
Trimble全站仪在动态测磁工程中的应用
2013-06-08 06:24:40李金禄张连嵩郑永良喻洲
船电技术 2013年6期
李金禄 ,张连嵩,郑永良,喻洲
(1.92330部队,青岛 邮编266102;2.海军工程大学电气与信息工程学院,武汉 430033)
1 引言
动态测磁是指舰船与磁传感器阵列相对运动的情况下测量磁场。与传统的静态测磁相比,它能够全方位地测量舰船磁场,检测效率更高[1-2]。动态磁性检测站能够在舰船经过测量区域时自动采集舰船磁场,同时为获取测量点相对于舰船中心的位置信息,需要对舰船的运动轨迹进行实时定位。定位系统主要包括两种,一种是GPS定位[3], 另一种是全站仪定位[4]。它有着GPS定位机不具备的一些优点,如不需要卫星信号,可以在比较封闭的环境下测量,价格相对较低,观测数据直观,数据处理简单,操作方便等。因为在某些磁性检测站中GPS定位系统无法接受到卫星信号,因此采用全站仪定位系统。全站仪,即全站型电子速测仪(Electronic Total Station),是集水平角、垂直角、距离(斜距、平距)、高差测量功能于一体的测绘仪器系统,是动态测磁工作站不可或缺的一部分。先将全站仪安装在检测站的某一固定位置,在舰船上安装目标棱镜。当舰船缓慢地通过磁场传感器区域时,全站仪记录舰船运动轨迹,再利用坐标转换,推算出舰船相对于传感器的位置,实现舰船磁场的动态测量。
2 全站仪定位原理
动态检测站采用美国Trimble(天宝)公司的5600系列全站仪(见图1),该类产品造型精巧,性能比较稳定,精度高,操作简单方便,电子化、智能化程度较高,能够满足现场测量的要求,而且能够适应恶劣的工作环境,耐极端温度。但由于天宝产品有配套的应用软件,其通信指令有限对外公布,不允许用户自行开发软件,因此用户难以根据自己需求扩展其功能。

全站仪能自动地测量角度和距离,并能按一定程序和格式将测量数据传送给相应的数据采集器。全站仪自动化程度高,功能多,精度好,通过配置适当的接口,可使野外采集的测量数据直接进入计算机进行数据处理或进入自动化绘图系统。与传统的方法相比,省去了大量的中间人工操作环节,使劳动效率和经济效益明显提高,同时也避免了人工操作,记录等过程中差错率较高的缺陷。当光波从起点出发经棱镜反射回到起点时,会因往返时间差引起相位差。一般全站仪就是利用测相电路直接测定相位差来测算距离SD。全站仪还可以直接测出目标点的水平角HA垂直角VA和高程DHT,从而测得的数据是一组完整的三维球体坐标,通过坐标变换还可以转化为直角坐标系下坐标,参考图2(a)。图2(b)中的IH为主机仪器高,SH为棱镜高,HD为水平距离。为了保证测量的精度,在进行测量数据处理时需要考虑全站仪和棱镜的仪器高度,测量点的实际高程为[5]:

3 坐标变换
本定位系统采用天宝系列TS5600全站仪进行舰船定位。该全站仪具备自动跟踪功能,在手动锁定目标棱镜(临时安装在舰船上的3600反光棱镜)后,能自动跟踪并锁定运动的舰船,通过相关软件就可以采集、输出、处理其坐标信息。
第一次进行定位测量时,为了测得在一个坐标系下的绝对坐标,必须确定一个正确的方位,从而可以确定以全站仪为原点的相对坐标系,即建站。全站仪以主机为坐标原点,以选定的参考棱镜为后视点,该定位仪方位与后视点的连线水平方向为全站仪坐标的北方向,即Nx方向,如图3所示。

