
基于DSP的直流电动机励磁系统设计
2013-06-08 06:23罗潇韦春健
船电技术 2013年6期
罗潇,韦春健
(海军驻桂林地区军事代表室,桂林 541002)
0 引言
目前采用的励磁装置多为开环控制,稳定性差,元器件老化,响应速度慢,电能损耗大,维护麻烦,整个励磁系统效率低。随着电力电子技术的发展,励磁调节器开始采用一些新的器件。以DSP为核心控制器的新型励磁调节器,可使系统的集成度、响应速度和可靠性都大大提高。通过软件实现励磁调节器的调节和限制功能,不仅取代了复杂的调节和限制电路,更扩充了许多模拟电路难以实现的功能,充分体现了新型励磁调节器的优越性。本文主要对直流电动机励磁调节系统PI参数的设计进行了着重分析,以求使系统达到更好的调节效率和运行稳定性,并以TMS320F2407A 芯片为核心设计了励磁调节器的整体软件结构。最后通过实验验证了本文设计的励磁调节器的实际可行性。
1 励磁调节系统PI参数设计
1.1 直流电机的动态数学模型
直流电机电枢回路等效电路[4]如图1所示,其中R为电枢回路总电阻;L为电枢回路总电感;Udo为交流电源经整流桥后输出的直流空载电压。

图1 直流电机电枢回路等效电路



其中Tm=GD2R/(375CeCm)为机电时间常数,含有Φ信息。
将三个方程对应的传递函数合并,可得到直流电机的动态结构如图2所示。
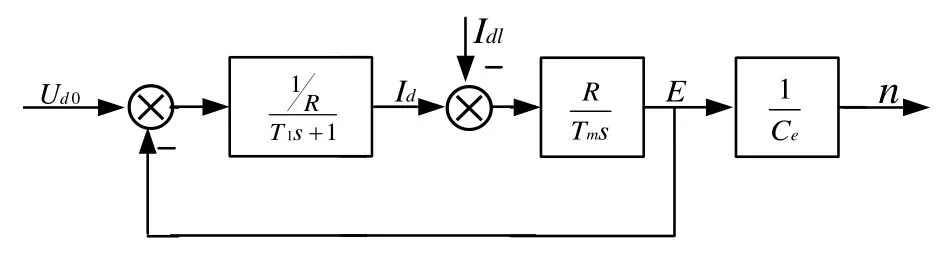
图2 直流电机动态结构图
1.2 弱磁调节器PI参数设计
为了获得闭环运动控制系统的优良动态性能,必须使用调节器将系统改造成标准典型的系统。一般最常用的是PI调节串联校正装置。连续系统的PI调节器设计有一套成熟、实用的工程设计方法。对于数字控制系统,按连续系统设计出来的PI参数只需离散化处理即可,图3为最基本的调速框图。

图3 最基本调速框图
本文中的直流电动机采用弱磁调速,因此当磁通为变量时,参数Ce=KeΦ、Cm=KmΦ就不再是常数。为了分析问题方便应使Φ在反电动势方程和电磁转矩方程中凸现出来:Ed=KeΦn、Te=KΦId。可见,随着Φ的变化,Ed、Te也随着变化。为了分析与设计方便,本文中将弱磁调速系统进行简化处理,同时不考虑涡流及磁化曲线非线性的影响。在实际的直流电机调速过程中,是当电动机的速度达到某一转速时,才进行弱磁调速,也就是一个微调的过程。 当转速在小范围内变动时,可以通过小范围内调节磁通,使电动机的转速达到稳定的目的,因此可认为CeΦn只是在小范围内调整,最终可得出电枢电流Id近似为常值。因此我们可以得到简化了的弱磁状态下双闭环调速系统结构框图[5]如图4所示。

图4 直流电动机弱磁调速系统结构框图

图5 转速环等效结构图
为了将反馈环节移到前向通道内,形成单位反馈。在给定通道上也加一滤波环节(1:1),其实Ton很小。转速环的结构框图等效图如图5所示。
转速环校正成典型II型系统,采用PI调节器。这样,调速系统的开环传递函数:

式中各参数的含义如下:
α:转速反馈系数;
Tfn:转速反馈滤波时间常数;
Ks:表示的是开关管放大系数;
Kf:电动机励磁回路电阻的倒数,即1/Rf;
Tf:励磁回路时间常数,即Lf/Rf;
KΦ:由磁化特性曲线确定;
GD2:电动机轴上的飞轮转动质量;
Km:转矩常数;
Id:电枢电流。
因此:
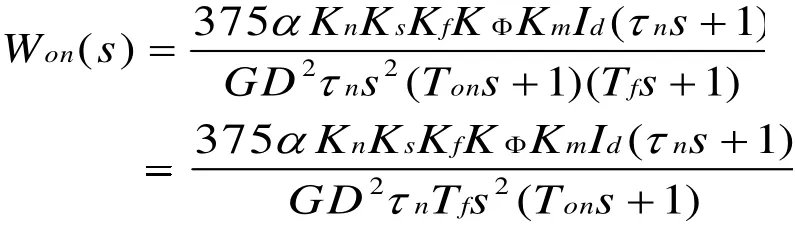
校正成典型II型系统的动态结构图如图6所示

图6 按典型II型校正后的动态结构图
转速环PI调节器参数的选择
按Mpmin准则及典型II型系统关系式得
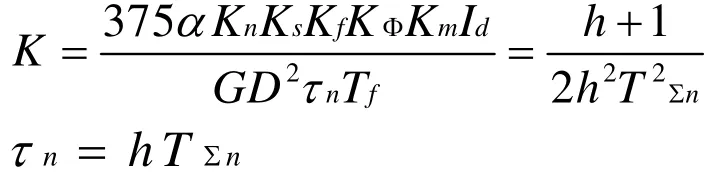
则调节器参数为

