基于PMM8713的标准转速装置研制*
2013-05-14 03:18周敏
计量技术 2013年8期
周 敏
(江苏省镇江市计量所,镇江 212009)
0 引言
标准转速装置是用来对转速表进行检定的装置,由于目前使用的标准转速装置比较笨重,准确度较低,且到企业现场检定不方便等原因,我们采用单片机和PMM8713设计出标准转速装置。它由信号源、信号调理电路、电机及驱动电路、齿轮箱等组成。由于步进电机的旋转是以固定的角度(步距角)一步一步运行的,没有累计误差,所以用于本设计比较合适。
1 系统总体设计
利用单片机AT89S52定时器产生方波信号作为信号源,经信号调理电路处理后产生符合步进电机时序要求的信号序列,送至电机驱动电路,驱动步进电机,带动齿轮装置输出。系统总体设计框图如图1所示。

图1 系统总体设计框图
2 信号源及显示启停设计
采用MCS-51单片机(AT89S52)作为控制器,利用它的定时器中断产生方波信号作为信号源,利用它的I/O口控制液晶显示器及启停开关。
3 信号调理电路设计
由于步进电机的特点及其控制驱动的要求,步进电机与其他控制电机最大区别在于,步进电机是通过输入脉冲信号来进行控制,每输入一个脉冲信号,电机就转动一个固定角度,电机的转动总角度由输入脉冲数目决定,电机的转速由输入脉冲的频率决定。步进电机不同于其他交流电机还在于:仅仅接上电源,电机并不转动,还必须接上相应的脉冲分配驱动器,驱动器的输出为步进电机各相提供带有通电顺序的励磁电流。所以,步进电机的工作性能,在很大程度上取决于所使用驱动电路的性能指标。
