基于CAN总线的舰船主动力仿真系统设计
2013-04-28 07:11王晓东张丹瑞
船电技术 2013年1期
王晓东,张丹瑞
基于CAN总线的舰船主动力仿真系统设计
王晓东,张丹瑞
(上海船舶运输科学研究所军品分所, 上海 200135)
为提高舰船主动力监控系统调试的效率,缩短主动力监控系统的出厂检验时间,增强学员系统操作培训的效果,我设计了基于CAN现场总线的舰船主动力半实物实时仿真系统。本文建立了舰船主动力系统的Simulink模型,通过CAN总线将I/O接口箱和仿真计算机相连,将Simulink中的模型数据与VC程序实时交互,并由VC界面实时显示。该系统应用于舰船主动力系统调试中,并获得了良好的调试效果,满足设计的要求。
CAN总线 舰船主动力系统模型仿真 Simulink实时仿真 VC界面显示
0 引言
国外自七十年代初开始进行舰船主动力监控系统的仿真应用研究。刚开始是物理模拟,后来随着计算机的快速发展,到七十年代末就开始进入数字仿真和半实物模拟,并在指导舰船动力系统的论证,设计,试验等方面发挥了重要作用。
本文主要实现仿真功能有:舰船柴油机仿真、摩擦片式离合器接、脱排仿真、螺旋桨动力仿真、动力系统监测报警仿真、故障设置仿真等。本系统实现模型实时仿真,与VC界面程序实时交互数据,并通过CAN总线与I/O接口箱通信。采用CAN总线通讯结构,使得本套半实物仿真系统大大提高了模拟调试的效率、可靠性,并极大增强了仿真系统硬件接口的扩展性。通过主动力监控系统实际项目的调试,验证这套舰船主动力半实物实时仿真系统符合设计要求。
1 舰船主动力仿真系统的基本原理
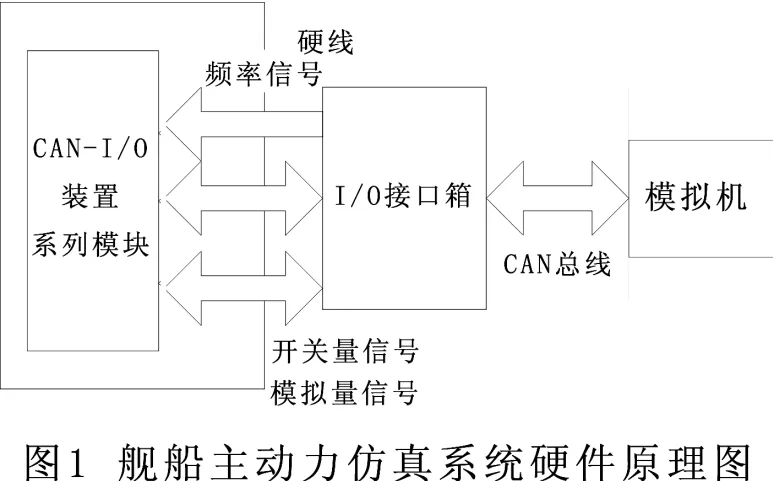
1.1 舰船主动力仿真系统的硬件原理
舰船主动力半实物仿真系统的硬件组成如图1所示,虚线内为外部系统。模拟机与I/O接口箱通过CAN总线相连,I/O接口箱再通过硬线与某型舰船主动力监控系统相连。硬线主要传输开关量信号——主机起动命令、离合器接排命令、主机故障停车信号等;频率信号——主机转速、轴系转速、A列增压器转速等;模拟量信号——主机油门给定、桨角给定、离合器工作油压等。I/O接口箱中主要包含了CAN-I/O系列模块,其主要功能为将开关量信号、模拟量信号、频率信号转换为电信号,传送到CAN总线上或将CAN总线上的电信号转换为开关量信号、模拟量信号、频率信号,通过硬线传送到舰船监控系统中。通过增加、减少CAN总线的节点数,就可以对I/O接口箱中模块进行增减,使得系统具有良好的可扩展性;并且单个模块损坏不会影响其它模块的工作,提高了系统的可靠性。模拟机选用工控机主要实现模型Simulink实时仿真、VC界面显示功能。
1.2 舰船主动力仿真原理
舰船主动力仿真原理如图2,虚线内为外部系统。通过外部主动力监控系统的调速器对主机——柴油机的控制,实现调速功能,柴油机产生动力矩,通过传动装置(主要为离合器、齿轮箱、轴系等)传递到螺旋桨,螺旋桨产生船舶前进或后退的推力,并与船体阻力和其它摩擦力之间的不平衡,导致船速发生变化[1]。

1.2.1舰船主动力仿真公式
根据图2所示,主机、桨、船体平衡方程为:
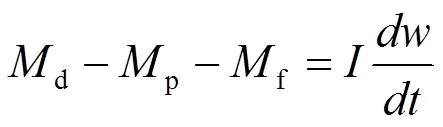
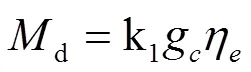



