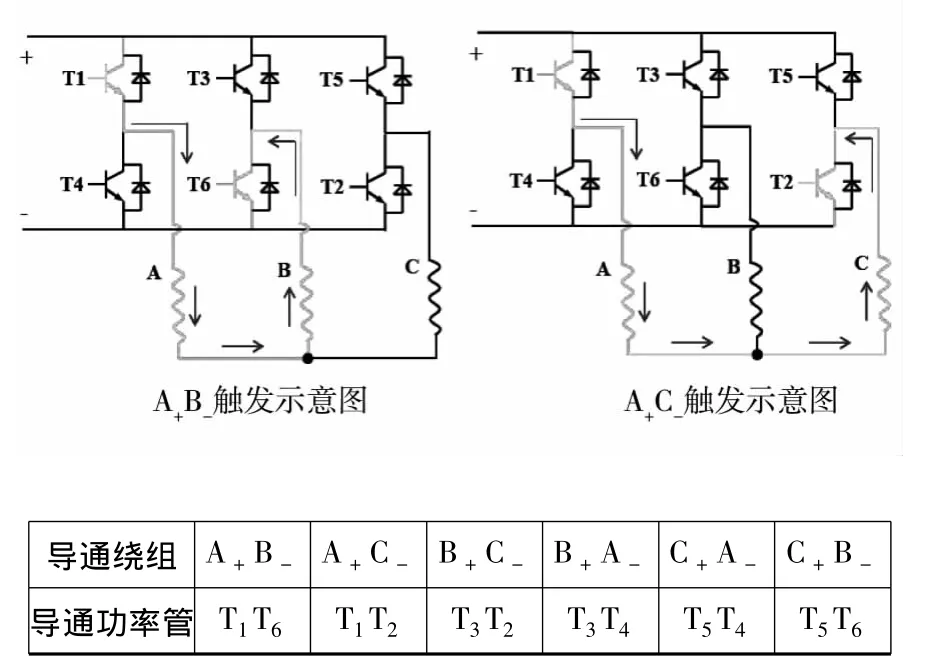
图6 导通绕组与导通功率管对应表格图
1.5 霍尔信号与主回路功率管触发信号的对应关系
通过以上分析得到正转时霍尔信号与主回路功率管触发信号的对应关系如图7所示.

图7 霍尔信号与功率管触发信号的对应关系图
2 三相六状态无刷直流电动机控制系统原理图
三相六状态无刷直流电动机控制系统原理图如图8所示.
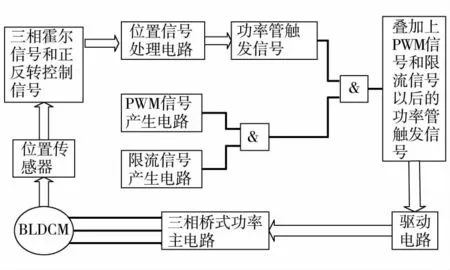
图8 三相六状态无刷直流电动机控制系统原理图
3 控制系统原理说明及逻辑电路图、位置信号处理电路、PWM信号产生电路
3.1 控制系统原理说明
根据前面无刷直流电机三相六状态运行的工作原理可以得到霍尔传感器位置信号与功率管触发信号的对应关系如图7所示.通过真值表可设计出满足要求的组合逻辑电路.实际电路中组合逻辑电路由GAL(G16V8MS)芯片实现.通过绘制逻辑电路图(见图9),编译后可得到相应的JED烧写文件.除采用画逻辑电路图的方法外,还可利用PROTEL内嵌的WinCupl通过编写CUPL语言[5]实现同样的逻辑功能并得到JED文件.
3.2 位置信号处理电路
由于霍尔传感器的输出采用OC门电路,需要加上拉电阻实现高电平输出.此外,还需对其提供5 V的工作电源.由于GAL(采用G16V8MS芯片)可方便地实现各种逻辑功能,故将功率管的触发信号与PWM相与这一过程也放在此处进行.IN6为PWM输入,IN5为正反转控制信号,14、15、16、19、23、27 管脚输出 T2、T6、T4、T5、T3、T1的触发信号(低电平有效),送至MOSFET驱动电路.最终得到位置信号处理电路如图10所示.

