Protos2-2型卷接机组接烟鼓轮旋转鼓槽运动分析
2013-05-13 02:23毛仁凡祝智斌
湖南文理学院学报(自然科学版) 2013年1期
毛仁凡,祝智斌
Protos2-2型卷接机组接烟鼓轮旋转鼓槽运动分析
毛仁凡*,祝智斌
(常德烟草机械有限责任公司 研究所, 湖南 常德, 415000)
用Matlab软件分析了Protos2-2型卷接机组接烟鼓轮旋转鼓槽的运动特点, 得到了该运动中的一些相关参量之间的关系, 通过对接烟过程中鼓槽与蜘蛛手爪的位置关系分析, 从理论上验证了机组工作过程中旋转鼓槽不会与蜘蛛手爪运动发生干涉. 该分析方法可为接烟鼓轮改进设计提供指导.
Protos2-2型卷接机组; 接烟鼓轮; 旋转鼓槽; 运动分析
Protos2-2型卷接机组是目前世界上最先进的卷接机组之一, 在未来几年将成为我国卷烟行业的主力机型. 它采用了双烟枪技术, 大幅提高了卷烟生产速度. 其接烟鼓轮需要同时接收2根双倍长度烟支, 接烟过程比单烟枪卷接机组复杂很多[1]. 本文利用Matlab软件作图分析接烟鼓轮旋转鼓槽的运动特点及接烟过程中其与蜘蛛手爪的位置关系, 从理论上验证两者不会发生运动干涉.
1 接烟鼓轮的相关结构及工作过程
接烟鼓轮最外层可近似为中空圆柱体, 图1所示为圆柱体外圆的一部分, 其上有固定的半圆弧鼓槽1, 其接烟结构中轴与接烟鼓轮中轴相距168 mm; 另有可活动的爪2在外侧, 其一端带有旋转鼓槽3, 另一端连接有轴承4, 作为滚子在接烟鼓轮内部的槽凸轮轮槽中运动, 曲线C表示轴承的运动轨迹. 爪转折处固连的轴插入中空圆柱体孔6中, 该孔中轴距接烟鼓轮中轴146 mm.孔6中轴、固定鼓槽接烟结构中轴分别与接烟鼓轮中轴连线的夹角为11.0°. 接烟鼓轮共有14个固定鼓槽和14个旋转鼓槽, 其中固定鼓槽均匀分布在圆周上, 旋转鼓槽长= 90 mm. 接烟鼓轮工作时, 中空圆柱体的旋转通过孔6中的轴带动爪运动, 与爪端轴承在凸轮中的运动共同决定活动爪旋转鼓槽的位置. 图1也表示接烟鼓轮与蜘蛛手之间传递烟支时的情况, 7为蜘蛛手爪. 其外爪与固定鼓槽匹配, 内爪与旋转鼓槽匹配, 其内爪接烟结构中轴到接烟鼓轮中轴距离为206 mm.
可按烟支接收位置和烟支传出位置将接烟鼓轮每旋转一周的运动分成3个过程.旋转鼓槽运动到接烟位置, 与相应的固定鼓槽同时共接收2根双倍长烟支; 接烟后, 旋转鼓槽逐渐运动到固定鼓槽所在圆周上, 且与相邻两固定鼓槽的距离相等, 在进入传烟位置之前, 使得烟支在鼓轮表面均匀分布, 进而将烟支传递给烟支切割鼓轮; 之后旋转鼓槽运动再次进入接烟位置.鼓槽上带有气孔, 通过负压空气使得烟支传递出去之前能被吸附在槽内.

图1 接烟鼓轮局部结构及接烟位置
2 接烟鼓轮旋转鼓槽的运动分析
根据凸轮的数控加工坐标点可得图2所示接烟鼓轮中凸轮从动件轴承的位移线图[2], 对其采用6阶多项式拟合. 为提高曲线拟合精度, 对> 2 mm部分拟合得到方程=(), 其系数为(-30.991,-79.532, 78.849, 89.813,-77.962,-26.543, 136.975), 相关系数2= 0.999 9. 相应范围为(-45.7°, 42.3°). 此范围外旋转鼓槽基本贴在中空圆柱体表面作圆周运动. 下文所分析双倍烟支长度取卷接机组可用的最大长度180 mm.

