基于AR模型的水下目标检测方法
2013-04-28 07:11路野周江胡钰铣
船电技术 2013年1期
路野,周江,胡钰铣
基于AR模型的水下目标检测方法
路野1,周江1,胡钰铣2
(1. 军事经济学院, 武汉 430035;2. 92985部队, 厦门 361100)
本文提出了一种基于AR模型的水下目标检测方法。该方法对预先获得的环境噪声信号建立AR模型并求解其参数,对采集到的可疑信号以相同的阶数建立AR模型并求其参数。通过比较噪声模型系数和被测目标信号模型系数的差异来判断是否有目标存在。用该方法对模拟舰船信号、舰船模型信号和海试实测数据进行了分析并与能量检测器的结果进行了比较,结果表明该方法与能量检测器的性能相差不大,可以在较低的信噪比下检测出目标信号。
AR模型 目标检测 能量检测器
0 引言
水下目标被动检测已经研究了几十年,得到了许多有效的检测器。如能量检测器、小波检测器、双谱检测器和匹配滤波检测器等。各种方法都有自己的适用范围。如能量检测器在高斯背景下检测高斯信号是最优的[1]。当信号波形已知,且噪声为白噪声或谱密度已知的色噪声时,匹配滤波器是最佳线性滤波器,如果噪声是高斯的,则匹配滤波器是使输出信号信噪比最大意义上的最佳滤波器。当信号波形未知或对谱密度未知的有色加性噪声中的已知波形确定性信号进行检测,或对加性噪声中的非高斯随机信号进行检测时,匹配滤波器就不是最佳的了[2]。小波检测器主要用于瞬态信号的检测,双谱检测器要求信号有较强的非高斯性[3,4]。本文提出了一个基于AR模型的水下目标检测方法,检测结果与能量检测器的检测结果进行了比较,结果说明本文提出的方法也能得到较好的检测效果。
1 AR模型及阶数的确定
AR模型建立在以上的假设基础上:
(1) 过去一段时间收集到的数据精确的刻画了历史;
(2) 历史会重复自己,因此可以利用过去的数据对未来进行预测。
AR(p)模型的表达式如下:

其中:φφφ..φ为自回归系数;p为自回归的阶数,ε为白噪声。
理论上可根据满足AR(p)模型的平稳时间序列的的两个重要性质:(1)自相关函数的拖尾性;(2)偏相关函数的截尾性,来判断模型的结构和阶次[5]。
其中自自相关函数的定义为:

偏自相关是时间序列{x}在给定了x, x,… x的条件下,通过剔除其它各个的影响,x与滞后k 时间序列之间的条件相关。它用来度量当其它滞后1 , 2 , 3 ,⋯, k - 1 时间序列的作用已知的条件下,x与x之间的相关程度。这种相关程度可用偏自相关系数来度量Φ,可用偏自相关系数来初步判定模型的阶数,偏相关系数可用递推法求解,其计算公式为:

但是在实践中,这个定阶原则在操作上具有一定的困难,因为由于样本的随机性,样本的偏相关系数不会呈现理论截尾的完美情况。因此模型的定阶在很大程度上依靠分析人员的主观经验。样本的自相关系数和偏自相关系数的近似分布可以帮助缺乏经验的分析人员做出尽量合理的判断。
在实际工程中可以根据FPE(最终预报误差)准则来确定模型的阶数,计算公式为:


当分别取1,2,……-1时,可求得不同的FPE()值,其中最小FPE()对应的值即为模型阶数的估计值。另外根据经验分析,模型阶数可取值于/10与/4之间。如果>50,可取
2 海洋环境噪声建模


3 AR模型检测原理

给定一门限值,当>时,认为两个信号之间有较大差别,判断为有目标信号存在,当<时,认为被测信号和噪声信号差别不大,判断为无目标信号存在。门限值的选择与系统的虚警率有关,虚警率越大,值越小,反之,值越大。本文中根据噪声的统计性质来和虚警率来得值。AR模型检测的流程图如图2所示。
4 AR模型的检测效果
4.1 模拟目标噪声信号

图2 AR模型检测方法流程图
目标噪声的仿真模型如下[6]:
其中()为零均值、单位方差的白噪声;f为基频,此处选择f=7.93 Hz;采样频率为1024 Hz;仿真波形如图3所示。令虚警率为0.5%,广义高斯噪声参数=1,用本文给出的方法对目标仿真信号进行检测,得到的ROC曲线如图4所示。图中同时画出了能量检测的检测结果,从图中可以看出,基于AR模型的检测方法稍微优于能量检测器方法。

