
基于参数自整定速度控制器SGCMG框架伺服控制系统*
2013-04-26 05:11田利梅,胡跃伟,马文栋
空间控制技术与应用 2013年4期
单框架控制力矩陀螺(SGCMG)框架转速的控制性能直接影响着控制力矩陀螺整机的输出力矩,是控制力矩陀螺产品最关键的特性之一.影响控制力矩陀螺控制性能的因素包括:力学或温度条件的变化,结构参数及负载特性的变化,各种扰动力矩的干扰等,这些扰动力矩包括:星体转动时产生的低频的扰动力矩,高速转子扰动力矩[1],地面实验过程中,还会有框架角位置改变引起摩擦力矩的变化[2],电机力矩波动[3]及轴承摩擦力矩.
在框架伺服系统控制方法方面,PID控制是较早发展起来的一种基于经典控制理论的控制策略,但传统PID控制策略难以兼顾大转速范围内的高性能动静态控制要求.文献[4]分析了PID控制性能的不足,提出了基于DSP改进的控制方法,这种方法是在系统稳定性和控制精度之间进行折中,牺牲了一定的系统稳定性来保证控制精度.文献[5]给出了抑制低速爬行的方法,阐明了低速爬行和PID控制参数的关系,但单一的参数不能满足不同负载的控制要求.文献[6-8]给出了不同的转速计算方法、扰动力矩和摩擦力矩的补偿算法,这些都是基于传统PID的改进算法,实现了对影响框架伺服系统转速控制的非线性扰动力矩的有效抑制,但仍无法彻底解决单一系统参数不能满足系统的控制要求的矛盾.
模糊控制技术是建立在模糊数学的基础上的,它是针对被控对象的数学模型不明确,或非线性模型的一种工程实用、实现简单的控制方法.在控制力矩陀螺的应用场合,需要电机在全工况下具备良好的速度控制特性.在在线计算能力有限的条件下,基于模糊逻辑的非线性控制方法是电机控制的理想选择之一[9-11].
本文针对使用无刷直流电机的单框架控制力矩陀螺框架伺服系统,设计了基于模糊控制策略及参数自整定控制器的PI控制方法.该方法使控制力矩陀螺框架伺服系统有良好的动、静态性能,且获得了更好的跟踪能力.
1 框架伺服系统及控制策略
1.1 无刷直流电机全桥功率驱动模型
低速框架电机采用无刷直流电机(BLDC, brushless DC motor),驱动采用全桥驱动,采用任一时刻两相导通一相截止,三相六状态的120°导通方式.驱动电路等效模型如图1所示.

图1 无刷直流电机驱动系统等效模型
假定:三相绕组完全对称,气隙磁场为方波,定子电流、转子磁场分布对称;忽略齿槽、换相过程和电枢反应等的影响;电枢绕组在定子内表面均匀连续分布;忽略磁路饱和因素,不计涡流和磁滞损耗.由上述假设,可得电机状态方程
(1)
式中,eA,eB,eC为定子相绕组反电势(V);定子各相绕组电阻相等为R(Ω);定子各相绕组自感相等为L(H);定子相绕组间互感LAB,LAC,LBA,LBC,LCA,LCB为常数M(H),与转子位置无关.
电磁转矩方程
Te=(eAiA+eBiB+eCiC)/ω
(2)
框架伺服系统动力学方程为
(3)
式中,J为框架轴向转动惯量;ω为电机机械角速度;Te为电磁力矩;Tf为扰动力矩;ke为电机力矩系数;i为电机电流.
1.2 框架伺服系统结构
框架伺服系统采用无刷直流电机,并通过谐波减速器来实现间接驱动,如图2所示.

图2 采用转速-电流闭环PI控制的系统结构
系统采用双闭环(速度环、电流环)控制.BLDCM及其驱动系统主要由电机本体、旋转变压器及驱动电路等组成.采用旋转变压器对框架电机转子位置进行采集,进而得到需要的电机转速.利用霍尔信号为逆变器提供相应的换相信号.