图2 凸轮从动件轴承位移线图
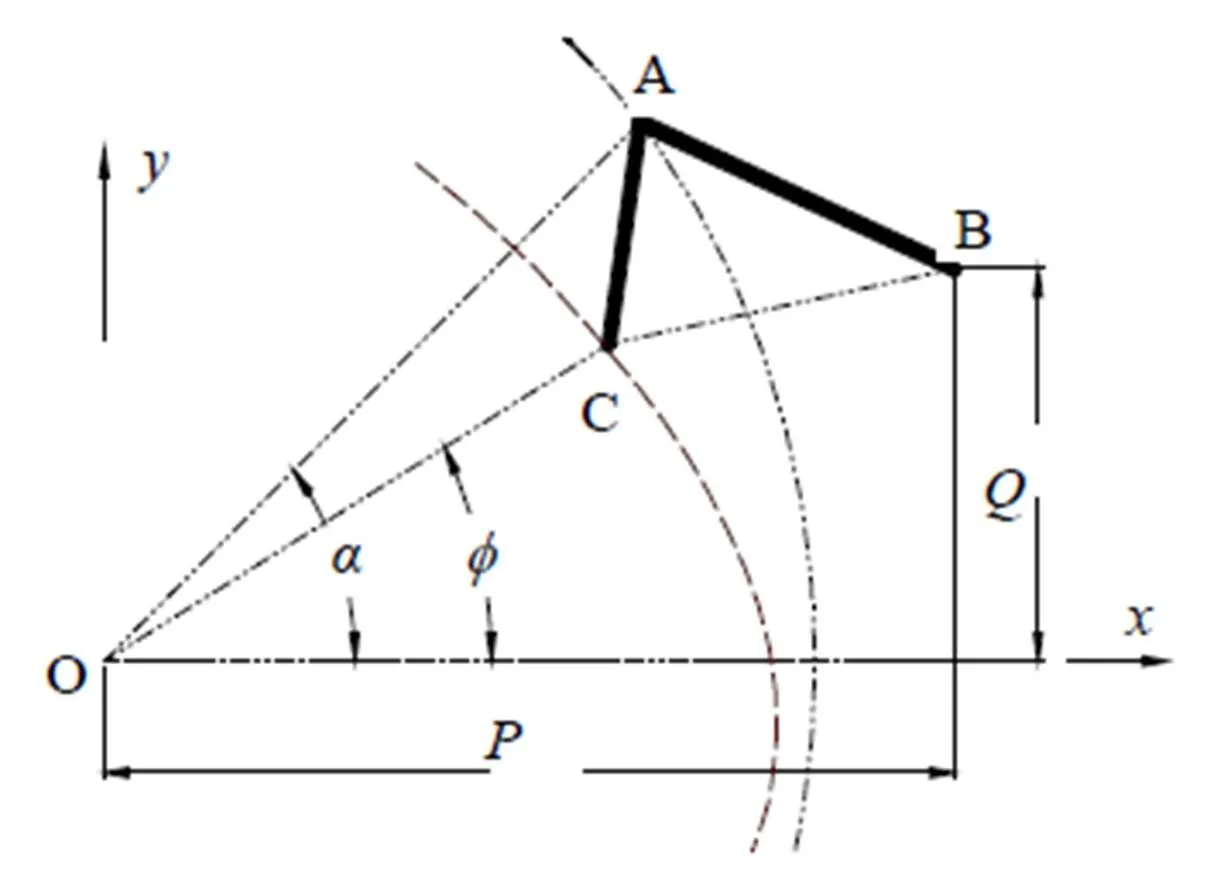
图3 活动爪简化模型
活动爪简化模型如图3中结构CAB所示, AC = 40.0 mm, AB = 68.3 mm, ∠CAB = 73.6°. 其中点A随接烟鼓轮做圆周运动, 点C对应轴承中心, 点B为旋转鼓槽接烟结构中轴.以图1所示接烟时接烟鼓轮中轴到固定鼓槽接烟结构中轴方向为轴正方向, 竖直向上为轴正方向(图3), 其中,分别表示,方向位移. 建立活动爪旋转鼓槽接烟结构中轴B随变动的方程. 通过Matlab软件绘图得到点B的轨迹(图4)及与的关系曲线(图5)[3]. 当= 11.0°时,max= 206 mm, 此距离正是接烟时旋转鼓槽方向所需位移, 从理论上验证了凸轮轮廓满足接烟需求. 由图5可得当> 168 mm时,∈ (-14.0°, 43.0°), 此范围内旋转鼓槽进入了蜘蛛手爪出现的区域, 可能会发生运动干涉.

图4 旋转鼓槽B点运动轨迹

图5 相匹配的蜘蛛手爪及旋转鼓槽y向位置关系. 1—函数N - Q曲线 2—函数P曲线.