式中:M为主机输出扭矩(Nm)、M为桨阻力负荷扭矩(Nm)、M主机、轴、桨摩擦阻力扭矩(Nm)、为主机转速角速度(rad/s)、为主机、轴、桨(连水)转动惯量(kg*m2)、k为常数,k=9550*H/60,其中H为常数、g为循环供油量(kg/cyc*m)、η为热效率、Z为螺旋桨数量、为一个螺旋桨的有效推力(N)、为船舶质量(kq)、m为船舶负载连水的质量(kq)、V为船速(m/s)、V为螺旋桨进速(m/s)、为螺旋桨推力减额系数、w为伴流系数、k为推力系数、为水密度(约为1026 kg/m3)、为主机转速(r/min)、为螺旋桨直径(m)、为船体的运动阻力(N)、为阻力总系数、为浸水面积、k为阻力系数。其中g为油门齿条位置h、主机转速n的函数:g=f(h,n)且g正比于h、n;η为曲轴输出的有效功的热当量与所消耗的燃料热当量的比值,随n上升,η下降;w影响因素很多,简化为常数。
1.2.2摩擦片式离合器的仿真分析
本套仿真系统针对图2中的传动装置之离合器的选型,采用摩擦片式离合器并进行仿真,其主要优点为接脱排非常迅速,缺点为主机负荷变化大。离合器是船舶动力传动系统的重要部件,它依靠主从动片之间的摩擦力矩来传递动力,并通过分离与接合来控制舰船动力传动系统的工作状态。图3是离合器在舰船动力传动系统中的位置及力学示意图[2]。
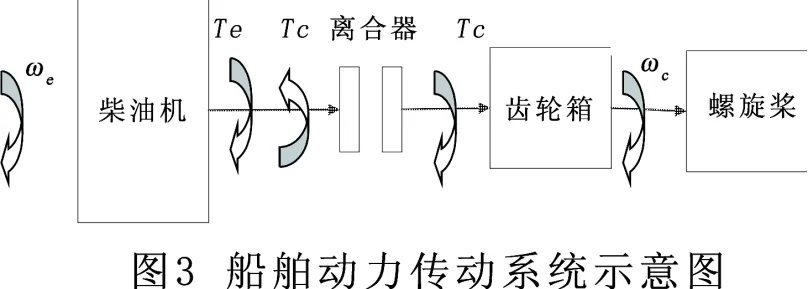

是柴油机的输出转矩;是离合器传递的摩擦力矩;是等效到齿轮箱输入轴的螺旋桨运行阻力矩;ω是发动机曲轴角速度(也是离合器主动片角速度);ω是离合器从动片角速度;J是柴油机转动部分惯量;J是等效到齿轮箱输入轴上的转动惯量;
离合器工作过程可以分为完全接合、完全分离和滑磨3 个状态。图4是狭义动态摩擦系数和输入力矩影响系数与相对滑动速度的关系[2]。

1.2.3Simulink实时仿真
利用MATLAB中Simulink仿真舰船主动力系统。实现柴油机、摩擦片离合器、螺旋桨、船舶动力、阻力的仿真。利用Simulink中RTW实时仿真功能,实现模型的实时仿真[3]。
2 舰船主动力仿真系统的实现
2.1 基于CAN总线的通讯的实现
本套仿真系统采用CAN收发装置、CAN-I/O系列模块和仿真计算机组成CAN总线通讯网络,如图5。仿真机将开关量、模拟量和频率信号通过CAN收发装置发送到CAN总线上,由CAN-I/O系列模块接收电信号,再转换成开关量、模拟量信号发送到外部设备中。通讯协议为CAN2.0B,利用VC、USBCAN函数库编写程序实现通讯。
2.2 Simulink与VC之间实时通讯
本系统采用在VC环境中使用MATLAB引擎的方法。在C/C++与MATLAB混合编程过程中,使用MATLAB引擎是一种相对高效、简易的方法。MATLAB的引擎库提供一些接口函数,利用这些接口函数,用户可以在自己的程序中以计算引擎方式调用MATLAB。主要接口函数有:enOpen、engGetArray、engEvalString、engClose、engGetVariable、engPutVariable等[4]。利用VC编写界面实时显示数据及仿真图像,主要显示实时转速等数值、主机起动等开关量信号。并实现起动条件联锁等监测报警点的模拟、主机滑油压力等模拟量输出、A/B列增压器转速等模拟频率输出的功能。

3 结论
本文基于CAN总线网络,实现了舰船主动力半实物实时仿真系统,并在舰船主动力监控系统调试中,完全满足对仿真系统的要求,充分实现了舰船监控系统对各项遥控、监测报警的仿真功能,缩短了设备出厂调试的时间,提高了学员对系统操作的能力,达到对仿真系统设计的目的。
[1] 王国强,盛振邦. 船舶推进[M]. 上海交通大学出版社,1995.
[2] 王玉海,宋健,李兴坤. 离合器动态过程建模与仿真[J]. 公路交通科技,2004, 21(10) a) 167-171.
[3] 张维竞. 船舶动力装置系统仿真[M]. 上海交通大学出版报社, 2006.
[4] 张亮,王继阳等. MATLAB与C/C++混合编程[M].中国人民邮电出版社, 2008.
Simulating System Design Of Ship Propulsion Supervisory Control System Based on CAN Fieldbus
Wang Xiaodong, Zhang Danrui
(Military Products Sub-Institute, Shanghai Ship and Shipping Research Institute, Shanghai 200135, China)
TP391
A
1003-4862(2013)01-0050-03
2012-05-07
王晓东(1985-),男,硕士。研究方向:轮机工程。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2021年12期)2021-03-29
航空发动机(2020年3期)2020-07-24
测控技术(2018年12期)2018-11-25
兰台世界(2017年10期)2017-06-01
电子制作(2016年21期)2016-05-17
舰船科学技术(2016年1期)2016-02-27
电测与仪表(2015年11期)2015-04-09
中国舰船研究(2014年1期)2014-05-14
铁路通信信号工程技术(2014年5期)2014-02-28