PI控制器的本质是一种线性调节器,而对于具有强非线性特性的被控对象,或对于大范围内有高性能的动静态控制要求的被控对象,传统的PI控制难以保证设计性能指标.
2 基于参数自整定速度控制器设计
针对上述分析,本文对转速、电流双闭环系统的传统PI控制进行改进,采用参数自整定模糊控制器来实现速度控制器,通过在线实时修正控制器参数,达到提高控制性能的目的.
2.1 无刷直流电机参数自整定控制器模型
无刷直流电机模糊控制的方法主要可分为标准模糊控制器、模糊PID切换控制器、优化模糊控制器和模糊预补偿控制器几大类[12]. 目前广泛采用二维模糊控制器,它以反馈误差和误差的变化作为输入量,以控制量的变化为输出变量.
本文设计了一种基于模糊推理的参数自整定控制器:利用模糊前馈补偿控制器,根据系统的实际参考输入,对PI控制器的参数进行在线自整定,得到了理想控制器参数,然后通过双闭环控制器对框架伺服系统进行控制.参数自整定控制器原理图如图3所示.
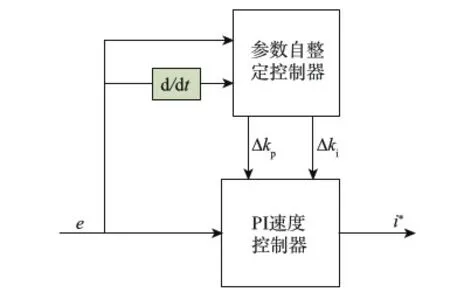
图3 参数自整定控制器原理

ki=ki0+kui×Δki
(4)
kp=kp0+kup×Δkp
(5)
其中kp0,ki0为PI参数初值,kui、kup是比例因子,实现PI参数的自整定功能.
2.2 基于模糊推理的参数自整定控制器设计
输入、输出变量的隶属度函数关系相同,均选用三角隶属函数关系,如图4所示.

图4 隶属度函数关系图
2.3 模糊控制规则与控制机理
基于上述模糊控制规则,采用如下控制机理:
1)参数自整定模糊Pl控制的速度环在外,传统PI控制的电流环在内;
3)电流调节采用传统PI控制方法进行调节.响应速度快,对电压波动起及时抗扰作用;在转速调节过程中(当负载变化时),使电流跟随给定电压变化.
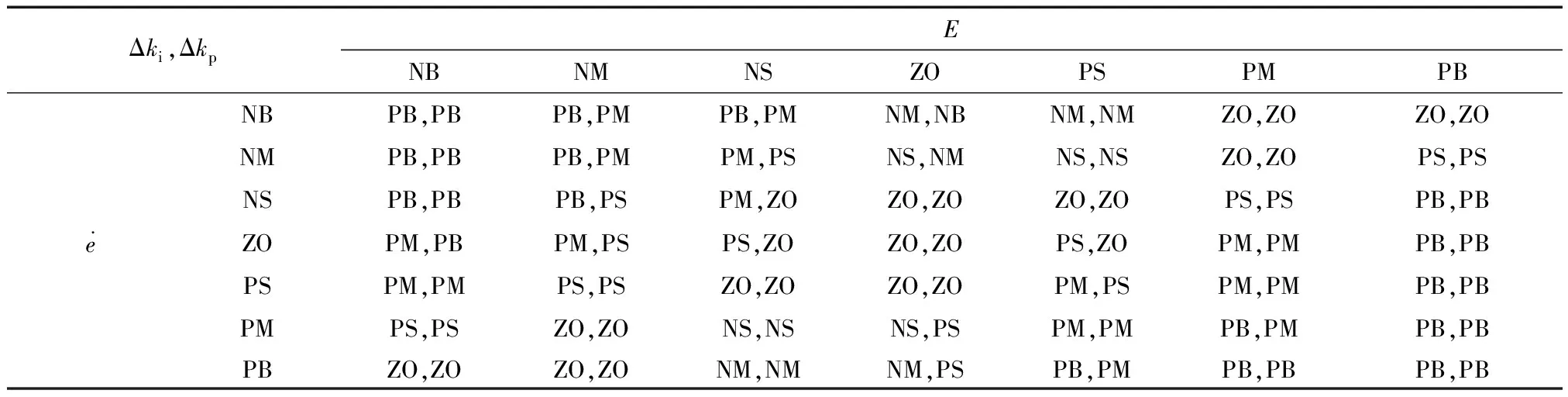
表1 模糊PI规则控制集

图5 模糊PI控制器Δkp、Δki输入输出关系曲面图
3 仿 真
在Matlab/Simulink平台上搭建框架无刷直流电机控制系统,分别对传统PI控制器和本文设计的参数自整定模糊控制行仿真研究.
