GPS观测数据的仿真*
2013-04-27 07:27李英冰
全球定位系统 2013年2期
周 雨,李英冰
(武汉大学测绘学院,湖北 武汉430079)
0 引 言
仿真GPS观测数据的系统的误差和随机误差都是可以人为控制的,使用的各种模型参数都是精确已知的,使得GPS仿真数据在测试GPS数据解算软件的正确性、基于GPS观测值的定轨方案论证分析、评论各种GPS算法性能等方面,都比实际观测数据更有优势[1-3]。
GPS的仿真数据一般由模拟生成器或仿真软件实现,如GPSLab、瑞士的伯尔尼大学研制的精密GPS定位软件中的GPS仿真模块等[4-6]。但GPS仿真生成器的价格较高,又无法获得其他国外仿真软件的源代码[4],因此GPS仿真对我们研究卫星导航,如北斗卫星导航定位系统等,都有着非常重要的现实意义。
从单点定位的原理出发,考虑电离层延迟、对流层延迟、卫星钟差、接收机钟差、多路径效应、相对论效应、地球自转改正、测量噪声等影响因素[6-8],自主设计面向用户的GPS观测值仿真软件,模拟伪距和载波的生成,并以IGS跟踪站的实际观测数据为参考,对模拟值与真实值进行定量比较,并定性的分析出现误差的原因,进一步明确模拟观测的可行性和稳定性。
1 仿真观测值的生成原理
GPS观测值的仿真,是利用用户任意给出的测站三维坐标来模拟该测站观测的GPS信号。GPS卫星发射的信号由载波、测距码和导航电文三部分组成,主要对伪距和载波进行模拟,对他们建立如下的观测方程[7-8,3]。
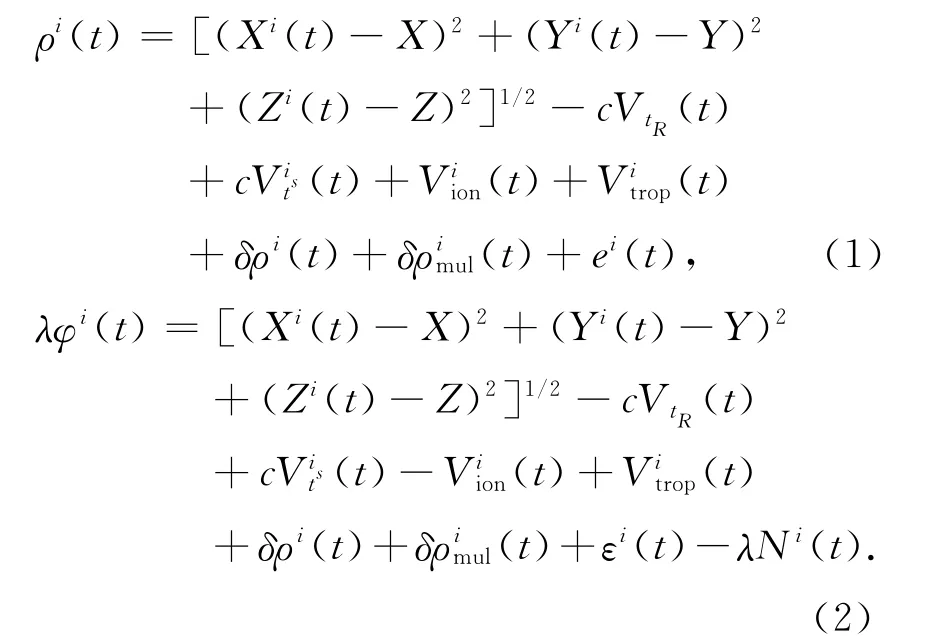
式中:i为卫星编号;t为时刻;ρi为接收机至观测码伪距;XiYiZi为卫星的WGS-84坐标;XYZ为接收机的WGS-84坐标;c为光速;VtR为接收机钟差;为卫星钟差;为电离层延迟改正;为对流层延迟改正;δρi为地球自转改正;δρimul为多路径效应改正;ei,εi分别为观测噪声;λ为相应载波的波长;φi为载波相位观测值;Ni为整周模糊度。
在式(1)、(2)中,卫星坐标XiYiZi和卫星钟差Vits可以根据IGS发布的精密星历进行拉格朗日插值得到,接收机坐标XYZ可以由模拟条件直接给出,电离层延迟改正Viion、对流层延迟改正Vitrop、地球自转改正δρi、多路径效应δρimul可以采用相应模型改正,测量噪声eiεi可以通过随机模型直接生成。
2 仿真观测值软件的设计
GPS观测值仿真的具体过程为:首先,根据模拟的观测时段读取对应的IGS发布的间隔15min的精密星历,并将其进行拉格朗日插值得到与模拟采样率间隔一致的精密星历;其次,从该插值的精密星历文件中获取卫星坐标、卫星速度和卫星钟差,根据卫星坐标与模拟的测站坐标判断卫星的可视情况,并计算出测站到卫星的几何距离;复次,根据模型公式对电离层延迟和对流层延迟进行计算,按照相应模型公式计算地球自转延迟、相对论效应延迟、多路径效应延迟,并对接收机钟差和测量噪声进行随机模拟;再次,将各项延迟改正按照用户需要加入测站到卫星的几何距离中,得到伪距的仿真值,再加入相位观测的初始模糊度和随机周跳值,得到模拟的载波相位观测值;最后将数据按照Rinex文件格式进行整理,生成用户需求的观测值文件。其具体流程图如图1所示,程序的运行的界面如图2所示。
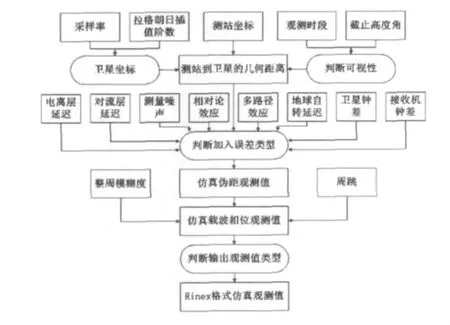
图1 程序的流程图
3 仿真实验与结果
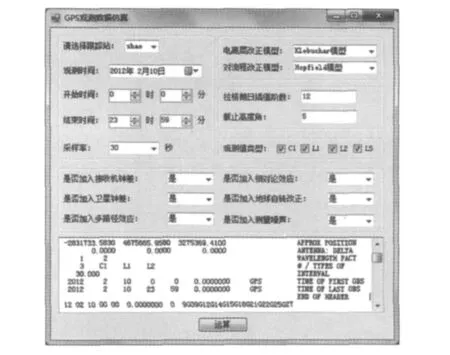
图2 软件运行截图
