卫星光通信粗瞄系统双绕组电机模糊滑模控制
2013-07-06 13:03陈兴林
黑龙江大学工程学报 2013年1期
陈兴林,崔 宁,王 岩
(哈尔滨工业大学 航天学院,哈尔滨 150006)
0 引 言
卫星光通信作为新兴的通信手段,以激光作为载波传递信息,能够满足大容量、高速率的数据传输要求,便于实现通信终端的小型化,是构建未来通信网络的基础。在光通信系统中,捕获、瞄准和跟踪(PAT)技术是关系到通信链路建立和保持的关键技术,而粗瞄系统正是完成PAT任务的核心部分[1-2]。伺服控制电机是粗瞄系统的执行机构,它的可靠性对整个卫星激光通信终端极其重要,控制电机一旦发生致命故障,整个通信终端就将毁掉。无刷直流电机故障易发部位主要位于驱动控制系统和电枢绕组中,为了提高电动机的可靠性,电机专家做了各种尝试。针对这些常见故障,双通道无刷直流电动机被适时提出,它是对可靠性薄弱部件引入余度结构,以此来提高系统的可靠性。这种结构可以使电机正常工作时,采用双通道驱动模式,电机出现故障时,也能够工作在单通道驱动模式,因此显著提高系统的可靠性[3-4]。粗瞄终端将给系统引入轴承摩擦,并且粗瞄终端口径较大,摩擦力矩干扰明显,是影响系统控制精度的主要干扰源,克服和抑制它对系统的影响也是控制器设计中着重要考虑的问题[5-6]。
1 双通道无刷直流电机模型
双通道无刷直流电动机的出现极大地提高控制电机工作的可靠性,它的具体结构是在电动机定子上安装两套星型连接的三相集中绕组,两套绕组互差30电角度。
如果两组功率放大电路的电源和驱动控制电路独立,就可以实现真正的双余度控制。这时如果流过两套绕组的电流相同,那么每套绕组产生的电磁转矩是电机输出转矩的1/2。
粗瞄控制系统采用完全双余度的控制策略,即电机正常工作时,两套绕组同时输出电磁转矩,电机出现故障时,未出现故障绕组可以继续工作,电机容错运行。双通道无刷直流电动机的主要结构是两组PWM逆变电路和两套电枢绕组,双通道无刷直流电动机结构原理图见图1,其状态方程为:

其中m0=L2-M2;J为电机转子及负载等效转动惯量;Ke为反电势系数;Us为相电压矢量;Is为相电流矢量;B为电机等效粘滞阻尼系数;is1、is2为两套绕组正向通电的相电流;Us1、Us2为功放电流直流母线电压;M为绕组相互之间的互感;L为电感系数;R为各相等效内阻;ω为电机转子机械角速度。
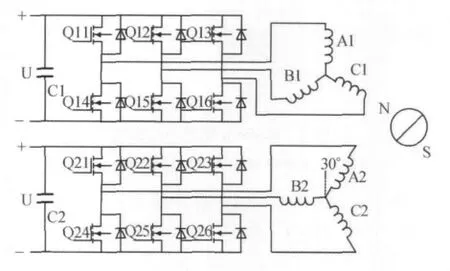
图1 双通道无刷直流电动机原理图Fig.1 Schematic of brushless electric motor with dual channels
由式(1)容易得到电动机单通道工作模式下的数学模型为:
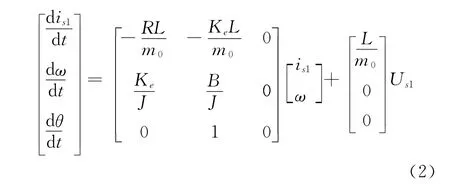
观察式(1)和式(2)可见,电动机故障运行模式时,绕组相互之间的互感消失,电动机的反馈矩阵和输入矩阵都发生变化。
2 伺服系统摩擦模型描述
电动机转子上的干扰力矩是控制系统产生误差的主要原因。在各种干扰力矩中,尤其是低速情况下,摩擦力矩是造成转子静态精度和动态跟踪误差的主要因素,甚至影响到系统的稳定性。按照电动机转子速度的不同,可以把摩擦分为4部分:静摩擦区、边界润滑区、部分液体润滑区和全液体润滑区。在已提出的摩擦模型中,以Stribeck曲线是最为著名[7],Stribeck模型曲线见图2。
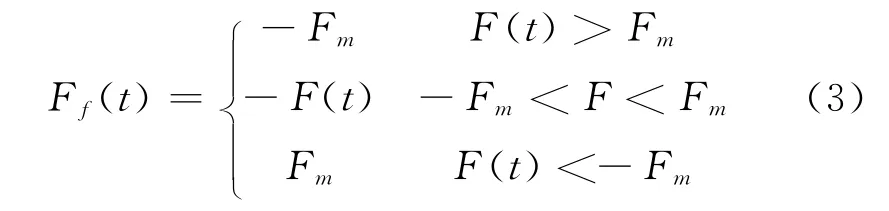
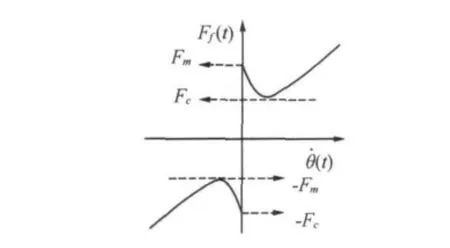
图2 Stribeck摩擦模型曲线Fig.2 Curve of stribeck friction model