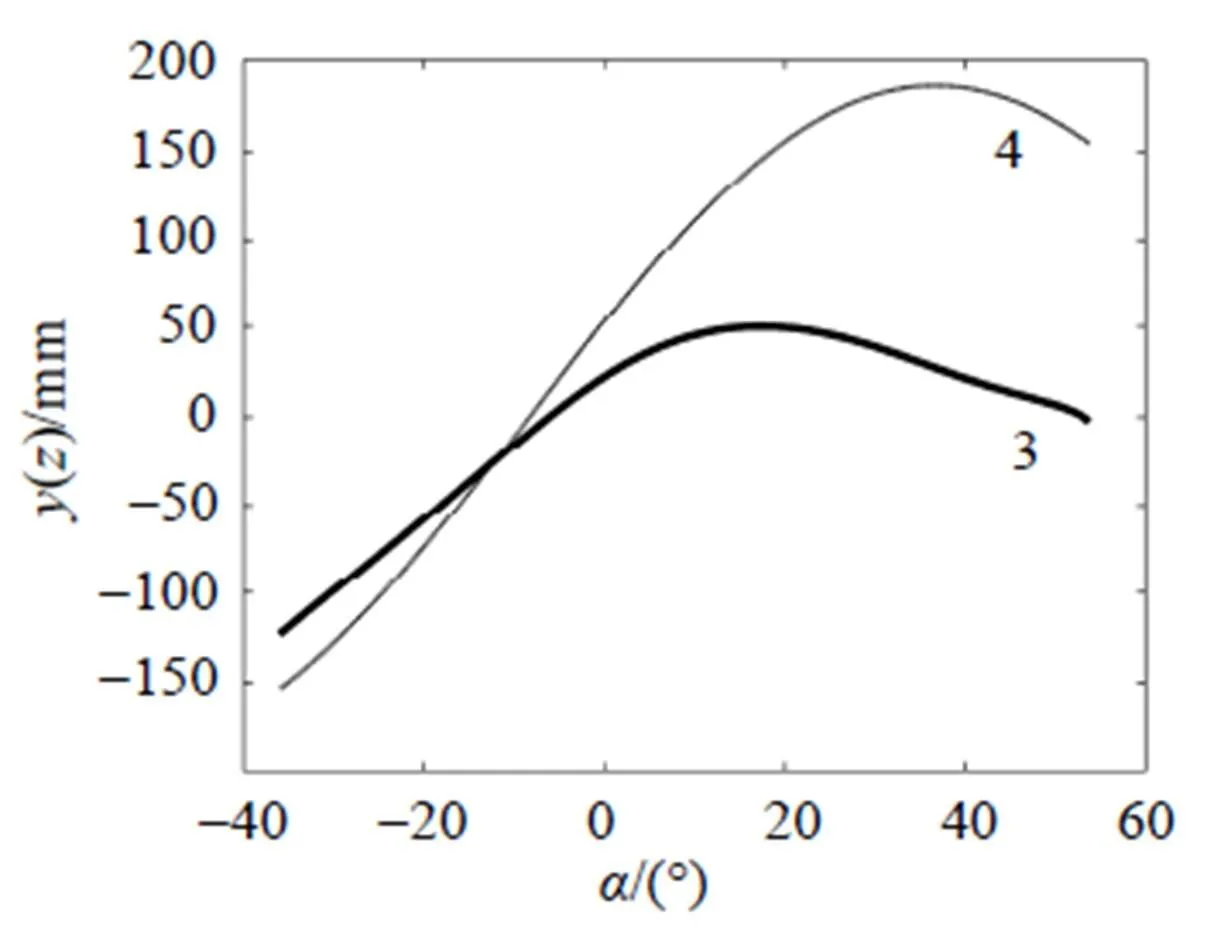
图6 旋转鼓槽与下一蜘蛛手爪y向位置关系. 3—函数Q-N-30.5曲线; 4—函数M曲线.
