
船用导航设备信息交互技术分析
2013-06-08 06:22林育生吴永明张宁
船电技术 2013年6期
林育生,吴永明,张宁
(1.海军九0二厂,上海 200083;2.海军驻上海地区舰艇设计研究军代室,上海 200011)
0 引言
船用导航设备为船舶系统提供航向、航速、航程、航迹、位置、水平姿态、水深、气象要素等导航信息。这些信息不仅对于航行安全非常重要,而且也是武器系统正常工作、提高命中精度必须考虑的要素之一。现代舰船系统强调系统集成,以发挥系统的整体效能,船用导航单机设备是舰船综合导航系统(INS-Integrated Navigation System)的基础设备和导航信息来源,系统内设备之间、与舰船其它系统之间信息数据的交互与共享十分密切,因此,研究分析导航设备信息交互技术对于船舶系统信息化建设以及提升舰船系统整体效能具有重要意义。
1 信息交互内容
1.1 导航信息的种类和作用
船用航海导航设备主要包括平台罗经、惯导、电罗经、电控罗经、磁罗经、计程仪、测深仪、航迹仪、电子航海图、综导显控台、导航雷达、GPS、罗兰C、北斗接收机、船舶气象仪、气象传真机、卫星云图接收机、自动操舵仪、Navtex和AIS等设备。导航信息可以概括为四大类信息:一是船舶航行信息,如航速、航程、航迹等信息;二是船舶位置信息,如所在海域的经纬度等信息;三是船舶姿态信息,如航向角、纵摇角、横摇角度等信息;四是所在海域环境信息,如电子海图、水深、海水流速、流向、风速、风向、大气压力、温度、湿度、气象云图、能见度、航行告警等信息。这些信息是基础信息,应用于船舶导航、舰位推算、自动驾驶、武器系统等场合。
1.2 导航信息的来源
导航信息主要来源如下:
1) 平台罗经、惯导提供船舶航向和水平姿态角(纵横摇角)信息,包括1°/r 、10°/r、 360°/r航向模拟信号、60 Hz或400 Hz 180°/r纵摇角、60 Hz或400 Hz 180°/r横摇角模拟信号,以及航向角、纵摇角、横摇角数字信号。平台罗经、惯导也可以推算舰位;
2) 电罗经、电控罗经提供航向信号,包括:50 Hz或400 Hz 1°/r航向模拟信号;400Hz 10°/r航向模拟信号;400 Hz 36°/r航向模拟信号;400Hz 360°/r航向模拟信号;同步航向信号1/360°,激磁电压110V 50Hz;NMEA 0183格式航向数字信号;
3) 复示磁罗经提供航向数字和模拟信号;
4) 计程仪提供船舶航速和航程信息。根据国家标准,电磁计程仪输出信息的主要形式有:a)航速模拟量:转值为55 kn/r、240 kn/r;b)航速数字量;C)航程脉冲量:200脉冲/海里、400脉冲/海里、2000脉冲/海里[1];
5) 测深仪提供水深数据,一般以NMEA 0183格式或者自定义格式数字信号发送;
6) 船舶气象仪提供风速、风向、温度、湿度和大气压力等气象要素数字信息;
7) GPS接收机提供NMEA 0183格式的经纬度、航迹向、地速和时间等信息。GPS也可以计算出航向、航速值,一般作为备用或参考;
8) 罗兰C、北斗接收机提供NMEA 0183格式的经纬度数据;
9)综导显控台收集系统内各导航设备的数据,分析处理并重新组织打包,向外系统(如作战系统)或其它设备提供综合的导航信息。
1.3 NMEA 0183数据格式
船舶导航设备数字信号传输常用NMEA 0183格式,该协议是美国国家海洋电子协会(National Marine Electronics Association)为海用电子设备之间通信而制定的标准格式,已经成为RTCM标准协议。该协议定义了在波特率为4800bps的串口数据总线上传输的电器信号需求、数据传输协议和时间,以及句型格式[2]。
NMEA0183的数据发送以“句子”为单位,语句格式为:$aaccc,ddd,ddd,…,ddd*hh
常用导航设备标志为:陀螺罗经HE,电磁计程仪VW,多普勒计程仪VD,测深仪SD,GPS GP,罗兰C LC,气象仪WI等。
2 信号传输方式
导航设备信号传输分为模拟信号和数字信号两大类。模拟信号传输方式包括自整角机、旋转变压器、步进电机、各种模拟传感器等。随着计算机技术的发展,导航装备与外系统通信更多采用数字信号,传输途径包括串行、并行、脉冲信号和网络通信等方式,主要有 RS-232C、RS-422A、RS-485、CAN总线、以太网、MIL-STD-1553B总线、SDH网络、SPI总线和非标接口等方式。
2.1 自整角机