式中F(t)为电磁转矩;Fm为最大静摩擦力;Fc为库伦摩擦力;(t)为电机角速度;α、α1为非常小的正常数。
3 滑模控制器设计
将粗瞄控制系统设计为三环控制模型,内环为电流环,中环为速度环,外环为位置环。电流调节器是用传统的PI控制,本文不再详述。速度调节器和位置调节器是用模糊滑模控制设计。将电动机的状态模型进行简化,当电动机工作在双通道模式时,其状态方程可简化为:

当电动机切换到单通道工作模式下时,其状态方程可以简化为:

令x1(t)=e=θ-θ*,x2(t)==ω,式(5)和式(6)可以简化为:


由于粗瞄控制系统中引入了电流环,它能够抑制电磁干扰及电机参数摄动,因此控制电流变化很小,现假定≤0.1,即有:

下面求取模糊滑模控制器中的等效控制和切换控制,首先选择滑模控制器的切换函数为s(X)=c1x1+c2x2,求出模糊滑模控制器的等效控制ue为:

最后,求出模糊滑模控制器的切换控制us为:

利用求出的等效控制和切换控制,作为模糊滑模控制器的控制输出,就能够保证粗瞄控制系统的稳定,但是它无法消除滑模控制引起的抖振现象。下面对粗瞄控制系统中引入模糊控制量,用来消除滑模控制中的抖振现象。
4 模糊控制器设计
由于滑模控制输出不连续,导致滑模控制系统产生抖振现象,系统的参数摄动范围及外界干扰的大小决定了抖振的剧烈程度。抖振现象会影响控制系统的控制性能,严重时还会使系统无法正常运行[8]。本文在滑模切换控制的基础上增加模糊控制,模糊控制能够柔化输出控制信号,即跳变的输出控制信号连续化,削弱或者避免一般的抖振现象。模糊滑模控制中把切换函数s(x)及其导数(x)作为模糊控制器的输入,把模糊控制器输出uf作为电机控制量进行输出。
表1给出了完整的模糊控制规则表,根据系统距滑模面S的偏差及偏差变化率的模糊输入值E和EC,经过模糊推理后,得到一维模糊控制量U,解模糊化采用重心法,即以隶属度作为加权系数计算得到加权平均值,且把它作为控制输出的精确量。系统控制过程中,采用模糊化因子Ke、Kec将测得的偏差和偏差变化率由实际论域转化到模糊集论域内,采用清晰化因子Ku将模糊输出转化为实际控制量输出。

表1 模糊控制规则表Table1 Fuzzy control rule table
5 模糊滑模控制仿真分析
利用matlab的simulink工具箱,将滑模控制和模糊控制相结合,对双通道无刷直流电动机建立模糊滑模控制进行仿真,分别对双通道和单通道两种工作方式下对粗瞄控制系统进行仿真。
图3(a)和图3(b)分别表示双通道工作模式下粗瞄控制系统的阶跃响应曲线及阶跃响应误差曲线。图4(a)和图4(b)分别表示单通道工作模式下粗瞄控制系统的阶跃响应曲线及阶跃响应误差曲线。观察图3和图4,双通道工作模式下粗瞄控制系统的阶跃响应达到稳态值的时间是0.16s,单通道工作模式下粗瞄控制系统的阶跃响应达到稳态值的时间是0.18s,可以发现单通道工作模式下系统的动态响应变化很小。这说明模糊滑模控制器鲁棒性较好,能够保证电动机工作模式切换后,维持系统继续正常运行。