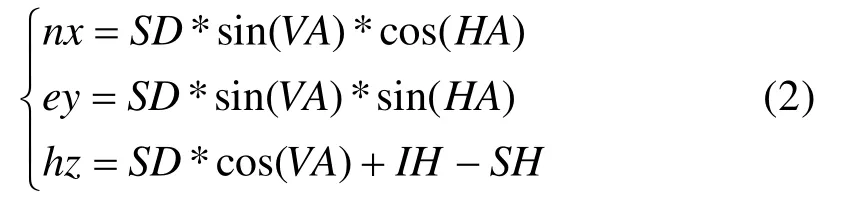
首先将全站仪测得的是球面坐标转换为直角坐标(nx,ey,hz)。
根据图3,测得的舰船位置信息是全站仪坐标系下的相对坐标,为了确定磁传感器和舰船的相对位置,我们需要的是舰船在整个测磁区域坐标系下的绝对坐标,因此需要进行坐标变换。
依据图4中的坐标变换示意图(a),当Nx方向与绝对坐标系下的Y轴不平行时,涉及到坐标的旋转,因此在选择全站仪后视点时应尽量与Y方向一致。当因场地条件限制难以实现时,可以设置水平偏置角。假设全站仪测得目标的坐标为(nx,ey,hz),全站仪在绝对坐标系下的坐标为(x0,y0,z0),如图4(b),即x0=△X,y0=△Y,z0=△Z,那么目标在绝对坐标系下的坐标为:


上述坐标变换可以用计算机程序实现,运行时无需操作,利用参考点或样点坐标验证坐标转换是否正确。注意到舰船在测磁区域主要进行的是X轴方向运动,因此可以考虑只测量舰船与全站仪的水平距离HD,这样可以将三维球体坐标简化为平面直角坐标,定位更加简洁方便。再根据全站仪和磁传感器在绝对坐标系下的位置,实时确定测量点与舰船的相对位置。但是这就要求舰船沿直线航行,否则会造成较大误差。
4 数据通讯技术
在建立一个自动监测系统时,一个关键技术就是如何用计算机远程控制全站仪的操作以及如何从全站仪中取得观测数据,即计算机和全站仪的数据通讯技术。由于从全站仪的键盘建站和输入点坐标较为麻烦,所以通过计算机来采集、处理数据可以大大提高测量速度和后期处理速度,减少失误概率,保证实时性。目前全站仪都是通过串口同计算机进行数据通信,本文应用Visual Basic语言设计程序,采用MSComm控件编写通信程序。通过该控件可完成计算机向全站仪发出指令和接受全站仪的状态和测量结果信号[5-7]。MSComm控件是利用串行通讯端口的属性来实现硬件控制的,它有很多属性,程序中涉及的主要有以几个[6-8]:
Commport:设置串行端口号,类型为Short,一般设置为1,即使用COM1端口。Settings:设置串行口通讯参数,包括通讯的比特率、奇偶校验、数据长度和停止位等。天宝全站仪的通讯参数为“9600,N,8,1”,表示串口比特率是9600bit/s,不作奇偶校验,8位数据位,1个停止位。Portopen:设置串口状态,值为True时打开串口,值为False时关闭串口。Input:返还并删除接受缓冲区中数据流。Output:向传输缓冲区写一个字符串。InBufferCount:返回接受缓冲区中等待的字符数。Inputlength:返回或设置接收缓冲区内用。Input命令写入的字节个数,取0值时表示Input命令写入整个缓冲区的内容。
天宝全站仪采用的是Geo/L语言。Geo/L语言是为了在Geodimeter CU系统各设备间进行通讯而发展起来的一门语言,基本的数据结构是数据由标号标定,即:
在此基础上加上命令和变量以使数据有来源去向,命令为:
[(LF)]
所有的指令以回车换行结束,当所有指令执行完以后总是送出
测量方式设置: PG,3=
读数:RG[
其中变元arg为测量方式,0表示标准测量STD方式,1表示跟踪测量TRK方式,2表示算术平均值D—bar方式。读数指令就是从全站仪的控制单元读取测量数据或者指定标记的数据。arg指输出方式,省略或为S时表示标准输出,为N时表示带名称输出,为D时是数据输出,为T时返回测试信号,有信号为301,无信号为300。其它命令还有很多,例如:
PV,20 :打开补偿器;PV,21:关闭全站仪。
动态检测站需要实时连续地测量数据,因此程序采用Timer时钟控件来实现测量事件的定时发生。天宝全站仪在跟踪测量模式下最快测量时间是0.4 s,因此时钟控件的Interval属性设为400,即每400 ms内读取一个测量数据。考虑到实用性,还设计了错误检查程序,当测量模式发生改变或出现通信线路故障、电源故障时,及时提醒用户。
为了更好的实现数据通信和交流电源供电,需要设计一套由供电模块和数据转换模块组成的集成装置。测磁站所使用的天宝全站仪都是由充电电池提供的12 V/ 4 A直流电源,充电耗时长,不耐用且易坏。设计的供电装置主要由变压器、整流器和保护电路组成。它接入电源为220 V的AC,整流变压后提供全站仪和数据转换模块所需电源。