利用上述的仿真观测软件,选择现有的IGS全球跟踪站作为参考位置,下载实际观测值与仿真观测值进行对比研究。仅选取了上海站(shao)的模拟观测结果与真实观测结果进行对比分析。在整个仿真过程中,参数设置依次为:观测时段为2012年2月10日0时0分至23时59分,采样率为30s,截至高度角为5°,电离层改正采用Klobuchar模型,对流层改正选用Hopfield模型,多路径效应改正、接收机钟差、地球自转改正、相对论效应改正、测量噪声均采用相应的模型。
从图3可以看出虚拟观测到的卫星与实际观测的卫星基本一致,由于虚拟观测设定的截止高度角为5°,与上海站(shao)的实际观测情况有出入,所以出现了部分时段虚拟观测的卫星与实际观测的卫星数不符。图4示出了2号卫星的真实C1、L1、L2值与虚拟C1、L1、L2值的差值,在200个观测历元中,C1差值变化不大且都在0到10 m的范围中,L1和L2差值都在-30周至30周的范围内,基本满足GPS单点定位的精度要求。图5示出了对所有卫星的真实C1值与虚拟C1值的差值统计情况,差值基本出现在0到10m的范围内,仿真的观测值与实际观测值相差不大,主要误差可能是模型改正不精确造成的,还有其他的一些误差可能来自实际观测的外部环境、IGS精密星历文件。
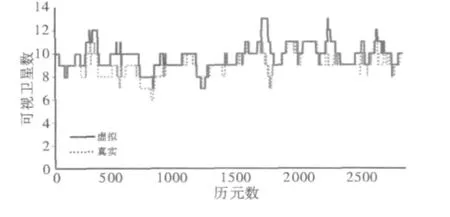
图3 可视卫星总数对比

4 结 论
基于GPS观测值的生成原理,采用面向对象编程方法,开发了GPS观测值的仿真软件,该软件经过初步的试用,得到了较高精度的GPS仿真观测值,基本满足单点定位的精度要求,可以为其他相关科学的研究与应用提供参考。
随着计算机硬件和软件技术的发展,仿真的成本会越来越低,仿真的结果会越来越真实,仿真系统在GNSS导航的各个领域都将有更加广泛的应用。
[1] 匡翠林,邹 璇,李 陶.利用IGS数据产品进行高精度GPS观测数据仿真[J].系统仿真学报,2007,19(12):2857-2859.
[2] BARTLETT S,LEGRAND R,STATION,E.A-nalysis and simulation of discrete Kalman filtering applied to a GPS receiver[J].Naval Engineers Journal,1996,108(1):29-36.
[3] ELSA M,MAURICIO G,CLAUDIO B.SiGOG:simulated GPS observation generator[J].GPS Solution,2005(9):250-254.
[4] 范国清,王 威,郗晓宁.高精度GPS观测数据的实时仿真研究[J].国防科技大学学报,31(3):60-64.
[5] 郝 明,崔笃信,王庆良,等.高动态GPS观测数据的仿真研究[J].测绘科学,2008,33(6):60-62.
[6] 朱伟刚,陶春燕.GPS观测数据的建模与仿真[J].海洋测绘,2007,27(5):26-29.
[7] 裴 霄,王解先.GPS伪距单点定位的精度分析及改进[J].海洋测绘,2012,32(1):5-7.
[8] 廖 华.GPS伪距单点定位算法的综合比较[J].测绘科学,2011,36(1):20-21.
猜你喜欢
地理空间信息(2022年10期)2022-10-31
导航定位学报(2022年5期)2022-10-13
北京航空航天大学学报(2021年9期)2021-11-02
今日农业(2021年15期)2021-10-14
矿山测量(2021年2期)2021-05-07
矿山测量(2020年6期)2021-01-07
中国交通信息化(2019年2期)2019-03-25
导航定位学报(2018年3期)2018-09-03
载人航天(2016年4期)2016-12-01
现代计算机(2016年17期)2016-02-28