图9 逻辑电路图
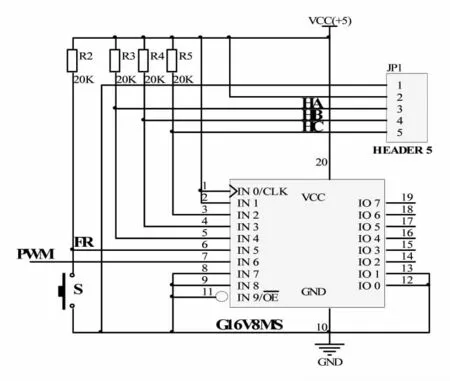
图10 位置信号处理电路图


3.3 PWM信号产生电路
电路图如图11所示.由NE555芯片构成的多谐振荡器,3引脚输出PWM信号,通过调节R9就可以调节占空比[6]实现调速功能,输出(PWM)送至GAL(G16V8MS)芯片,再经过MOSFET驱动电路,产生三相桥式主电路触发信号.
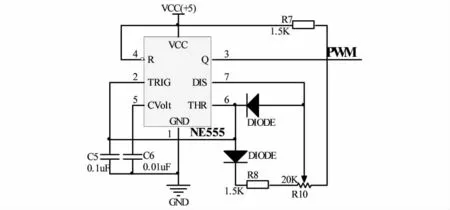
图11 PWM信号产生电路
4 MOSFET驱动电路及三相桥式主电路
4.1 MOSFET驱动电路
电路图如图12所示,驱动芯片采用IR2130实现[7].电路简单且驱动能力强,只需一个+15 V电源,芯片内部提供三个独立电源驱动上桥三个MOSFET管,自身电源则可直接为下桥驱动电路供电[8],二极管用于隔离电源,电容(10 μF)用于自举.IR2130自带限流[9]环节,9引脚即为信号反馈端,过流信号经分压后送到ITRIP(9引脚)进行比较,如果发生过流则关断MOSFET管,并使FLT(8引脚)输出低电平,点亮发光二极管,以示报警.通过调节R10可调节限流值的大小.改变串入输出端的栅极驱动电阻(20 Ω)可以改变MOSFET管的开通关断速度.
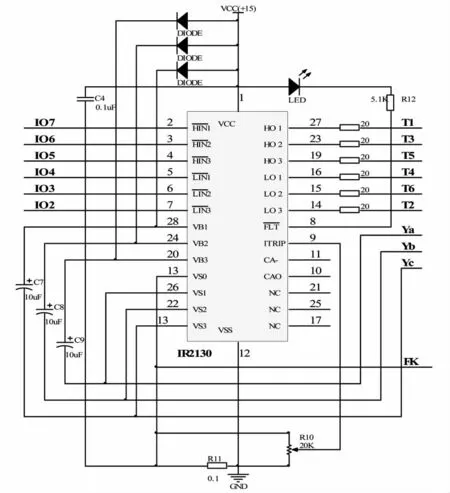
图12 MOSFET驱动电路图路
4.2 三相桥式主电路
三相桥式主电路采用MOSFET(IRF640)作为开关器件,输入电源电压为+24 V,电机绕组为Y型连接,可为各相绕组提供双向电源.IRF640内部已集成续流二极管,不必另设,但需自行添加栅源保护电阻(20 kΩ)以防静电击穿.电路图如图13所示.

图13 三相桥式主电路图
5 结 论
设计样机在驱动额定电压24 V时,输出功率可达18~20 W,速度为180~200 r/min,采用三相六状态的导通方式优点是电机材料的利用率高,驱动芯片采用IR2130好处是电路简单且性价比高.可实现电机的正反转控制,能利用PWM方式实现开环调速,电机运行速度平稳.通过增大驱动额定电压的数值和改换MOSFET管及驱动芯片型号也适用于中功率电动车驱动,非常具有实用性.
[1]贡俊.无刷直流电动机在工业中的应用和发展[J].微特电动机2000(5):15-19.
[2]曲家骐.展望21世纪的无刷直流电机转矩波动及消弱方法[J].电机技术1999(3):41-43.
[3]Zhu ZQ,Ede J.D,Howe,D,”Design criteria for highspeed brushless DC motors for sensorless operation”[J].Applied Electromagnetics& Mechanics,2002(15):79-87.
[4]S.D.Sudhoof,P.C.Krause,Operating modes of the brushless DC motor with a 120.Inerter[J].IEEE.Transaction on Energy conversion,1990,5(3).
[5]都伊林,詹剑.用CUPL硬件描述语言设计数字电路[J].设计自动化,2001(6):15-16.
[6]彭力,张凯,康勇,等.数字控制PWM逆变器性能分析及改进[J].中国电机工程学报,2006,26(18):65-70.
[7]毕庆,张纯江,闫朝阳.高性能六输出MOS栅极驱动器IR2130及应用[J].信息技术,2000(3):11-12.
[8]张国安,忠尼.EXB84]驱动模块的扩展用法[J].电力电子技术,1997,31(3):97-98.
[9]华伟.IGBT驱动及短路保护电路MS7969L研究[J].电力电子技术,1998(1):88-91.
猜你喜欢
大电机技术(2022年5期)2022-11-17
莆田学院学报(2021年5期)2021-11-13
哈尔滨铁道科技(2020年4期)2020-07-22
甘肃科技(2020年20期)2020-04-13
电子制作(2017年1期)2017-05-17
电测与仪表(2016年1期)2016-04-12
电测与仪表(2015年12期)2015-04-09
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01
电测与仪表(2014年14期)2014-04-04
