海底固定布放基阵阵形测量实验研究
2013-07-05 16:31高山吕冰张自丽孟彧仟葛辉良
声学与电子工程 2013年2期
高山吕冰张自丽孟彧仟葛辉良
(1.海军驻杭州地区军事代表室,杭州,310012;2.第七一五研究所,杭州,310012)
海底固定布放基阵阵形测量实验研究
高山1吕冰2张自丽2孟彧仟2葛辉良2
(1.海军驻杭州地区军事代表室,杭州,310012;2.第七一五研究所,杭州,310012)
在未进行阵形测量的情况下,采用基于预定模型的阵列宽带波束形成算法会导致波束分裂、测向不准确甚至算法失效,因此有必要对阵形进行测量。采用远场辅助声源法可进行阵形测量,该方法在阵列远场条件下发射LFM脉冲信号,同时记录各阵元输出信号,通过对各阵元信号的相关分析得到阵元间相对时延差,由此计算出基阵阵形。海上试验结果表明,利用该方法可准确实现海底固定布放基阵的阵形测量。
光纤水听器阵列;时延估计;阵形测量
海底固定布放线列阵在海洋噪声源监测和跟踪中有广泛应用。在实际的海洋环境中,难以将基阵布放成理想的直线型,且随着海洋环境的变化,如潮汐、海流等,其阵形也有可能发生改变。采用基于预定模型的波束形成算法,在未知阵形的情况下会导致波束分裂、测向不准确甚至算法失效,因此有必要对阵形进行测量。
对于柔性阵的阵形校准,通常的做法是在阵列上面安装多个定位传感器,比如航向传感器、深度传感器等,通过传感器数据可以得到比较准确的阵形且实时性较好,但无疑增加了系统的复杂度,可靠性也会下降[1]。本文中我们采用辅助声源法,即利用已知位置的声源进行阵形测量,该方法需要知道参考声源的位置,这在实际中可以通过GPS进行比较精确的测量。其代价较小,可以准确测量出阵形。具体实现时,采用远场辅助声源在两个不同位置发射信号进行阵形测量。
1 测量原理
在使用远场辅助声源法进行阵形测量中,在基阵远场S1和S2位置处发射已知信号。假设水听器阵列的参考阵元位于原点O,P为待计算位置的阵元。如图1所示[2]:
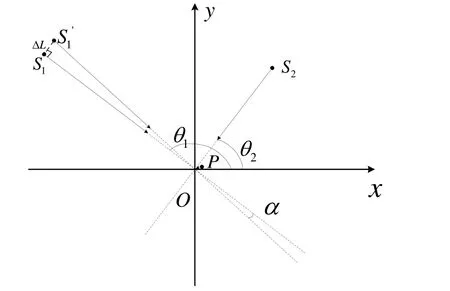
图1 远场辅助声源法阵形测量原理

由此方程,容易得到:
式(1)、(2)中1θ、2θ可以利用声源的GPS坐标和基阵布放时给出的基阵原点GPS坐标计算得到。由于风、流等的影响,声源实际位置、基阵原点位置都与实际位置有偏差。这两种位置都会使入射方向的计算值与实际值产生偏差。以声源位置偏差为例,如图1中S1为实际发射位置,令最大偏差为ΔL。当⊥时,位置偏差对方向角影响最大。
在实际测量过程中,声源位置离基阵约4 km,GPS定位误差约在10 m左右,位置偏差引起的方向角偏差α可以忽略。由于是在远场条件下进行,根据前面的分析,认为θ1、θ2的估计误差很小,可以忽略不计。那么P点坐标(x,y)的估计误差主要是由τ1、τ2的误差带来的,为:
令误差上限值为Δτ,即|Δτ1|≤Δτ、 |Δτ2|≤Δτ,那么式(5)即是:
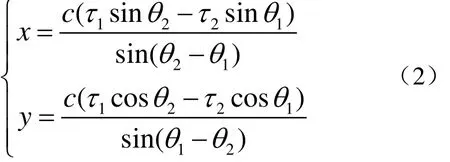
可以看出,在声源方位角和声速已知的情况下,只要根据各个阵元接收到的信号计算出它们相对于参考阵元的时延即可估计出阵形。为了减小估计误差,试验中两个声源的方位角θ1、θ2最好相差90º,此时阵元位置测量的误差Δx<2cΔτ、 Δy<2cΔτ。
2 时延估计
时延估计是计算阵列中不同水听器接收到的同源信号之间由于传输距离不同而引起的时延差,在估计阵列各阵元相对位置时最重要的就是计算时延差,时延估计精度是影响阵元相对位置精度的重要因素。时延估计主要利用不同阵元接收的同一声源发射的信号之间存在一定的相关性,通过求取两个信号之间的相关性,获得不同阵元间的时间延迟。利用相关器对信号进行分析时,需要信号有较宽的频带才能获得一定的时延精度。
假设阵元i接收到的1、2号声源信号为和,其中i=1,2,…,N(N为阵元数目),将1号阵元作为参考阵元,建立坐标系,将其放置在原点位置,发射信号S1和S2时各阵元相对1号参考阵元的时延分别记为和,易知和都为0。由公式(2)可以看出,在已知声源方位角和声速的情况下,只要估计出各个阵元相对参考阵元的时延即可估计阵列中各个阵元相对参考阵元的位置[3],时延估计流程图如图2所示。