自整角机在舰船导航系统中常用于航向、纵横摇角度和航速转角量(55节/转)信号的传输。自整角机是利用自整步特性将转角变为交流电压或由转角变为转角的感应式微型电机,在伺服系统中被用作测量角度的位移传感器。实际应用中,两台或多台电机通过电路的联系,使机械上互不相连的两根或多根转轴自动地保持相同的转角变化或同步旋转,从而实现角度信号的远距离传输、变换、接收和指示(如图1所示)。有些应用场合需要将自整角机的信号与数字信号互相转换,可以采用国外的SDC/RDC1700系列芯片,或国内的ZSZ、SZZ系列芯片。其应用已经比较成熟,既有自整角机信号转换为数字信号的应用实例[3],也有数字信号转换为自整角机信号的应用实例[4][5],这里不再介绍。

图1 力矩式自整角机工作原理图
2.2 RS-422A
RS-422全称是“平衡电压数字接口电路的电气特性”,是EIA(Electronic Industry Association)为弥补RS-232C通信距离短、速率低的不足而制定的串行数据接口标准。RS-422是一种平衡通信接口,支持点对多的双向通信,传输速率可达10 Mb/s,最大传输距离1219 m。它采用差分传输方式,使用一对双绞线,将其中一线定义为A,另一线定义为B(如图2),RS-422A对逻辑电平的定义是根据两条传输线之间的电位差值来决定的,通常情况下,发送驱动器A、B之间的电压差为+2~+6V时表示逻辑“1”、为-2~-6V时表示逻辑“0”。在接收端,当A线的电平比B线的电平高200 mV时表示逻辑“1”、低200 mV时表示逻辑“0”。RS-422A电路目前常用MC3487和MC3486芯片。
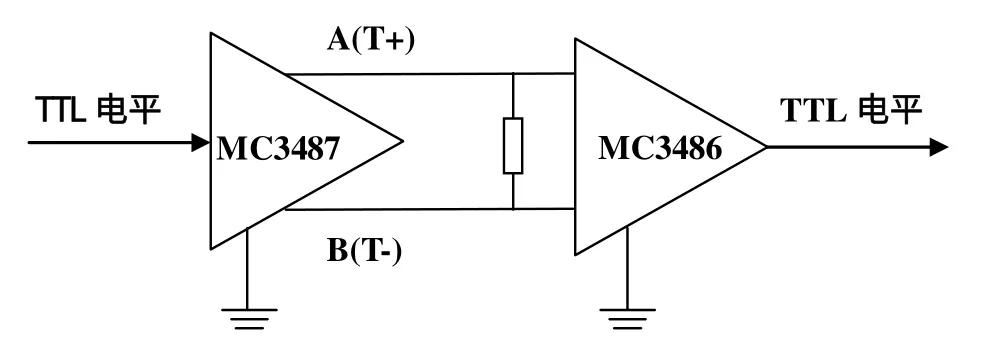
图2 RS-422A标准传输线连接
2.3 CAN总线
CAN(Controller Area Network)总线是二十世纪八十年代开始发展起来的现场总线,1993年公布了CAN总线的ISO11898标准。它是一种多主方式的串行通讯总线,基本设计规范要求有高的位速率、高抗电磁干扰性,而且能够检测出总线的任何错误,有效支持分布式控制或实时控制,是当今自动化领域技术发展的热点之一。
CAN总线上传输的信息称作报文,报文以特定组织形式的帧传输。帧有两种不同的标示符格式:含有11位标识符的标准帧和含有29位标识符的扩展帧。CAN2.0A版本使用标准帧,CAN2.0B版本可使用标准帧和扩展帧。报文有4种类型的帧:数据帧、远程帧、错误帧和过载帧。数据帧由帧起始(SOF)、仲裁域、控制域、数据域、CRC域、应答域和帧结尾(EFO)组成,数据域的长度为0-8个字节,每个字节包含8个数据位,按照先MSB 后LSB的顺序发送。
CAN总线控制器产品既有独立的芯片如Philips公司SJA1000、Bosch的CC750、Intel的AN82527/AS82527,又有集成到微控制器MCU中的芯片如Philips公司的P8XC59X、Motorola的68HC912和MC6837X等。CAN总线收发器芯片有PCA82C250[6]/251和TJA1050、Bosch的CF151和CDF160、TI的SN65HVD2等。
3 导航信息交互格式分析
3.1 航向
航向是指舰艇艏向角,舰艏艉线在水平面的投影与真北的夹角,从真北起顺时针0°~360°。
1)航向模拟信号。模拟信号种类包括1°/r航向模拟信号、10°/r航向模拟信号、360°/r航向模拟信号、同步航向信号1/360°,110V 50Hz激磁,通过自整角机发送/多极旋转变压器发送/固态发送(通过数字-自整角机/旋转变压器转换器输出三相自整角机模拟信号或正余弦变压器信号);
2)航向数字信号。通过EIA RS-422A串行接口发送。传输速率:4800bps;数据格式:NMEA 0183;数据更新速率:2次/秒;数据编码:ASCⅡ码,起始位1bit,数据位8bit、无校验位、停止位1bit(后面文中使用RS-422A接口除非单独指出的参数,其它参数相同)。
报文内容:
$HEHDT,xxx.xxx,T*hh
3)CAN总线接航向数据传输。有些平台罗经、电罗经提供CAN总线接口发送航向数据,具体参数为:CAN2.0B总线,设备ID为0x01(平台罗经),波特率为250kbps,数据帧的格式及内容定义见表1。

表1 航向数据帧的格式及内容定义
3.2 航速/航程
1)航速模拟信号。一种方式是采用自整角机传输,55节/转(或240Kn/r),自整角机输出角度所代表的就是航速值;另一种方式是固态发送,计程仪航速信号经过数字-自整角机转换器,输出三线三相自整角机信号,或者经过数字-旋转变压器转换器,输出两相正、余弦变压器信号。