PMM8713是由日本Sanyo(三洋)电机公司生产的步进电机控制用脉冲分配驱动器(又称逻辑转换器),为双列直插式16脚单片CMOS集成芯片。PMM8713既可以用于3相控制,又可以用于4相控制。此外,PMM8713还具有单时钟或双时钟工作方式,带有正反转控制功能以及初始化复位功能,其内部有时钟选通、激励方式控制、可逆环形计数、激励方式判断等电路。因为PMM8713所有输入端均采用施密特整形电路,因此抗干扰能力强。PMM8713外围电路(3相控制)如图2所示。
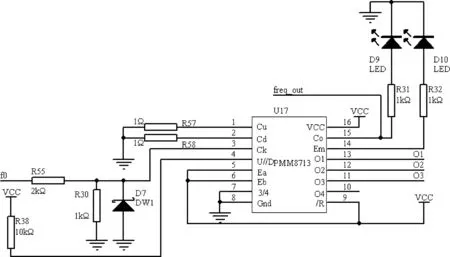
图2 PMM8713外围电路
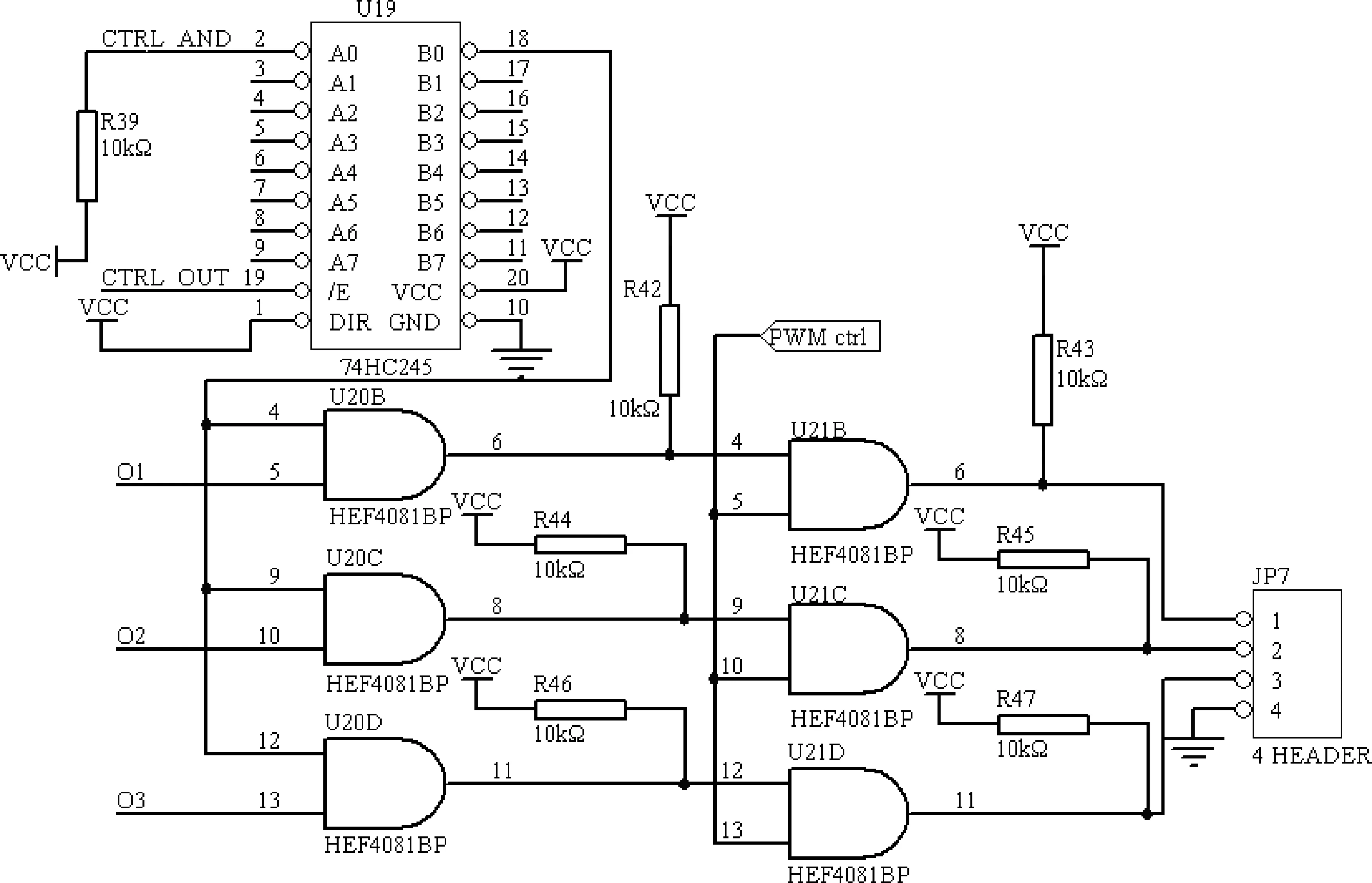
图3 PMM8713输出控制电路
图2中,f0是由AT89S52产生的方波信号,接到PMM8713芯片的时钟端(3号引脚),该信号经PMM8713处理后,在O1、O2、O3脚输出符合步进电机时序要求的信号。图中电阻R30和稳压管D7为保护电路,防止输入的方波信号电压过大损坏PMM8713芯片。
PMM8713上电后,如果3脚Ck没有信号输入,则13脚O1一直输出高电平,如果直接与功率器件的基极相连,会导致功率器件过载发热甚至烧毁。因此,可以利用74HC245和HEF4081的组合来控制O1、O2、O3的输出,如图3所示。