图3 双通道工作模式下阶跃响应仿真曲线Fig.3 Simulation curve of step response on Dual channel mode
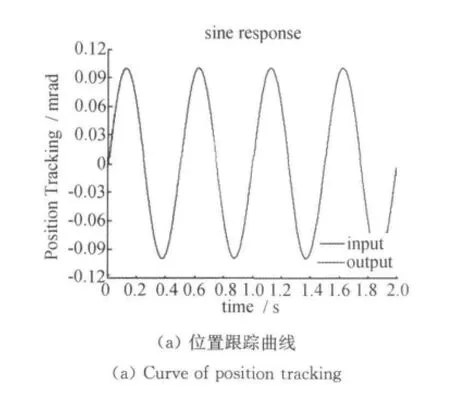
摩擦干扰对粗瞄控制系统的精度影响很大,利用本文求得的模糊滑模控制算法,在双通道工作方式下,对含摩擦环节和不含摩擦环节的粗瞄控制进行位置跟踪仿真,图5(a)和图5(b)分别表示不含摩擦环节时粗瞄控制系统的位置跟踪曲线及位置跟踪误差曲线,图6(a)和图6(b)分别表示含摩擦环节时粗瞄控制系统的位置跟踪曲线及位置跟踪误差曲线。
观察图5,0.18s之后,粗瞄控制系统的跟踪误差降为1urad以内,系统跟踪精度较好,在0.18s内系统的最大跟踪误差为7urad;观察图6,0.18s之后,粗瞄控制系统的跟踪误差降为1 urad以内,系统跟踪精度较好,在0.18s内系统的最大跟踪误差为12urad。比较图5和图6,0.18s之后,系统的跟踪误差几乎相同,只是在0.18s内含摩擦环节时的系统跟踪最大误差曲线要比不含摩擦环节系统跟踪最大误差大5urad。这表明模糊滑模控制算法对摩擦干扰的抑制能力强,动态响应更快,系统控制精度高,完全可以满足粗瞄控制系统的要求。



6 结 论
本文根据卫星光通信系统的特点,提出用双通道无刷直流电动机作为控制电机,为其建立数学模型,并基于模糊滑模控制策略对控制系统做了仿真。用模糊滑模控制器控制双通道无刷直流电动机,设计了稳定可靠的模糊滑模控制器,抑制控制系统电机参数的剧烈摄动,保证系统稳定。分别对双通道和单通道工作模式进行了对比分析,其阶跃响应达到稳态值的时间分别为0.16s和0.18s,系统在单双通道工作时动态响应变化小,鲁棒性较好。又对双通道工作模式下有无摩擦环节的情况进行了对比分析,含摩擦环节时的系统跟踪最大跟踪误差只比不含摩擦环节系统最大跟踪误差大5 urad,表明该算法抑制干扰能力强,并且满足控制系统精度要求,适合在空间环境中工作。
[1]于思源,马 晶,谭立英.自由空间激光通信技术发展趋势分析 [J].无线光通信,2004,(12):47-50.
[2]陈兴林,郑艳红,王 岩,等.星间光通信扫瞄捕获过程分析 [J].哈尔滨工业大学学报,2009,(11):34-38.
[3]谭建成.多相无刷直流电动机绕组连接拓扑结构的分析 [J].微电机,2012,45(2):1-9.
[4]周元钧.双绕组无刷直流电动机的数学模型与转矩特性 [J].电工技术学报,2004,19(4):12-16.
[4]刘丽兰,刘宏昭,吴子英,等.机械系统中摩擦模型的研究进展 [J].力学进展,2008,(2):201-213.
[5]宋申民,宋卓义,陈兴林,等.卫星光通信粗瞄系统非线性摩擦的神经网络补偿 [J].航空学报,2007,28(2):358-364.
[6]刘 强,尔联洁,刘金琨.摩擦非线性环节的特性、建模与控制补偿综述 [J].系统工程与电子技术,2002,24(11):45-52.
[7]Lu Xiaobin,Khonsari M.M.The Stribeck curve:experimental results and theoretical prediction [J].Journal of Tribology,2006,128(4):789-794.
[8]Liu Xiaodong,Wu Yunjie,Liu Baiting.Research of adaptive fuzzy sliding mode control for motor servo system [J].Advanced Science Letters,2012,6(1):855-858.
猜你喜欢
现代临床医学(2022年5期)2022-09-28
成都信息工程大学学报(2021年4期)2021-11-22
昆明医科大学学报(2021年4期)2021-07-23
天津教育·下(2018年9期)2018-07-13
系统工程与电子技术(2016年2期)2016-04-16
电子设计工程(2015年16期)2015-02-27
电力自动化设备(2013年11期)2013-09-18
城市道桥与防洪(2013年8期)2013-03-11
电气电子教学学报(2012年1期)2012-10-12
探测与控制学报(2012年1期)2012-08-27