2)航速WCV语句。有些计程仪提供数字信号发送接口[7],广播式发送,采用RS-422A接口,数据更新1次/秒,报文内容为:
$VMWCV,vv.vv,s*hh
3)CAN总线航速数据传输。总线接口模式:PeliCAN,CAN2.0B;设备ID:0x03;波特率:125kbps。报文编号为0x10,数据域1-2字节为速度值,更新频率为1次/秒。
4)航程脉冲信号。每海里输出200个脉冲(或者400脉冲/海里、2000脉冲/海里),为TTL电平、占空比为1:1的方波信号。
3.3 位置
船舶位置信息一般由GPS/GLONASS、北斗接收机接收卫星信号或罗兰C接收台链的信号计算而得,常用数据格式包括POS、GLL等。下面简单介绍GLL语句:
$LCGLL,ddmm.mmm,a,dddmm.mmm,b,A*hh
3.4 水平姿态角(纵横摇角)
纵摇角、横摇角分别是指绕舰船横轴、纵轴转动的角度。该信息一般由平台罗经、惯导提供。对外传输方式为:通过固态发送/自整角机发送60 Hz或400 Hz 180°/r纵摇角、横摇角模拟信号;通过RS-422A发送数字信号,数据格式为二进制补码,横摇角数据为两个字节,最高权位b10,权值22.5°,范围±45°(<0.02°),b15为符号位(0为正、1为负),纵摇角数据为两个字节,最高权位b10,权值11.25°,范围±20°(<0.01°),b15为符号位(0为正、1为负);通过CAN总线传输,设备ID为0x01,波特率为250kbps,报文编号为0x02,数据域1-4字节为纵摇角、5-8字节为横摇角,更新频率为40次/秒。
3.5 水深
1)RS-422A接口传输。水深信息采用广播式发送,1次/秒,报文内容如下[8]:
$SDDPT, xxxxx.x*hh
2)CAN总线接口传输。设备ID为0×40,波特率为250kbps或125kbps,报文编号为0x80,数据域1-2字节为水深值,更新频率为1次/秒。
3.6 气象数据
常见数据发送格式既有NMEA 0183 格式MWV、WSD、THP等语句,又有设备自定义格式。这里简单介绍MWV语句:
$WIMWV,xxx.x,R,yy.y,M,A*hh
4 结束语
导航信息是舰船的基础性信息。本文从导航信息的种类、作用、来源、交互方式、内容、格式、接口协议等方面对现有导航设备信息交互技术分别进行了阐述和分析。随着科学技术的发展,信息化是舰船系统发展方向,导航设备正朝一体化、信息化、网络化、智能化方面发展,导航信息的准确性、实时性、标准化等要求进一步提高,其信息交互及共享将更加标准化、网络化、规范化,可靠性、实用性增强,在舰船系统中发挥更大的作用。
[1] 中国国家标准化管理委员会. GB/T 4301-2008船用电磁计程仪[S]. 北京: 中国标准出版社, 2008
[2] 钱德俊, 张哲, 胡晨等. NMEA0183协议解析[J]. 电子器件, 2007, 30(2): 698-701.
[3] 赵波, 高飞, 王公浩等. 数字式航向角指示器的设计[J]. 现代电子技术, 2005, 28(13): 67-69, 73.
[4] 高敬东, 陈浩, 孙振宇. JD-5WA计程仪原理与使用维修[M]. 武汉: 海军工程大学, 2011: 107-109.
[5] 张敏.数字-自整角机转换器的研究[J]. 江苏电器,2008, (7):18-19,37.
[6] 周伟, 程晓红. CAN与RS232转换节点的设计与实现[J]. 计算机工程, 2008, 34(19): 256-257,268.
[7] 陈锦德.计程仪[M].天津: 海军司令部航海保证部,2008: 159-160.
[8] 陈锦德. 测深仪 无线气象传真接收机 自动操舵仪船舶气象仪[M].天津:海军司令部航海保证部, 2008:53-54.
猜你喜欢
汽车实用技术(2022年7期)2022-04-20
船海工程(2021年1期)2021-03-02
时代农机(2020年3期)2020-12-23
中国船检(2020年10期)2020-11-07
电子技术与软件工程(2020年23期)2020-03-15
电子制作(2019年7期)2019-04-25
电子制作(2018年16期)2018-09-26
吉林大学学报(理学版)(2018年2期)2018-03-27
中国惯性技术学报(2017年1期)2017-06-09
中国惯性技术学报(2017年1期)2017-06-09