在系统上电时,用AT89S52的I/O口设置74HC245的2脚输入端为低电平,同时设置74HC245的使能端19脚为低电平,使74HC245的18脚输出低电平,这样无论O1输出如何HEF4081的第3脚都输出低电平。再将PMM8713的15脚Co(freq_out)通过光电藕合连接到单片机AT89C52的INT0脚(如图4所示),一旦检测到PMM8713开始工作,AT89S52就设置74HC245的第2引脚为高电平,这样74HC245的18脚就输出高电平,打开HEF4081与非门,使O1、O2、O3脚输出的步进电机时序信号可以通过本级与非门控制。同时,为了使系统更加安全可靠,又增加了一级与门控制,由手动开关信号(PWMctrl开机时为低电平)接到第二级“与门”的一个“与”引脚,前一级“与门”输出接到第二级“与门”的另一个“与”引脚,由第二级“与门”的输出接到功率管TIP142的基极,这样的冗余设计增强了系统的可靠性(如图3所示)。
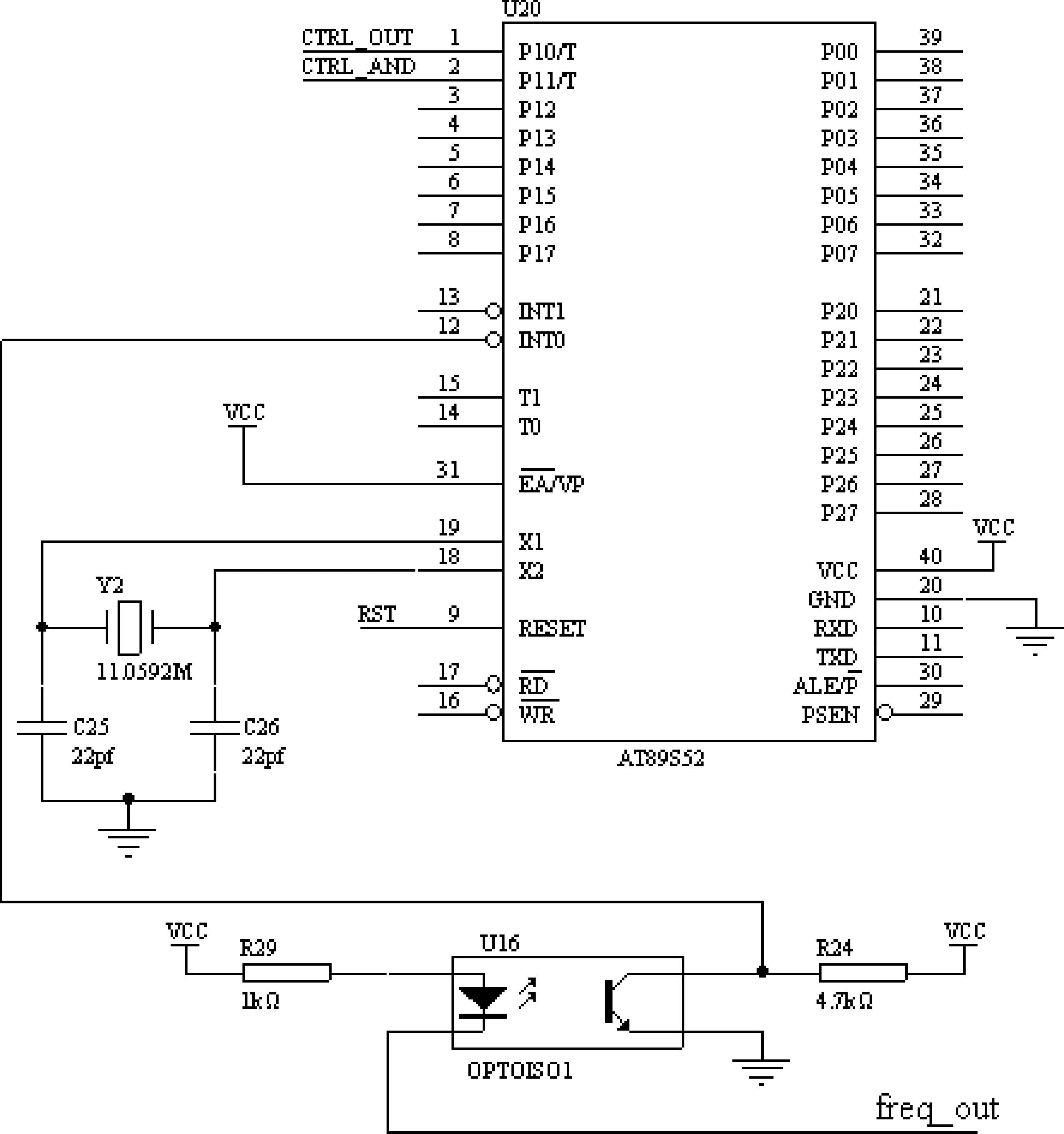
图4 检测PMM8713是否工作的电路
4 电机驱动电路设计
由于外接的步进电机功率较大,PMM8713输出的步进电机驱动时序信号驱动能力不足,所以步进电机的运行要有一电子装置进行驱动,这种装置就是步进电机驱动器,它是把时序脉冲信号转化为步进电机的角位移,即控制系统发出的每一个脉冲信号,通过驱动器就使步进电机转一步距角。
设Z为转子的齿数,N为步进电机的工作拍数,f为脉冲频率(Hz),则:
