
基于CCD传感器的点光源动态跟踪系统
2013-07-13 06:43王青强敦煌俊秋陆留平
电子设计工程 2013年4期
王青强,敦煌俊秋,陆留平,王 伟
(南京医科大学 江苏 南京 210029)
基于CCD传感器的点光源动态跟踪系统
王青强,敦煌俊秋,陆留平,王 伟
(南京医科大学 江苏 南京 210029)
系统是以TI公司的低功耗微控制器MSP430F149为核心,基于CCD传感器OV7670对点光源所在平面进行采样,利用微控制器将图像信息存储并进行简单的图像处理,显示在液晶上,再通过无线传输系统将信息反馈到追踪台上,步进电机在细分器的驱动下自动控制追踪台进行X/Y方向移动,以达到动态追踪点光源的目的。经过实际的测试和分析,CCD传感器采集信息准确,伺服控制系统运动精准,最终证实了系统的有效性和可行性。
MSP430;CCD传感器;自动跟踪;步进电机
随着人们对能源的需求,以及军事发展的需要,使点光源追踪成为一种发展迅速,较为成熟的技术。目前点光源追踪技术多种多样,使用较为广泛的有基于光敏三极管的点光源追踪系统,基于光敏电阻,光电池的点光源追踪系统,跟基于摄像头的点光源追踪系统。该技术应用前景非常广泛,例如太阳追踪发电系统,目前很多太阳能电池板阵列基本上都是固定的,没有充分利用太阳能资源,发电效率低下。据实验,在太阳能光发电中,相同条件下,采用自动跟踪发电设备要比固定发电设备的发电量提高35%[1]。其次在军事演练中,要求对目标实施精确打击,在导弹上装有实时动态点光源追踪系统,在该系统的作用下,对点光源目标进行精确地跟踪打击,能大大提高命中率。而CCD传感器具有性价比高,线性范围好,敏感度高,可检测较远距离,受外界其他因素影响较小的优点。在奥运打靶,道路监控,医疗行业中已广泛应用。针对该系统有如此广泛的应用,以及优良的性能,因此下面给出一种基于CCD传感器的点光源追踪系统。
1 系统的组成与结构
基于CCD传感器的点光源自动跟踪装置由高亮度LED模拟点光源,CCD传感器由OV7670的摄像头模块组成,图像处理单元由一片TI公司的低功耗单片机MSP430F149组成,无线通信模块由两片NRF905组成,主控器以及人机接口由一片MSP430F149单片机与12864液晶组成,用步进电机控制平台模拟追踪台。
整个系统的工作流程是在有点光源的情况下,CCD传感器探测到点光源并获取原始图像数据,再由单片机进行灰度化,滤波,二值化等图像处理后,转换坐标,通过NRF905传输坐标信息到主控制模块,一方面通过人机接口进行显示,另一方面控制追踪台进行实时跟踪。如图1所示。
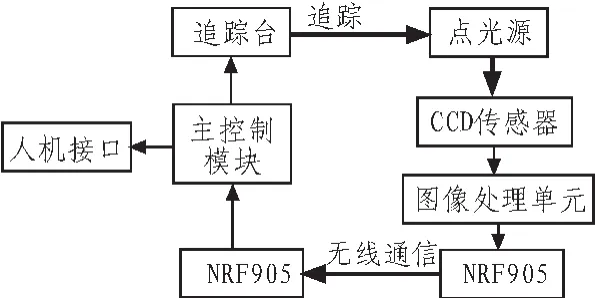
图1 系统框图Fig.1 Structure diagram of the system
2 系统硬件设计
2.1 主控制器及人机接口模块
主控制器由TI的超低功耗单片机MSP430F149组成,该单片机采用16位的总线,外设和内存统一编址,寻址范围最大可以达到64K,并且可以外扩展存储器;片内有精密硬件乘法器、2个16位定时器、1个12路的12位模数转换器,并且拥有较多端口,可以直接驱动负载[2]。同时,其为FLASH型,可以在线对单片机进行调试和下载,方便实用并且速度高,功耗低,可以在超低功耗模式下工作[3]。在本设计中利用其强大的运算能力,直接向步进电机驱动器以及液晶输出控制信号,可以很好地完成任务。
