
挖掘机器人铲斗目标图像的改进分水岭分割
2013-05-25 08:30王福斌王静波
中国工程机械学报 2013年4期
王福斌,张 磊,王静波
(1.河北联合大学 电气工程学院,河北 唐山 063009;2.河北联合大学 现代技术教育中心电教中心,河北 唐山 063009)
为实现挖掘机器人的自动挖掘,采用视觉伺服控制的方法对挖掘机铲斗末端运动轨迹进行规划控制.由于挖掘作业现场环境的复杂性,尤其是背景图像的复杂及光照条件的不理想,使得对铲斗目标图像的分割和识别有较大的困难.一般的基于阈值的图像分割方法很难准确地将铲斗目标分割出来,从而影响了后续的铲斗特征提取及识别工作,为此本文将分水岭图像分割方法引入到铲斗目标分割中.
考虑到一般的分水岭分割方法容易造成图像的过分割或欠分割现象,为此提出了改进的分水岭图像分割方法进行铲斗目标的分割,首先采用模糊C-均值(C为预定的类别数目)聚类分割方法对原始图像进行初步分割,然后采用标记提取的分水岭分割方法完成对铲斗目标图像的分割[1].
1 图像分割的模糊C-均值聚类算法
设给定图像数据集为X={x1,x2,…,xk,…,xn}∈R,其中xk为图像中各像素的灰度值.将图像X划分为c类,根据图像中像素及c个聚类中心的每一个中心的加权隶属度,对预定的目标函数进行迭代优化运算[2].
设V={v1,v2,…,vc}为数据集的c个聚类中心,dik=‖xk-vi‖为数据集中的某个元素xk与聚类中心vi间的距离.将元素与类进行模糊划分时,按照一定的隶属度将某个元素划分到某一类,第k个像素对第i类的隶属度可表示为uik,模糊隶属度矩阵U={uik}则用来表示分类结果.通过最小化隶属度矩阵U和聚类中心矩阵V组成的目标函数Jm(U,V),即可实现模糊C-均值聚类:

式中:Jm(U,V)为目标函数;(xk,vi)为第k个像素到第i类中心的距离;m≥1为模糊权重指数,m的经验取值为[1.5,2.5],一般取m=2.
模糊C均值聚类的实现过程就是通过迭代调整(U,V),使得目标函数为最小,具体计算步骤为:
(1)参数初始化.对于n个数据集的c个类(2≤c≤n),初始化迭代停止阈值ε>0,迭代计数器b=0及聚类中心V(0).
(2)计算隶属度矩阵.对于∀i,k,如果存在>0,则有

2 分水岭图像分割
分水岭变换起始于对图像的地形学理解,图像灰度值被解释为地标高度,可用于对图像进行灰度分割.分水岭分割方法有基于距离变换的分水岭分割、基于梯度的分水岭分割、控制标记符的分水岭分割等.
分水岭分割方法的思想是基于数学形态学理论,其变换过程也有若干种定义.VINCENT L提出的计算方法被认为是经典的计算过程,其主要步骤分为排序及淹没过程.排序主要是对每个像素的灰度级按增序排列,而淹没过程则从低到高渐次进行.经过分水岭变换后,淹没的区域之间的分界点以分水岭脊线形式出现,也代表输入图像的极大值点集.因此,分水岭变换时以原始图像的梯度图像作为输入图像.
图像f(x,y)在点(x,y)处的梯度可表示为对于数字图像,用差分代替导数后,得梯度近似表达式为

分水岭变换对噪声敏感,因此容易导致过分分割问题.为解决过分分割问题,目前提出了许多有效的办法,常用的有门限分水岭分割方法、基于区域合并的方法等.比较简单有效的方法可采用直接对梯度函数进行修改,对输入的梯度图像进行阈值处理,降低对微弱图像边缘的敏感性,即