仿真验证设计原则如下:
1)传统PI控制器的kp,ki与基于模糊规则的参数自整定速度控制器的kp0,ki0选择同一组参数;
2)给定转速验证两种控制器的动态性能,稳态后,改变转速,看两种控制器的跟踪性能;
3)在稳态下突加扰动,比较两种控制器的抗干扰能力及控制的鲁棒性.
仿真参数如表2所示.
仿真试验如下:1)首先给定2(°)/s的转速,在0.2s处改变框架转速,比较两种控制方法的控制效果如图6(a)所示;2)给定2(°)/s的转速,在0.2s处突加0.01N·m的负载扰动比较两种控制方法,结果如图6(b)所示.
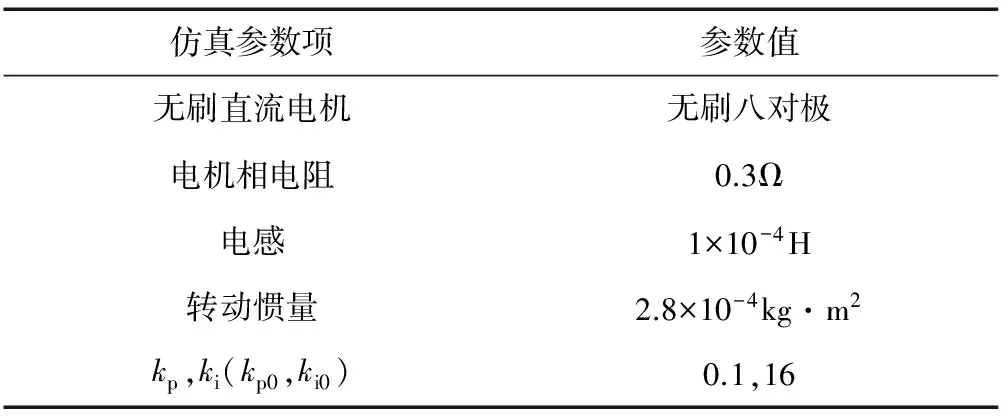
表2 仿真实例参数说明

图6 PI控制与模糊控制转速曲线
从图6中可以看到,基于模糊逻辑的参数自整定速度控制器的控制性能相对于传统PI方法,有一定优势:转速响应速度快,上升时间较短,缩短了约60%,超调减小约20%.转速变化时,跟踪性能好;突加负载扰动时,转速脉动得到了较好抑制.基于模糊逻辑的参数自整定速度控制系统动态性能更好,跟踪性能高,稳定性好,鲁棒性强.
4 结 论
参数自整定速度控制器充分利用了模糊规则少、应用简单灵活、具有自适应能力的优势,用于在线确定控制作用的时间很短,实时性强.针对控制力矩陀螺框架伺服系统PI控制的能力不足的问题,基于模糊PI控制策略的参数自整定速度控制器与传统PI控制相比,有很好的动态性能和稳态性能,跟踪性能高,同时该控制器对框架伺服系统所受扰动有很好的鲁棒性.