人机接口模块是由一块12864液晶组成,FYD12864_0402B是一种具有4位/8位并行、2线或3线串行多种接口方式,内部含有国标一级、二级简体中文字库的点阵图形液晶显示模块,利用该模块灵活的接口方式和简单的、方便地操作指令,可构成全中文人机交互图形界面。该模块用于显示当前点光源的位置坐标信息。
2.2 追踪模块控制电路
点光源所在平面距离控制平台的距离为3 m,采用64分的细分器驱动的步进电机控制追踪台的方向,单一可调节最细的角度为0.028度,由于最大角度基本小于五度,那么正弦函数和正切函数近似相等。在有效移动区域内的最精细控制,可以达到0.147 Cm。并且细分驱动器输出电流稳定,驱动能力强[4]。
步进电机的转速与脉冲信号的频率成正比,控制步进脉冲信号的频率,可以对电机精细调速控制步进脉冲的个数,可以对电机精确定位。细分是通过驱动器精确控制步进电动机的相电流实现的,与电机本身无关。其原理是,让定子通电相电流并不一次升到位,而断电相电流并不一次降为0(绕组电流波形不再是近似方波,而是N级近似阶梯波),则定子绕组电流所产生的磁场合力,会使转子有N个新的平衡位置(形成N个步距角)。SM-202A细分驱动器可以实现从1至64细分,系统选用64细分[4]。如图2所示。
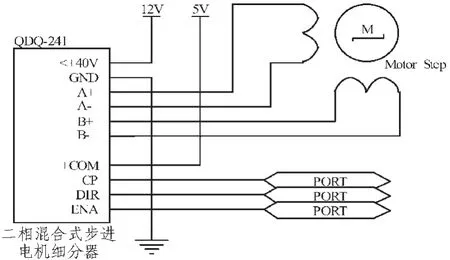
图2 步进电机与细分器的连接图Fig.2 Connection diagram of the stepper motor and subdivision
2.3 无线传输电路
无线传输采用NRF905,nRF905突出的优点就是收发模块电路设计简单。nRF905是挪威Nordic公司推出的一款单片射频发射器芯片,采用32引脚5 mm×5 mmQFN封装,工作于 433、868、915 MHz 3 个 ISM(工业、科学和医学)频道,其中国内433频段可以免费使用。nRF905由频率合成器、接收解调器、功率放大器、晶体振荡器、调制器等功能组成不需要外加声表滤波器也可以有良好的通信效果。nRF905使用SPI接口可以和任何MCU进行通信,其中地址、输出功率和通信频道可通过程序进行配置,所以可以用于多机通信。nRF905融合了ShockBurstTM技术,可以自动处理数据包字头,且内置CRC校验功能,确保数据可靠传输。nRF905功耗很低在以-10dBm的功率发射时,工作电流也只有11 mA而对应接收机的工作电流只有12.5 mA,芯片可以软件设置空闲模式、关机模式,易于节能设计。适合工业数据采集、无线报警及安全系统等诸多领用。
利用NRF905实现对采集的图像信息进行传送,在CCD传感器处与追踪台处各安置一个NRF905。
2.4 CCD传感器驱动电路