所以步进电机的转速与脉冲信号的频率成正比。通过控制步进脉冲信号的频率,可以对电机精确调速。
考虑到步进电机的功耗大,我们选用TIP142作为功率开关管。PMM8713的O1、O2、O3引脚输出的各相时序信号经过两级“与门”电路送至TIP142的基极,放大后驱动步进电机。步进电机驱动电路(以O1相为例)如图5所示,其中MG1为步进电机。
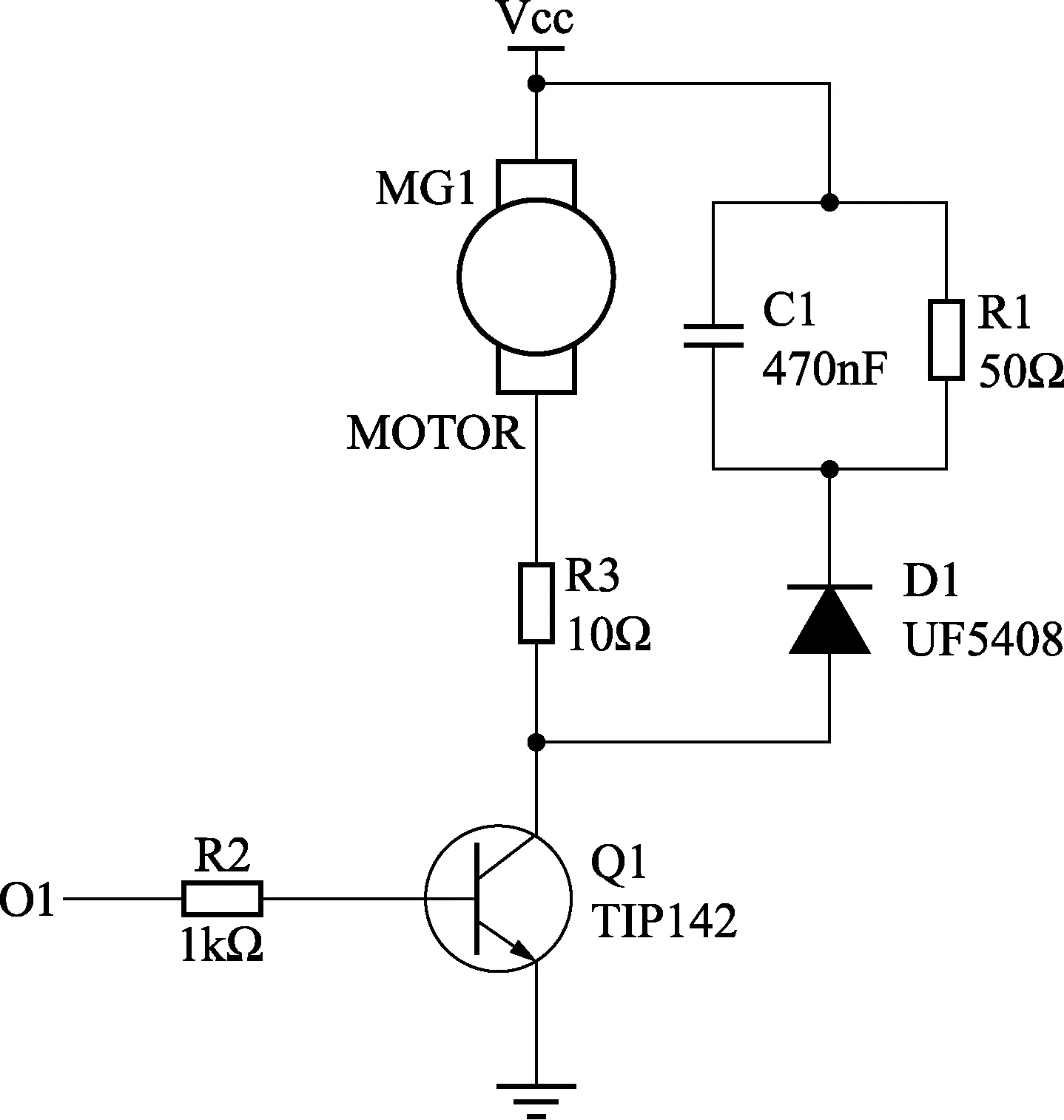
图5 步进电机驱动电路
5 几个值得注意的问题
5.1 TIP142的使用
使用TIP142,不仅要考虑最大的Ic,还有个重要的参数就是集电结功耗。CE压降乘以Ic就是集电结功耗。TIP142最大集电结功耗在25℃时是125W,每上升1℃最大功耗降低1W。所以通常加装比较好的散热器来降低温度。
5.2 步进电机的力矩会随转速的升高而下降
当步进电机转动时,电机各相绕组的电感将形成一个反向电动势,频率越高,反向电动势越大。在它的作用下,步进电机随转速的增大而相电流减小,从而导致力矩下降。所以我们用D1作为续流二极管,配合C1和R1来消除反向电动势的影响,如图3所示。
5.3 升降速设计
步进电机速度控制是靠输入的脉冲信号变化来改变的。从理论上说,只需给驱动器脉冲信号即可,每给驱动器一个脉冲(CP),步进电机就旋转一个步距角。但实际上,如果脉冲CP信号变化太快,步进电机由于惯性,它的机械运动将跟不上电信号的变化,这时会出现失步现象。所以步进电机在启动时,必须有升速过程,在停止时,必须有降速过程。升降速规律是根据实际选定的步进电机,经过多次现场试验总结出的规律数据,可将它存储在单片机的存储器中,实际工作时可直接调用。