图2 时延估计流程图
(1)数据滤波
根据发射信号的频率范围对接收数据进行滤波,减小发射信号频段以外的噪声对后续相关性分析的干扰。
(2)升采样,提高时延测量精度
为了减小时延测量误差带来的阵元位置误差,在进行相关性分析前,采用升采样的方法提高测量分辨率。若原始数据采样率为5 kHz,升采样到50 kHz后,阵元的时延测量分辨率减小到原来的1/10。该方法可以解决基阵信号采样率较低带来的测量误差。
(3)相关分析,寻找峰值
相关运算的定义为:

由于是同一发射声源,各个阵元接收到的信号间存在一定相关性,将各个阵元信号与参考阵元信号进行相关运算,通过查找峰值位置得到相对时延。将阵元接收到的信号依次与参考阵元信号做相关,结果记为。即:

(4)计算相对时延
通过(3)得到的是各个阵元信号的到来时刻,通过以下式子得到它们相对参考阵元的时延:

上式中,fs代表原始采样率,M为升采样的倍数。
3 海上试验验证
2011年6 月在中国南海海域进行岛基被动声呐探测系统项目海上试验,其中阵形测量部分采用了本文所述方法。基阵位置和发射声源位置如图3所示。
两条光纤水听器阵列成一定夹角布放在海底,分别记为1#阵和2#阵,各个阵元标称间距为0.7 m,单条阵列长度约48 m。声源发射点S1和S2近似成90º布放,离待测阵列约4 km。试验时选择天气较好、海面风浪不是很大的时段,两声源发射已知参数的线性调频信号,记录各个阵元接收到的信号。阵形测量结果表明1#阵阵形良好,基本成直线形。2#阵列在假定阵列为直线的情况下宽带波束形成出现严重的波束分裂现象。对2#阵采用前面所述方法进行阵形估计。图4中给出了校准后的2#阵阵元相对位置示意图,可以看2#阵阵形与直线相差甚远。
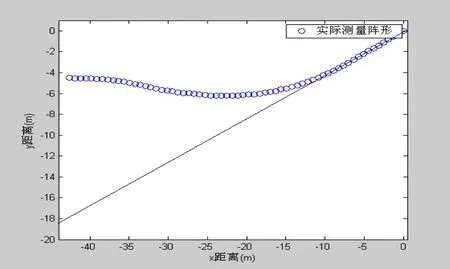
图4 2#阵阵形测量结果(黑色直线表示假定的直线阵形)
为了验证对2#阵的阵形测量结果,利用在A2点(见图3)发射的宽带噪声信号数据,采用阵形测量前的阵元位置数据进行波束形成,结果如图5(a1)、(a2)所示。图5(b1)和图5(b2)给出了采用测量得到的阵元位置数据进行波束形成的结果。

图5 阵形测量前后结果对比图
由图5可看出,采用测量后的阵形数据得到了正确的波束形成结果,波束的能量幅度得到了显著提高。这表明该方法能够准确地给出各个阵元相对于参考阵元的位置,测向精度获得了明显改善。
4 结束语
本文采用远场辅助声源法进行阵形测量,在两个约成90º夹角的阵列远场位置处布放声源,发射已知参数信号,同时记录各个阵元输出信号进行时延估计,由此计算得到阵列各阵元相对位置。分析表明在远场条件下,声源的位置误差对阵元相对位置的测量影响很小。在岛基被动声呐系统海试中采用该方法准确地给出了各个阵元的相对位置,解决了因阵形带来的波束分裂等问题,阵列的测向精度较之前有很大提高。
[1] 牛嗣亮, 梁迅, 倪明, 等. 岸基水听器阵列阵形估计方法研究[J]. 声学与电子工程, 2006(增刊):7.
[2] 汪俊, 吴立新, JIM LYNCH, 等. 一种基于时延估计的双辅助声源阵形校准方法[J]. 声学学报, 2007, 32(2): 166-167.
[3] PASTORE T J. Array element localization using broadband pulses[R]. Technical Document 2749, 1995.
猜你喜欢
电声技术(2022年3期)2022-04-28
中国测试(2021年4期)2021-07-16
合肥工业大学学报(自然科学版)(2020年11期)2020-12-05
应用科技(2020年1期)2020-06-18
测控技术(2018年9期)2018-11-25
水下无人系统学报(2018年5期)2018-11-09
弹道学报(2016年4期)2016-12-14
火控雷达技术(2016年2期)2016-02-06
西北工业大学学报(2015年3期)2015-12-14
声学技术(2015年1期)2015-09-07