取“工程最佳”参数时,h=5,得相应的参数值。
2 励磁调节器的总体设计
2.1 励磁调节器的硬件设计
本文中的励磁控制主要是针对主励磁系统为绝缘栅型场效应管(MOSFET 管)励磁系统而设计的,系统的整体结构如图7所示。
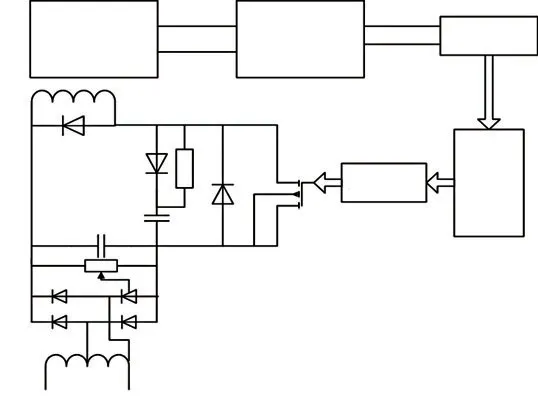
图7 系统整体结构图
直流电动机的励磁电压由市电经自耦调压器后,经过整流桥给电动机励磁绕组提供。电动机的速度反馈由一台与直流电动机串接的单相同步发电机的端电压间接反映。发电机端电压经检测电路后,反馈至DSP的AD转换模块。DSP对反馈值进行PI调节后,发出占空比可调的PWM脉冲波,经过光耦隔离电路的电气隔离后,控制与励磁绕组串联的MOSFET管的关断时间,励磁绕组中的电流相应地发生变化,从而改变直流电动机的转速输出,达到实时调节的目的。
2.2 励磁调节器的软件设计
DSP以其片内外设丰富、数据处理能力强等特点,在数字信号处理领域得到了广泛应用。本文中励磁系统的软件结构主要就是以TMS320 F2407A芯片为核心进行设计的。控制系统主程序结构如图8所示。
程序首先进行系统初始化,其中包括ADC模块和PWM模块的初始化。DSP的AD转换由EVA模块的定时器1的周期下溢中断启动,AD模块进行ADnumber次转换后取平均值,作为PI调节的初值加载到PI调节程序中[6]。PI调节程序运算结束后,将调节后数值加载至EVB模块的定时器3的比较寄存器CMPR3中[6],并通过PWM模块产生脉宽波形控制开关管的通断,以改变直流电动机的转速,从而完成一次完整的调节过程。
3 实验与结论
根据本文励磁调节器的设计,调试好系统的硬件、软件设备,给同步发电机加以固定励磁。分别进行电动机启动、加载、卸载实验,得到发电机端3组电压频率波形如图9 ~图11所示。

图8 主程序流程图
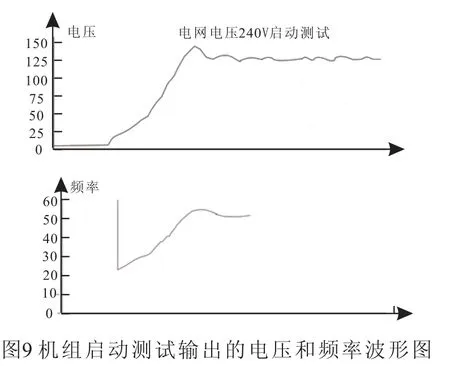
从实验结果可以看出,本文设计的励磁调节器在机组启动、加载以及卸载时都能够根据实时的工作情况对直流电动机转速进行有效、迅速的调节,保证了发电机端稳定的输出,达到了预期的效果。
4 结束语
本文设计的以DSP为核心的直流电动机斩波励磁调节系统,利用DSP快速、高效的数据处理能力,并通过对实际系统进行适当的PI调节参数设置,对直流电动机转速进行闭环励磁控制,从而得到稳定的转速输出。相对于采用模拟电路控制的传统励磁调节系统,本文设计的励磁调节器在提高系统稳定性与调节效率的同时,由于DSP的引入,更简化了系统的电路复杂程度,大大减轻了模拟电路容易产生温漂而使电源的频率和电压发生偏移的问题,具有很高的应用价值。

[1] 王兆安, 黄俊.电力电子技术.北京: 机械工业出版社, 2000.
[2] 孙宝元, 杨宝清.传感器及其应用手册.北京: 机械工业出版社, 2004.
[3] 麦崇.电机学与拖动基础.广州: 华南理工大学出版社, 2006.
[4] 陈伯时.电力拖动自动控制系统.北京: 机械工业出版社, 1997.
[5] 刘和平, 严利平.TMS320LF240X DSP结构、原理及应用. 北京: 北京航空航天大学出版社, 2002.
[6] Texas Instruments.TMS320c/F24X DSP peripherals reference guide.Texas Instruments, 2003.
[7] David M Alter. Using PWM Output as a Digital-to-Analog Converter on a TMS320C240 DSP. Texas Instruments. November 1998.
[8] TMS320LF240x/240xA Event Manager(EV)Reference Guide(Rev.C). Texas Instuments. 2004.
[9] L.M.Hajagos,G.R.Berube. Utility Experience with digital excitation systems. IEEE Transactions on Power Systems,February,1998,Vol.13,No.1: 165-170.
猜你喜欢
大电机技术(2022年5期)2022-11-17
火力与指挥控制(2022年5期)2022-07-25
弹箭与制导学报(2020年1期)2020-07-09
弹箭与制导学报(2019年6期)2019-06-24
电子制作(2017年1期)2017-05-17
电源技术(2015年9期)2015-06-05
电测与仪表(2015年20期)2015-04-09
电测与仪表(2015年3期)2015-04-09
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01
