前轴载荷对电动客车EHPS系统的助力与节能性的影响
2013-08-01 11:22刘文光张中帆
重庆理工大学学报(自然科学) 2013年10期
陈 峰,何 仁,刘文光,张中帆
(1.江苏大学 汽车与交通工程学院,江苏 镇江 212013;2.江苏常隆客车有限公司,江苏无锡 214432)
近年来,得益于电控与电池技术的发展,纯电动客车作为新能源汽车的一种得到广泛研究[1-2],同时液压助力转向系统也被电动液压助力转向系统(electro hydraulic power steering,EHPS)所代替[3-6]。如今,国外通过在商用汽车上安装EHPS系统来调节转向电机的转速以改善助力特性,从而提高了燃油经济性和整车稳定性[7]。国内部分纯电动客车也安装了电动液压助力转向系统,在一定程度上改善了客车转向轻便性。但大部分客车采用的都是转向电机转速固定的液压助力转向系统,这使得客车在低速时转向吃力,也因为电机保持恒速而导致能量消耗增大。因此,有必要研发适用于纯电动客车的、节能效果更好的EHPS系统。本文通过建立纯电动公交客车EHPS系统的数学模型和基于AMESIM的仿真模型,研究了前轴载荷变化对转向性能的影响,设计了控制策略[8],满足了车辆对低速轻便性和高速良好路感的要求,为在纯电动客车上安装性能更优的EHPS系统提供了理论依据。
1 纯电动公交客车EHPS系统的组成和工作原理
本文研究基于复合电源的纯电动公交客车,其EHPS系统结构如图1所示。系统结构主要包括转向盘、复合电源、变频器、电动机、液压泵、油罐、循环球转向器、摇臂、直拉杆和车轮。

图1 纯电动公交客车EHPS系统结构
纯电动客车转向时,分频器根据电机转速、前轴载荷、车速和转向盘角速度传感器输入的信号计算出电机所需转速,将输入的复合电源调频、调压,并将已调频、调压的交流电源输入电机中控制电机旋转,进而控制液压泵输出流量和助力的大小。该系统满足了轻便性,兼顾了稳定性和快速响应性,同时还提高了转向节能性。
2 EHPS系统数学模型
将转向盘力矩引起螺母运动的力等效为螺杆对螺母的作用力,则EHPS系统可以分为机械转向器、电机、转向控制阀和控制器4部分。因此,为了便于研究,分别建立机械转向器模型、电机模型、转向控制阀模型和控制器模型,并在AMESIM中将各个模型连接起来进行仿真分析。
2.1 机械转向器模型
本文研究的是循环球转向器,忽略转向系统的间隙和摩擦。模型中螺杆、螺母和齿扇间的运动如图2所示。
图2 螺杆、螺母和齿扇间的运动
根据牛顿第二定律,螺母的受力平衡方程为

式(1)中:M1为螺母质量;x1为螺母位移;F1为左腔压力;F2为螺杆对螺母的作用力;F3为右腔压力;F4为齿扇反力。
螺母位移与转向盘转角之间的传动关系为

式(2)中:S为螺杆导程;θ为转向盘转角。
助力缸左右腔压力为

式(3)中:p5为左腔压强;p6为右腔压强;A为液压油的有效工作面积。
2.2 电机模型
纯电动公交客车采用三相异步电机,电机的每相电路如图3所示。
图3 三相异步电动机的每相电路
旋转磁场的每极磁通与转子电流相互作用产生三相异步电机的转矩为

式(4)中:T为异步电动机电磁转矩;K为与电机结构有关的常数;s为转差率;R2为转子每相绕组的电阻;U1为定子电路电压;X20为n=0时的转子感抗。
电动机转差率由式(5)可得。

式(5)中:n0为磁场转速;n为转子转速;f1为定子电路的电流频率;pj为电机磁场极数对。
根据力矩平衡原理,电机运动方程为

式(6)中:T1为机械负载转矩;T2为空载损耗转矩;pa为液压泵输出压强;q为液压泵排量。
2.3 转向控制阀模型
EHPS系统的转阀式转向控制阀等效模型如图 4 所示[7]。

图4 转阀式转向控制阀等效模型
根据图4可得流量平衡方程:

式(7)中:Qin、Qout分别为转向阀的进油流量、出油流量;Qi(1,2,3,4)为流经节流阀 i的流量;Cd为流量系数;Ai(1,2,3,4)为节流阀 i的节流面积;ρ为液压油密度;pin、pout分别为转向阀的进油压强、出油压强。
2.4 控制器模型
EHPS系统中的变频器接收前轴载荷传感器输入的信号,确定转向电机最大转速,再根据车速确定客车直线行驶时的电机转速。客车转向时,变频器根据转向盘角速度计算出电机所需转速并且通过PID控制[10]使电机准确、快速地达到目标转速,从而实时改变助力大小,并改善节能性。根据不同的前轴载荷,利用分段拟合的方法分别作电机转速与车速和转向盘转速的关系。图5为前轴载荷分别为47 500 N和70 000 N时三者关系的三次样条插值图[11],简化成函数关系式为:电机转速=f(前轴载荷,车速,转向盘角速度)。其中前轴载荷在64 400~70 000 N范围内。纯电动公交客车以速度v(15 km/h<v≤40 km/h)在城区行驶时,电机转速与车速和转向盘角速度的函数关系为:
3 EHPS系统仿真与结果分析
以某款12 m纯电动公交客车的EHPS系统为研究对象,在AMESIM中建立EHPS系统的仿真模型[10]。