全站仪还提供RS232C串行通信接口,数据线和电源线集成到一个接口上,如图5所示。根据RS232C标准,各装置之间线缆长度不应超过15 m,传送距离不够远,难以满足工业控制的要求,需要将数据转换为RS422A/RS485模式[9]。串行通信数据转换模块主要由ADAM模块构成。当计算机向全站仪发出指令时,该控制命令由ADAM模块将RS232串行通信数据变为RS422通信数据,再将数据转换回RS232格式传送给全站仪。全站仪收到命令后,对某一已知距离进行测量,并将数据通过ADAM模块转换后传给计算机,实现长距离通讯。
5 结束语
动态检测站是舰船磁场测量的主要发展方向之一,通过定位系统和测磁系统就可以准确、快速地对舰船进行磁性定位和测量,因此对全站仪的应用研究显得尤为重要。全站仪作为定位系统的主要设备,其操作简单,测量方便、准确,时效性好,在测磁站中得到广泛应用。通过全站仪动态获取舰船在测磁区的位置,经过坐标转换推算出磁场传感器相对于舰船的位置信息。这样就可以很方便对舰艇进行磁性分析,以判断是否需要对其进行消磁处理。用软件实现计算机与全站仪的数据通讯,便于消磁工作者实时控制定位系统和测量数据处理,极大地提高了动态测磁的工作效率。
[1] 隗燕琳. 舰船近场动态磁场测量中的磁性定位方法研究[D]. 武汉: 海军工程大学, 2009.
[2] 刘大明.舰船磁场测量[M]. 武汉: 海军工程大学,1993.
[3] 谢愉, 杨培霞. 船用GPS技术应用研究[J]. 航空电子技术, 1995, (1): 20-25.
[4] 黄振杰, 张远智. 全站仪发展的现状及前景[J].北京测绘, 1997, (2): 31-33.
[5] 韩志国. 计算机和全站仪数据通讯技术探讨[J].软件导刊, 2008, 7(3): 157-159.
[6] 付海波, 曹红杰. VB环境下计算机与全站仪的数据通讯方法[J]. 北京测绘, 2000, (4): 29-31.
[7] 刘兴权, 梁艳平, 肖红. 计算机和全站仪通讯的关键技术[J]. 四川测绘, 1999, 23(3): 121-122.
[8] Geodimeter CU User Guide Part 1[M/OL].http://www.trimble.com,2005-06.
[9] 潘新民, 王燕芳. 微型计算机控制技术实用教程[M].北京: 电子工业出版社, 2008: 145-153.
猜你喜欢
汽车实用技术(2022年16期)2022-08-31 07:02:58
北京测绘(2020年12期)2020-12-29 01:37:18
装备制造技术(2020年12期)2020-05-22 09:25:14
工程与建设(2019年3期)2019-10-10 01:40:18
电测与仪表(2016年9期)2016-04-12 00:29:52
黑龙江科学(2016年15期)2016-03-15 21:04:13
船舶标准化工程师(2015年5期)2015-12-03 11:00:29
中国交通信息化(2014年7期)2014-06-05 03:18:40
中国交通信息化(2014年5期)2014-06-05 03:09:16
电测与仪表(2014年23期)2014-04-04 12:08:20