3 接烟鼓轮旋转鼓槽与蜘蛛手爪运动干涉分析
由于活动爪在接烟鼓轮圆周上均匀分布, 只需分析单个活动爪上旋转鼓槽与蜘蛛手爪的位置关系. Protos2-2型卷接机组采用7爪蜘蛛手, 相应的= 144 mm,= 46 mm[4]. 其角速度为接烟鼓轮的1倍.接烟时, 旋转鼓槽位于与其匹配的蜘蛛手爪与晚2π/(7)进入接烟位置的蜘蛛手爪之间, 分析该旋转鼓槽与它们是否运动干涉. 以蜘蛛手轮体中轴到接烟位置的方向为轴正方向,轴正方向同前, 取接烟时为计时零点, 此时0= 11.0°, 相匹配的蜘蛛手手爪公转角度= 2(-0), 建立蜘蛛手爪轴位移关于的函数, 相应的轴位移为. 图5中-曲线表示相匹配的蜘蛛手爪和旋转鼓槽向的位置关系, 分析得其值始终不小于0, 即两者不会发生运动干涉. 图4中,> 205 mm时, 曲线上对应点向变动约为29.0 mm, 此段近似为竖直向上运动, 同时对应的蜘蛛手爪也做近似的竖直向上运动, 且两者竖直方向距离-< 0.7 mm, 曲线1斜率接近于0, 即速度差小, 有利于烟支的平稳柔和交接.
旋转鼓槽与比其晚2π/(7)进入接烟位置的蜘蛛手爪的位置关系如图6中曲线3所示, 相应函数--30.5, 其中30.5 mm为修正尺寸. 以下对可能干涉的范围(-14.0°, 43.0°)分2个阶段讨论: 旋转鼓槽未到接烟位置, 此时旋转鼓槽未接收烟支, 即∈(-14.0°, 11.0°), 当> (+)-180/2-/2 = 51 mm(由图6曲线4可得此时>-0.4°)时, 带烟支的蜘蛛手与不带烟支的旋转鼓槽在平面的投影有重叠, 但该阶段--30.5 > 0, 即旋转鼓槽始终在相应蜘蛛手爪上方, 无运动干涉; 当旋转鼓槽到接烟位置取得180 mm烟支后, 此时∈ (11.0°, 43.0°), 相应> (+)-180/2-180/2 = 6 mm(此时>-7.4°), 同上分析可知无运动干涉. 即接烟鼓轮旋转鼓槽与蜘蛛手爪运动时不会发生干涉.
4 结语
本文通过对接烟鼓轮旋转鼓槽及其与蜘蛛手爪位置关系的分析, 揭示了接烟鼓轮旋转鼓槽的运动规律, 从理论上验证了机组工作时, 接烟鼓轮旋转鼓槽不会与蜘蛛手爪发生运动干涉. Matlab绘图能在指定的精度范围内形象且精确地描叙各种运动规律, 是分析复杂运动的有效手段[5]. 当对接烟鼓轮、蜘蛛手等进行改进设计时, 可采用作图法来验证系统的运动干涉情况, 指导相应参数的选用.
[1] 编写组. YJ17-YJ27卷接机组[M]. 北京: 中国科学技术出版社, 2001: 118—119.
[2] 申永胜.机械原理教程[M]. 北京: 清华大学出版社, 1999: 90—134.
[3] 张志涌, 杨祖樱. Matlab教程[M]. 北京: 北京航空航天大学出版社, 2010: 120—156.
[4] 王大林, 杨月玲. YJ17卷烟机蜘蛛手吸爪的运动分析及工装核算[J]. 郑州轻工业学院学报, 1999, 14(1): 22—24.
[5] 徐宏海, 吴晚云, 张超英.回转式飞剪机剪刃运动干涉分析与计算机仿真[J].中国冶金, 2005, 15(9): 36—38.
The movement analysis of movable grooves of the take-over drum in protos 2-2 cigarette making and filter assembling group
MAO Ren-fan, ZHU Zhi-bin
(Research Institute, Changde Tobacco Machinery Co. Ltd, Changde 415000, China)
By the movement analysis on movable grooves of the take-over drum in protos 2-2 cigarette making and filter assembling group by Matlab, it shows the relationship among the related parameters of the movement, it also proves that the interference between movable grooves of the take-over drum and the transfer units does not exist when working. The analysis method can guide the improved design of the take-over drum.
protos 2-2 cigarette making and filter assembling group; take-over drum; movable groove; movement analysis
10.3969/j.issn.1672-6146.2013.01.022
TS 43
1672-6146(2013)01-0089-03
email: mrf04@163.com.
2013-01-17
(责任编校:江 河)
猜你喜欢
金桥(2022年7期)2022-07-22
中国新技术新产品(2022年24期)2022-03-24
房地产导刊(2021年11期)2021-11-27
房地产导刊(2021年11期)2021-11-27
装备制造技术(2021年12期)2021-04-23
湖南文理学院学报(自然科学版)(2020年4期)2020-11-25
房地产导刊(2020年7期)2020-08-24
装备制造技术(2019年6期)2019-08-15
电子制作(2018年24期)2019-01-03
荣誉杂志(2017年7期)2017-08-23