图5 前轴载荷分别为47 500 N和70 000 N时电机转速与车速和转向盘转速的关系
3.1 低速转向助力特性分析
设定转向盘力矩按正弦变化,频率为0.2 Hz,幅值为12.5 N·m。图6为客车车速v=10 km/h时,不同前轴载荷对应的转向助力特性曲线。可以看出:随着转向盘力矩的增加,液压助力也逐步增大;转向盘力矩一定时,前轴载荷越大,EHPS系统所能提供的液压助力也越大,从而改善了客车低速转向轻便性。
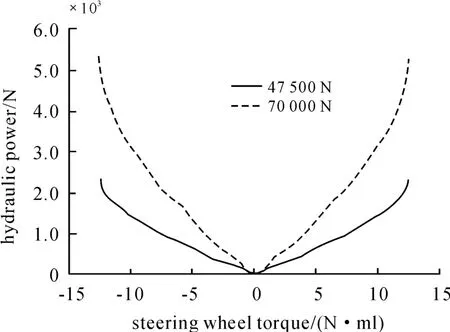
图6 车速v=10 km/h,前轴载荷分别为47 500 N和70 000 N时的转向助力特性
3.2 转向节能性分析
设定转向盘力矩为阶跃信号输入,阶跃输出值为12.5 N·m。图7为客车车速 v=10 km/h时,不同前轴载荷对应的电机消耗功率。转向时,客车EHPS系统根据前轴载荷变化实时控制电机输出转速。由图7可知:转向盘力矩一定时,前轴载荷越小,电机消耗功率越小,因此考虑前轴载荷变化的EHPS系统可提高转向节能性。同时,电机响应时间均在0.2 s内,表明此EHPS系统能满足助力响应快速的要求。

图7 车速v=10 km/h,前轴载荷分别为47 500 N和70 000 N时的电机消耗功率
4 结束语
本文根据纯电动公交客车EHPS系统的结构组成与数学模型,在AMESIM软件中建立了仿真模型,设计了控制策略,并对客车在不同前轴载荷时的助力特性、节能性和响应性进行了仿真分析。仿真结果表明:客车EHPS系统能针对不同前轴载荷改变助力特性,从而改善了转向轻便性,提高了节能性,为EHPS系统产品开发提供了理论依据。
[1]代国玉.KLQ6129GQEV2纯电动客车总体设计[J].客车技术与研究,2012(6):21-23.
[2]徐本祥.NPS6100SHEV增程式电动客车设计[J].客车技术与研究,2011(6):14 -16,24.
[3]HUR J.Development of an electric motor-driven pump unit for Electro-hydraulic power steering with 42V powernet[J].International Journal of Automotive Technology,2010,11(4):593 -600.
[4]施国标,林逸,张昕.动力转向技术及其发展[J].农业机械学报,2006(10):173 -176.
[5]Se-hyun Rhyu,Yong-kyoun Kim,Jun-hyuk Choi,et al.Development of an Electric Driven Pump Unit for Electro-Hydraulic Power Steering of 42V Automobile[Z].IEEE Digital Object Identifier.2007:791 -795.
[6]Zhu Ren-xue,Gao Lan-fang,Li Xue-zhi.Research on the energy-saving potentiality ofelectro-hydraulic Power Steering System based on energy flow[C]//2nd Internationl Asia Conference on Informatics in Control,Automation and Robotics.2010:415 -418.
[7]Roy McCann,Anh Le.Gain Scheduling Control in Commercial Vehicles with Electro Hydraulic Power Steering[J].SAE Paper,2008(1):2703.
[8]苏建宽,王继磊.电动液压助力转向系统控制策略及其能耗分析[J].机械设计与制造,2012(1):126-128.
[0]陈勇,何仁.电动液压助力转向系统仿真及试验研究[J].液压与气动,2009(10):29 -32.
[10]赵万忠,施国标,林逸,等.电动客车电动助力转向回正控制策略[J].江苏大学学报:自然科学版,2011(1):28-31.
[11]周宇,陈勇,刘文光.电动液压助力转向系统的协同仿真虚拟试验[J].机械设计与制造,2009(7):109-111.
猜你喜欢
农业装备与车辆工程(2022年8期)2022-10-31
南方农机(2022年10期)2022-05-14
专用汽车(2020年9期)2020-09-26
有色金属加工(2020年4期)2020-08-20
思维与智慧·上半月(2020年4期)2020-04-13
发明与创新(2019年31期)2019-06-20
装备制造技术(2018年8期)2018-10-17
锻造与冲压(2018年7期)2018-05-29
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10