
太阳光实时复合跟踪系统的研究
2013-06-21 09:03曹健宁
长春大学学报 2013年4期
曹健宁,王 菲
(长春理工大学 光电工程学院,长春 130022)
在科技与经济高速发展的今天,能源已经成为至关重要的条件之一。然而,地球上很多不可再生资源已经消耗殆尽,所以发现和利用新能源已经成为了人们关注的重要问题。近些年,太阳能的发展越来越受到人们的关注,其清洁环保、取之不尽用之不竭等诸多优点倍受人们的青睐[1]。
早在90年代初期,德国和美国等一些发达国家就已经研制出简单的太阳能跟踪系统,并且推出了太阳能厨房。不过那时的太阳能跟踪装置只是东西方向的单轴运转,南北方向只能通过手动调节,极为不便并且精度不够,对太阳光的利用率也不高[2]。但是在2006年,Accion公司建立了西班牙最大的太阳能电站,整个装置包含了400个太阳能跟踪托盘,14400个太阳能电池板,能够根据太阳的不同位置全天跟踪太阳光,到目前为止达到了世界的先进水平[3]。在我国,早在1992年也已经推出了太阳灶自动跟踪系统。近些年,太阳光已经广泛应用于我国各个领域,国家气象局研制的FST全自动太阳光跟踪器,成功的应用于太阳辐射的观测。太阳能热水器,太阳能电池板已经成功的进入了个人家,为人们储存热量或者发电[4]。因此,我国的太阳能技术也已经站在了世界的先进水平行列。
不过,对于太阳能的利用还存在着很多不妥的地方,跟踪精度不高,跟踪条件受天气的影响等很多因素降低了太阳能的利用率。我们设计了一种结构简单、成本低、利用率较高、长期稳定的太阳光实时跟踪系统。该系统可以对多种天气下的太阳光进行准确的跟踪,可保证较大的光电转换率。
1 系统设计的总体方案
太阳光跟踪系统主要是由光电转化模式和太阳光运行轨道跟踪模式两种跟踪系统组成,可加强系统的稳定性、提高太阳光利用率。晴天时,先启动太阳光轨道跟踪,使装置大致对准太阳光的方向,达到探测器的跟踪范围。再启动光电跟踪,对太阳光进行精确定位。阴天时,系统启用太阳光轨道跟踪模式继续跟踪,当天气阴转晴时,系统又再次转入光电跟踪。
该系统的光电跟踪系统主要是用四象限探测器做为接收装置,以C8051F040单片机作为核心,将接收到的太阳光光信号转化成电信号后,进行放大、滤波,输入到单片机中进行处理,由单片机输出驱动信号控制步进电机做出相应的跟踪运转。图1是该系统的基本原理框图。
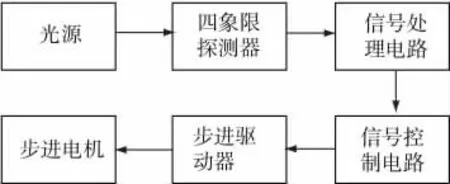
图1 系统基本原理图
太阳运行轨道跟踪模式根据太阳运行轨迹来跟踪太阳光,太阳轨迹位置由被测地点的经度、纬度和标准时间来确定。在经过大量的实验和总结后,如果采用太阳光轨道跟踪有4种参数是最为重要的。分别是太阳赤纬角δ,太阳时角ψ,太阳高度角H和太阳方位角T。
在设定跟踪地点和基准零点后,前两种参数有固定的公式可以很容易的计算出具体数值,后两种参数太阳的高度角和方位角是由控制系统按照太阳的地平坐标公式自动运算,然后太阳每分钟角度变化的数据传输的单片机中,由单片机发送驱动信号,对太阳光进行高度和方位双轴的跟踪。天黑后,系统自动停止跟踪。
2 探测器的选择
光电跟踪模式中,传感器的选择极为重要,它关系到整个系统的跟踪精度和准确性。我们选用GT111型四象限光电探测器,其本身为N型设计,密封陶瓷封装,拥有六只管脚,一只接地,一只接偏压,另外四只管脚分别接四象限探测器的四个光敏二极管。它具有光敏面积大、响应速度快、可靠性高、精确度较高等优点,十分适用于本系统[5]。