4.2 目标模型噪声信号
下面以实际测得的目标模型的噪声数据来分析本文所给方法检测能力。目标模型辐射噪声频段160 ~190 Hz,采样频率3 kHz,数据波形如图5所示。分析中令虚警率为0.5%,广义高斯噪声参数=1,取样本点数N=3000,AR模型方法和能量方法得到的检测结果如图6所示。从图中可以看出,对于湖试实测的目标模型噪声信号,AR模型方法同样有较好的检测能力。
4.3 实测水下目标噪声信号
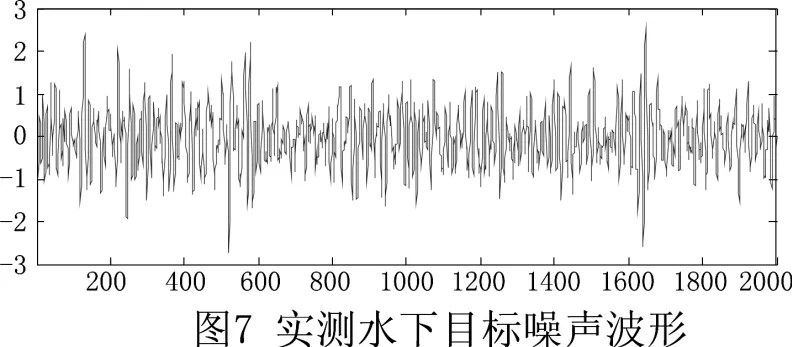
下面以某次海上试验的实测数据对本文所给方法的检测性能作一分析。

试验海域水深约30 m,数据采集系统布放于海底,采样频率为40 kHz。被测目标以一定速度由远及近从采集系统附近经过。对被测数据进行降采样至2000 Hz,数据的时域波形如图7所示。通过向测得的数据中加入广义高斯噪声来分析AR模型方法在不同SNR下的检测性能,检测曲线如图8所示。图中标示的信噪比是观测信号与加入噪声的能量比。由图可见,AR模型同样有较好的检测能力。
5 结论
本文研究了运用AR模型方法实现对水下目标的检测。该方法先对环境噪声建立AR模型并求解其参数,然后对采集到的信号样本以相同的阶数建立AR模型并求解其系数,比较两个模型系数差异来判断有无目标信号。通过对仿真目标信号、舰船模型信号和实测的海试数据分析并与能量检测方法的结果进行比较,AR模型检测方法有较好的检测性能,具有一定的工程实际意义。
[1]. Abhishek Singh, AArun Kumar, Monika Agrawal, Rajendar Bahl. Hybrid detector for ship radiated signal in statistically varying underwater noise, 2006.
[2]. 杨晨阳,屈剑明,李少洪等. 高阶统计量在检测中的应用[J]. 信号处理,1995,11(4),188-294.
[3]. 周越,杨杰,胡英. 基于高阶累积量的水声噪声检测与识别[J]. 兵工学报,2002,23(1), 72-78.
[4]. 刘勋,周越,相敬林. 海洋噪声中舰船辐射噪声的一种检测方法[J]. 数据采集与处理,2000,15(3):301-306.
[5]. 王燕. 应用时间序列分析[M]. 北京:中国人民大学出版社,2005.
[6]. 刘刚,相敬林. 舰船宽带噪声双谱分析与波形重构[D]. 西北工业大学,2001.
Detection of Underwater Target Based on AR Model
Lu Ye1, Zhou Jiang1, Hu Yuxian2
(1. Military Economy Academy, Wuhan 430035, China; 2. Unit 92985, Xiamen 361100, Fujian, China)
TP216
A
1003-4862(2013)01-0001-03
2012-04-23
国家部委基金资助项目(4010709010201)
路野(1981-),男,讲师。研究方向:信号处理。
猜你喜欢
华东师范大学学报(自然科学版)(2021年3期)2021-06-03
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
火力与指挥控制(2018年10期)2018-11-13
教育教学论坛(2018年39期)2018-09-25
中国交通信息化(2017年9期)2017-06-06
电子制作(2017年10期)2017-04-18
工业设计(2016年11期)2016-04-16
电影故事(2015年16期)2015-07-14
电讯技术(2014年1期)2014-09-28