式中:g(x,y)为输入的梯度图像;t为阈值.
在采用分水岭方法对梯度图进行分割前,为了防止过分分割,先将目标点标记出来.在局部区域中,若区域面积大于设定的阈值,即作为标记.以标记点为区域极小值进行分水岭分割[5-6].
3 分割仿真实验
图1为铲斗目标分水岭分割结果图像.分水岭方法可以将铲斗从复杂的背景环境中提取出来,图2为障碍物分水岭分割结果图像.通过分水岭方法可以将障碍物从复杂的光照背景中提取出来.
4 结语
针对挖掘机器人铲斗目标及障碍物目标分割的复杂性,本文采用模糊C-均值聚类分割方法,先对图像进行初次分割,在初步分割后的图像基础上得到梯度图像,最后进行分水岭分割.仿真实验表明,该分割效果优于传统的分水岭分割方法.
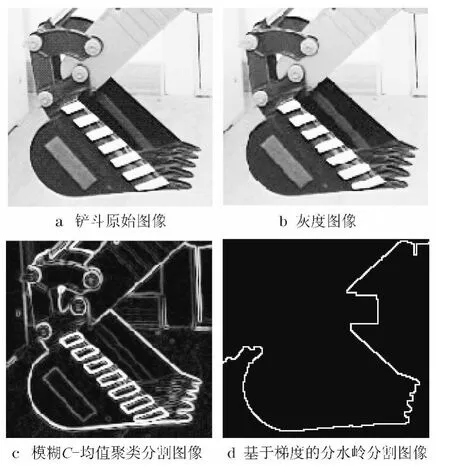
图1 铲斗目标分水岭分割结果Fig.1 Watershed segmentationresult of bucket
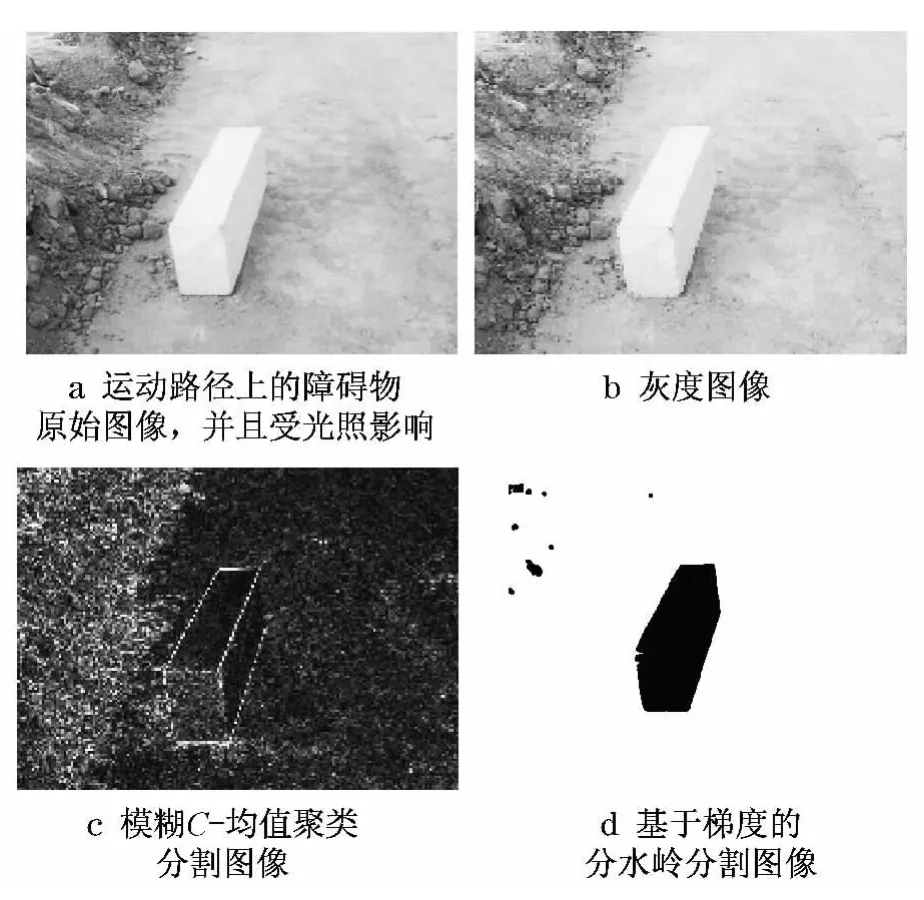
图2 障碍物分水岭分割结果Fig.2 Watershed segmentation result of barrier
[1]冷美萍,鲍苏苏,孟祥玺,等.一种改进的分水岭分割算法[J].贵州师范大学学报:自然科学版,2010,28(1):62-65.LENG Meiping,BAO Susu,MENG Xiangxi,et al.A method of improved watershed segmentation algorithm[J].Journal of Guizhou Normal University:Natural Sciences,2010,28(1):62-65.
[2]李云松,李明.基于灰度空间特征的模糊C-均值聚类图像分割[J].计算机工程与设计,2007,28(6):1358-1361.LI Yunsong,LI Ming.FuzzyC-means clustering based on gray and spatial feature for image segmentation[J].Computer Engineering and Design,2007,28(6):1358-1361.
[3]WUEST B,ZHANG Y.Region based segmentation of Quick bird multi spectral imagery band ration and fuzzy comparison[J].ISPRS Journal of Photogrammetry and Remote Sensing,2009(64):55-64.
[4]KANG J Y,MIN L,LUAN Q X,et al.Novel modified fuzzyC-means algorithm with applications [J].Digital Signal Processing,2009,19(2):309-319.
[5]曾荣周,伏云昌,童耀南.一种改进的分水岭分割的研究[J].光电子技术,2007,27(1):23-26.ZENG Rongzhou,FU Yunchang,TONG Yaonan.A method of improved watershed segmentation algorithm[J].Optoelectronic Technology,2007,27(1):23-26.
[6]朱俊良,王茂芝,郭科.基于形态预处理和标记提取的分水岭分割算法[J].信息技术,2010,9:17-20.ZHU Junliang,WANG Maozhi,GUO Ke.Watershed segmentation method based on morphological preprocessing and marker extraction[J].Information Technology,2010,9:17-20.
猜你喜欢
数学物理学报(2022年5期)2022-10-09
数学物理学报(2021年6期)2021-12-21
数学物理学报(2021年5期)2021-11-19
长江丛刊(2020年13期)2020-11-19
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
百姓生活(2017年5期)2017-05-15
计算技术与自动化(2015年2期)2015-09-09
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