2.1 四象限探测器的工作原理
四象限探测器是由四个性能完全相同的光敏电阻按照直角坐标的要求排列成四个象限坐落在一个芯片上,当太阳光照射其表面时,每个象限所受到的光照面积的大小与每个象限中光敏电阻所输出的电流的大小是成正比的,当四个象限光照强度相同时,四个光敏电阻所输出的电流信号是相同的。当四个象限的光照强度不同时,四个象限的光敏电阻所输出的电信号就会有明显的差异[6]。由此可以推断出目标方位并进行跟踪。
2.2 光斑半径取值范围的研究
光斑的大小和四象限探测器有效面积的大小直接影响探测器输出电流变化,并形成有效测量范围,如果光斑的取值不当,探测器不能有效的利用太阳光,那么会直接影响系统对太阳光跟踪的精度和准确性[7]。下面对光斑的取值范围做一下讨论。

图2 光斑直径与四象限探测器的半径相同
如图2所示[8],当光斑处于l时,探测器没有电流输出。当光斑向右移动时,探测器电流输出渐渐增大。当光斑移动到2时,此时的电流输出最大。当光斑过了2处继续向右移动,那么二、三象限的照射面积就开始减少,电流输出也同时开始减少,一、四象限内负值电流开始增加,当光斑移动到3处时,光斑照射在四个象限的面积相等,探测器这时输出为零,误差值为零。如果再向右移动,一、四象限的照射面积就会大于二、三象限的照射面积,电流输出值为负值。直到光斑移动到4处,一个完整的光斑就照射在一、四象限,探测器的电流输出达到负的最大值。当光斑继续向远端移动,探测器的输出电流逐渐变小,移至5处探测器输出为零。
图3、图4[8]分别是光斑直径小于和大于四象限探测器半径的示意图,不难看出这两种情况在2-3,5-6范围内都有一段直线,都没有充分的利用太阳光,所以跟踪的灵敏度都被很大程度上的降低了。
综上所述,当光斑直径等于探测器的半径时时,即充分利用了光照能量,又获得较大的有效测量输出电流变化的范围,所以是最佳的选择。
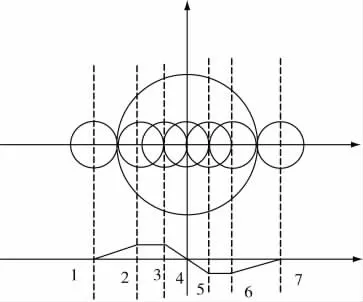
图3 光斑直径小于四象限探测器的半径

图4 光斑直径大于四象限探测器的半径
3 系统硬件设计
该系统的硬件电路主要是由放大电路、滤波电路、单片机C8051F040、步进电机驱动、步进电机、LED显示、按键、时钟等所组成。首先设计出硬件电路的原理框图。如图5所示。

图5 系统硬件框图
在整个硬件系统中,选取的单片机是C8051F040,其本身具有可靠性高、运算速度快、扩展功能强等优点,完全满足于本系统的要求。我们设计一个接收装置,将接收到的太阳光形成一个直径与四象限探测器半径相等的圆形光斑,原因前面已经进行了分析,这里不再重复。当太阳光照到探测器上时,探测器会输出四路微弱的光电流,要用放大器将信号放大。
由于在探测器输出的信号中存在着电压的纹波、光响应度、感光面积、暗电流和结电容等参数,这会直接影响到单片机对步进电机的控制,导致单片机不能输出精确的信号。所以,在将信号放大后我们需要一个低通滤波器,在信号进入单片机之前,处理掉电压的纹波,保证电路的正确运行。