参 考 文 献
[1]金磊,徐世杰. SGCMG框架伺服系统动力学建模与低速控制[J]. 中国空间科学技术,2010,30(6):1-10
Jin L, Xu S J. Dynamics modeling and low rate control of gimbal servo system for single gimbal control moment gyro [J]. Chinese Space Science and Technology, 2010,30(6):1-10
[2]王鹏,房建成. MSCMG框架伺服系统非线性摩擦力矩建模与实验研究[J]. 宇航学报,2007,28(3):613-618
Wang P, Fang J C. Nonlinear dynamic modeling and experimental study of friction moment for gimbal servo system used in magnetically suspended control moment gyroscope [J]. Journal of Astronautics, 2007,28(3):613-618
[3]吴忠, 吴宏鑫. SGCMG 框架伺服系统扰动力矩的分析与抑制[J]. 航天控制, 1998,16(4): 9-17
Wu Z, Wu H X. Analysis and attenuation of disturbance torque in SGCMG gimbal servo systems[J] . Aerospace Control, 1998, 16(4): 9-17
[4]黄体笋,魏新生,刘付成,等. 基于DSP的控制力矩陀螺框架数字伺服系统[J].计算机测量与控制,2009,17(2):349-359
Huang T S,Wei X S,Liu F C,et al. Digital servo system for gimbal of control moment gyro based on DSP[J]. Computer Measurement & Control, 2009,17(2):349-359
[5]张锦江,吴宏鑫,李季苏,等. 高精度伺服系统低速问题研究[J].自动化学报,2002,28(3):431-434
Zhang J J, Wu H X, Li J S, et al. On low speed problem of high precision servo system[J]. Acta Automatica Sinica, 2002,28(3):431-434
[6]鲁明,李耀华,张激扬,等. 控制力矩陀螺框架伺服系统的超低速测速方法[J]. 中国惯性技术学报, 2012, 20(2):234-238
Lu M, Li Y H, Zhang J Y, et al. Ultra-low speed detection method for CMG gimbal servo systems[J]. Journal of Chinese Inertial Technology, 2012, 20(2):234-238
[7]张激扬,周大宁,高亚楠. 控制力矩陀螺框架控制方法及框架转速测量方法[J]. 空间控制技术与应用,2008,34(2):23-28
Zhang J Y, Zhou D N, Gao Y N. Gimbal control technique and gimbal rate measurement method for the control moment gyro[J]. Aerospace Control and Application, 2008, 34(2): 23-28
[8]Ming C C, Cang M L. Dynamic control and diagnostic friction estimation for an SPMSM driven satellite reaction wheel[J]. IEEE Transactions on Industrial Electronics, 2011, 58(10): 4693-4707
[9]Chen W, Xia C L. Sensorless control of brushless DC motor based on fuzzy logic[C]. IEEE Proceedings of the World Congress on Intelligent Control and Automation,DaLian, 2006
[10]Xia C L, Xiu J. Sensorless control of switched reluctance motor based on ANFIS[C]. International Conference on Neural Information Processing,HongKong, 2006
[11]Rubaai A, Ricketts D, Kankam M D. Experimental verification of a hybrid fuzzy control strategy for a high-performance brushless DC drive system[J]. IEEE Transactions on Industry Applications, 2001,37(2):503-512
[12]夏长亮.无刷直流电机控制系统[M].北京:科学出版社.
猜你喜欢
大电机技术(2022年5期)2022-11-17
建材发展导向(2022年18期)2022-09-22
汽车实用技术(2022年12期)2022-07-05
北京航空航天大学学报(2022年6期)2022-07-02
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
快乐语文(2018年36期)2018-03-12
电子制作(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