6 结束语
该标准转速装置准确度等级为0.1级,经江苏省计量科学研究院检定合格,已经实际运行2年多,目前状态良好。
[1] 袁峥,等.高精度步进电机脉冲分配器设计.电力自动化设备,2005(12)
[2] 洪维华,等.一种新型步进电机脉冲分配器的研究.微电机,2004(02)
[3] 周明安,等.步进电机驱动技术发展及现状.机电工程技术,2005(02)
[4] 汪德彪.基于PMM8713的步进运动控制器设计.重庆工业高等专科学校学报,2001(10)
[5] 张友德等.单片微型机原理、应用与实验.复旦大学出版社,1996.7
[6] 刘同法.单片机C语言编程基础与实践.北京航空航天大学出版社,2009
[7] JJG 105—2000 转速表检定规程
猜你喜欢
中国农业信息(2021年3期)2021-11-22
轨道交通装备与技术(2021年5期)2021-11-19
电脑爱好者(2020年6期)2020-05-26
汽车维修技师(2018年7期)2018-12-07
电子制作(2017年13期)2017-12-15
电子制作(2016年15期)2017-01-15
光学精密工程(2016年5期)2016-11-07
核技术(2016年3期)2016-04-19
上海电机学院学报(2015年3期)2015-02-28
计算物理(2014年2期)2014-03-11