信号进入C8051F040单片机。经过单片机的数据处理,给出太阳的方位角和高度角的电压偏差信号(也就是太阳光斑偏离中心的距离),通过单片机控制步进机的转动使两个角度的电压偏差值趋于零,这样就会达到太阳光实时跟踪的目的。存贮芯片我们选用的是AT24C32,它可以保存每一时刻探测器输出信号的数据。如果发生突然断电这种意外,该芯片仍然可以保存断电前一刻的太阳方位角和太阳高度角的数值,以便再次正常工作时可以用来作比较,计算两次的角度差值,对步进电机进行控制,能够精确的跟踪太阳光。
4 系统的软件设计
如图6所示为系统的软件流程图。
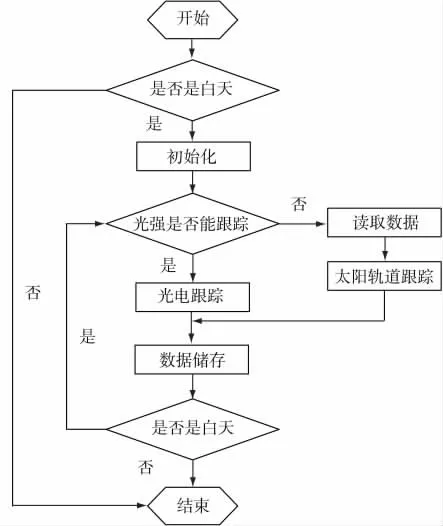
图6 系统软件流程图
接通电源之后,系统会判定是否在正常的工作时间段内,如果是夜晚则该系统自动结束。如果是白天,系统自动进行初始化,这里包括看门狗电路。系统先进行太阳光轨道跟踪,单片机自动计算太阳的高度角、方位角,对太阳进行粗定位,使其达到光电跟踪的范围。随后系统进行光电跟踪模式,将接收到的微弱光电流进行I/V转换、放大、滤波,输入到单片机中进行处理,给出控制信号来控制步进机对太阳的方位和高度进行精确的跟踪。
5 结语
本文提出了一种太阳光实时跟踪系统,该系统采用光电跟踪和太阳光轨道跟踪两种跟踪模式。光电跟踪部分以单片机C8051F040为控制核心,通过四象限光电探测器对太阳光进行接收装换,由处理电路进行放大、滤波,最后由单片机输出电机驱动信号,控制步进电机运转。太阳光轨道跟踪则是由系统自动计算太阳的高度角、方位角等相关参数,对太阳进行定位,由控制系统根据太阳每一时刻的角度变化来发送驱动信号,实现太阳光跟踪。两种跟踪模式相互补充,不需要过多的控制,运行稳定,跟踪精度高。可广泛应用于地下建筑、无窗建筑、矿业和勘探等场合,为提高太阳光利用率提供了重要的依据。
[1]日本太阳能学会编.太阳能的基础和应用[M].上海:上海科学技术出版社,1982.
[2]Soteris A Kalogirou.Design and construction of one ax is sun tracking system[J].Solar Energy,1996,57(6):465-469.
[3]高春燕,李俊民,刘彬彬.Visual Basic程序开发范例宝典[M].北京:人民邮电出版社,2006.
[4]徐问灿,袁俊,严伟,等.太阳能自动跟踪系统的探索与实验[J].物理实验,2003,23(9):45-48.
[5]胡勋良,强建科,余招阳.太阳能光跟踪器及其在采光中的应用[J].电子技术,2003,30(12):8-10.
[6]Ernesto.Doebelin.measurement systems application and design[M].北京:机械工业出版社,2005.
[7]徐科军.传感器与检测技术[M].2版.北京:电子工业出版社,2008.
[8]刘乐善.微型计算机接口技术及应用[M].武汉:华中科技大学出版社,2000.
猜你喜欢
诗歌月刊(2023年1期)2023-03-22
现代食品科技(2022年8期)2022-09-02
中学生数理化·高一版(2022年3期)2022-04-05
小天使·一年级语数英综合(2021年8期)2021-08-17
初中生学习指导·提升版(2020年10期)2020-09-10
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
中国医疗美容(2015年1期)2015-07-12
少年科学(2015年6期)2015-07-01