CCD传感器驱动采用芯片AL422B,AL422B是Averlogic公司的专用视频的FIFO,最大存储为384K X 8 bits,同时支持VGA,CCIR,NTSC,PAL等视频制式,两端独立的读写操作,支持不同速率的读写.根据CCIR.601协议,一场图像数字化后最大的数据量是220K X 16 bit,因此,采用的AL422B足够可以容纳完整的一场视频图像的数据量.采用这种大的FIFO的设计可以降低DSP对视频FIFO读写控制时序的复杂度,使整个视频图像处理流程简捷,同时减少控制信号[5]。其所有的寻址、刷新等操作都由集成在芯片内部的控制系统完成。特别适合高速摄像头与单片机的对接,使得低速的单片机能够读取到图像信号。如图3所示。
2.5 图像处理模块
由一片TI公司的C2000系列的DSP进行简单的图像处理,在CCD传感器采集到图像信息之后,DSP与传感器进行通信,获取原始图像信息,将图像进行灰度化,滤波,以及二值化处理后,提取出坐标信息,最后将坐标通过NRF905无线传输至主控制器。
3 软件系统设计
3.1 图像采集及处理单元
点光源检测由CCD传感器模块对点光源所在平面进行识别,在没有点光源的情况下,CCD传感器先采集一帧原始图像,进行自动校准,即提取一定的像素点,并将其灰度化后,取出平均值最为此后图像处理的阈值,达到减小误差的目的。当出现点光源时,CCD传感器再次采集图像,采集的图像在从站的控制下存入闪存卡内,通过NRF950无线传输将图像数据发送至单片机进行处理。
单片机先将图像进行灰度化处理,灰度化的方法有分量法,最大值法,平均法,以及加权平均法,在这里选用加权平均法进行处理,根据重要性及其它指标,将3个分量以不同的权值进行加权平均。由于人眼对绿色的敏感最高,对蓝色敏感最低,因此,按公式 f(i,j)=0.30R(i,j)+0.59G(i,j)+0.11B(i,j)对RGB三分量进行加权平均能得到较合理的灰度图像。其次因为图像主要是以椒盐噪声为主,所以对灰度化之后的图像进行中值滤波,通过从图像中的某个采样窗口取出奇数个数据进行排序,用排序后的中值取代要处理的数据。最后进行二值化处理,即设定一个全局的阈值,将图像的数据分成两部分,将大于阈值的像素群的像素值设定为黑色,小于阈值的像素群的像素值设定为白色。经过图像处理后获得点光源坐标,随后液晶显示当前点光源的位置,并控制追踪进行有效地跟踪。图4是图像采集处理流程图。
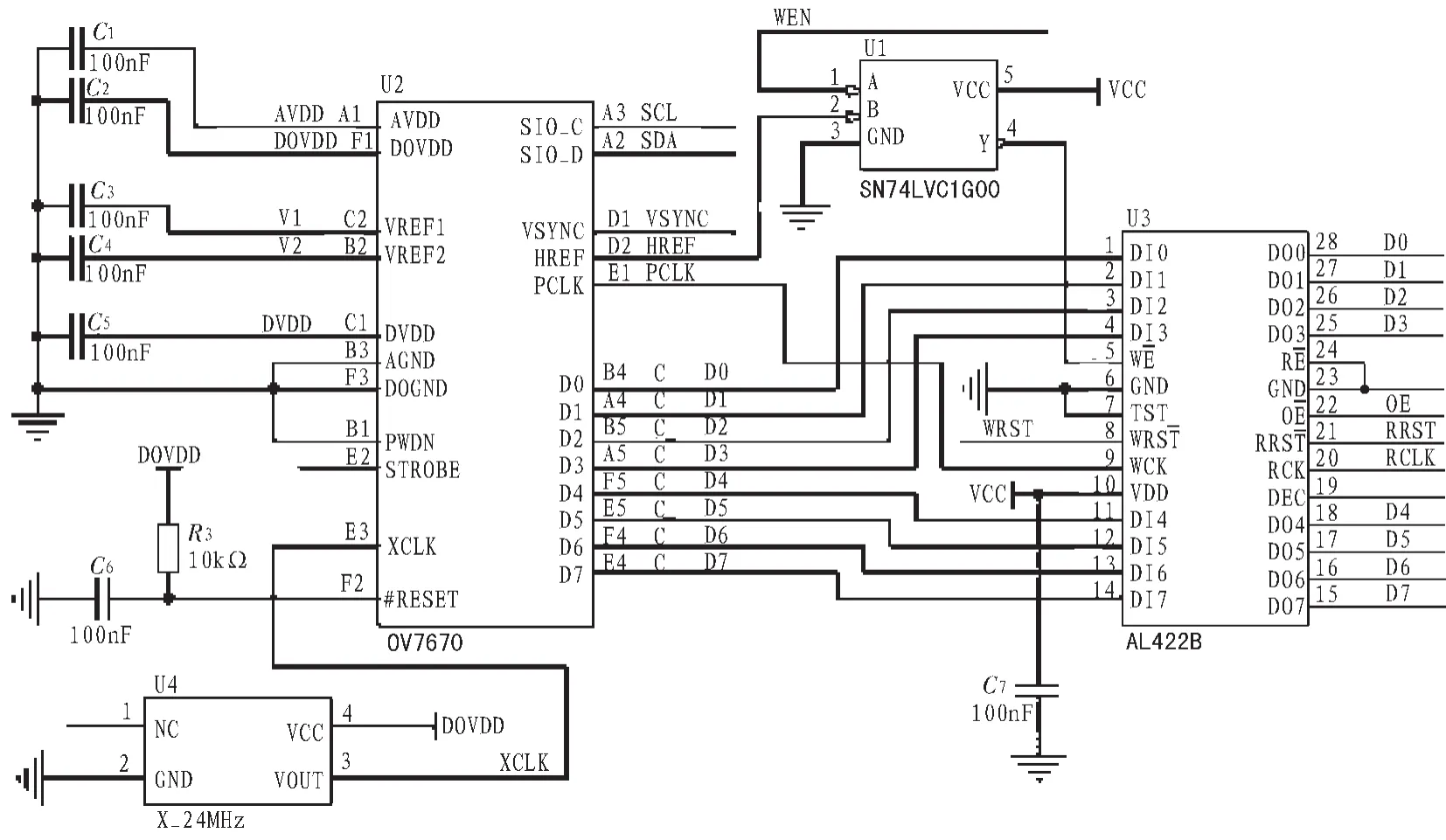
图3 CCD传感器驱动电路Fig.3 CCD sensor driving circuit
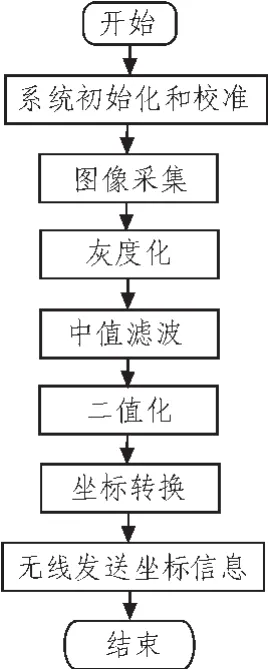
图4 图像采集处理流程图Fig.4 Flow diagram of image acquisition and processing
3.2 追踪台控制单元
在主控制器获取点光源位置坐标后,通过软件控制液晶以并行方式显示当前点光源位置坐标[5],并输出一定脉冲,控制步进电机进行X/Y方向移动,粗调至点光源附近,然后在进行细调,使追踪台精确指向点光源。图5是追踪台控制单元流程图。
4 实验结果和误差分析
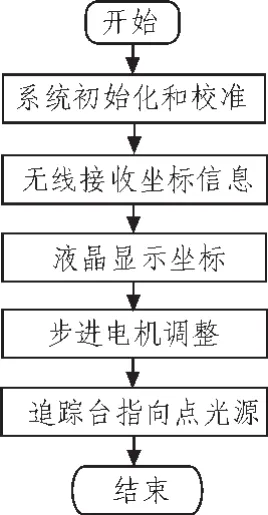
图5 追踪台控制单元流程图Fig.5 Tracking control unit flow chart
由自制的10环靶纸,且由圆心出发分成8等分扇形区域模拟点光源所在平面以便更好地描述位置信息,追踪台此此时所指方位由液晶显示。测试点光源所在位置与追踪台指向位置,计算误差。如表1所示。
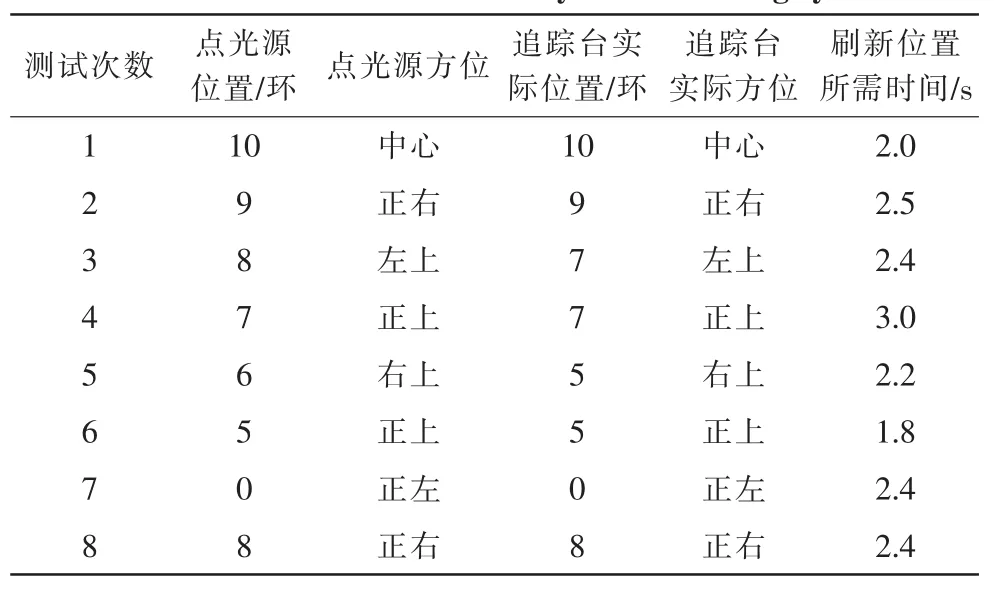
表1 点光源位置与追踪台实际指向位置Tab.1 Test result of the dynamic tracking system
经过实际测测,该系统在追踪时相对误差为0.25环,绝对误差为0.3%,平均刷新时间为2.3 s。误差主要产生在步进电机的自身特性,以及点光源平面的平整度,其次追踪台的物理结构,步进电机X方向移动为弧形,如果其运动为直线,则会产生误差[6]。
5 结 论
系统总体性能较好,追踪迅速,准确,由于采用了自动校准[7],所以环境对系统的影响很小,能适应各种外界的复杂条件。由于时间和知识的欠缺,系统在某些方面还是有待改进。在追踪台控制方面会有较小的误差,此误差可以通过软件设计解决,其次步进电机自身的物理特性,可以通过使用高精度的伺服系统[8]进行代替,则会有跟好的表现。
点光源追踪系统在未来的发展中会起到不可替代的作用,在能源利用,军事打击,医疗行业中均有涉及,而基于CCD传感器的点光源追踪系统将会以高性价比,高响应速度,超高精度的特点在诸多领域中占有绝对优势。
[1]侯长来.一种太阳自动跟踪装置的设计[J].现代机械,2006(1):66-68.
HOU Chang-lai.Design of an automatic sun-tracking device[J].Modern Machinery,2006(1):66-68.
[2]李广弟.单片机基础[M].北京:北京航空航天大学出版社,2010.
[3]沈建华.MSP430系列16位超低功耗单片机原理与实践[M].北京:清华大学出版社,2008.
[4]谢自美.电子线路设计实验测试[M].2版.武汉:华中科技大学出版社,2001.
[5]谢兴红,林凡强,吴雄英.MSP430单片机基础与实践[M].北京:北京航空航天大学出版社,2008.
[6]张东煜.一维驱动二维跟踪太阳跟踪系统设计[J].微计算机,2006,22(16):31-35.ZHANG Dong-yu.A dimension-driven design of two-dimensional tracking solar tracking system[J].Micro Computer,2006,22(16):31-35.
[7]孙茵茵.自适应复精度太阳跟踪平台[D].武汉:华中科技大学,2005.
[8]王锋.太阳光自动跟踪系统设计[J].实验技术与管理,2010,27(8):108-111.
WANG Feng.Design of Sun automatic tracking system[J].Experimental Technology and Management,2010,27 (8):108-111.
Dynamic tracking system of a point light source based on CCD sensor
WANG Qing-qiang, DUNHUANG Jun-qiu, LU Liu-ping, WANG Wei
(Nanjing Medical University, Nanjing 210029, China)
System is based on the low power MCU MSP430F149 of TI,Sampling point light by a CCD sensor OV7670.Then store the image in the flash memory card with the MSP430F149 and make simple processing to the graph,then display on the screen,after that through a wireless transmission system,the information fed back to the stepper motor control platform.With the subdivision drive,stepper motor automatically controlled the moment along the X/Y direction of tracking station so that the system achieve the purpose of dynamic tracking of the point light source.After the actual testing and analysis,information that the CCD sensor collected is accurate, movement of servo control system is precise, all these proved the effectiveness and feasibility of the system ultimately.
MSP430; CCD sensor; tracking; step motor
TP27
A
1674-6236(2013)04-0071-04
2012-10-16稿件编号201210105
王青强(1991—),男,江苏南京人。研究方向:电子医疗仪器。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
天津医科大学学报(2021年1期)2021-01-26
福建建筑(2019年11期)2019-12-23
电子制作(2019年15期)2019-08-27
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年18期)2018-11-14
自动化学报(2017年5期)2017-05-14
光学精密工程(2016年1期)2016-11-07
电气化铁道(2016年4期)2016-04-16
物理实验(2015年5期)2015-03-14
