
人控交会对接九自由度半物理仿真试验系统设计及验证*
2013-04-26 05:11:12石磊,张新邦,万磊等
空间控制技术与应用 2013年4期
人控交会对接依靠航天员观察人控交会对接图像判断追踪航天器与目标航天器在轨的相对运动状态,通过对人控位置手柄和姿态手柄的操作实现对航天器轨道和姿态的精确控制,是一项理论和技术实现上极其复杂的尖端技术.神舟九号飞船人控交会对接控制系统设计完成后,为确保神舟九号飞船与天宫一号目标飞行器首次在轨人控交会对接任务顺利完成,在地面利用半物理仿真试验对人控交会对接控制系统进行大量逼近实际飞行状态的仿真验证十分必要.
本文以人控交会对接半物理仿真试验需求为背景,提出了可对人控交会对接控制系统单机敏感器性能和控制律设计方案进行仿真验证的人控交会对接九自由度半物理仿真试验系统的设计方法,给出了利用该设计方法对神舟九号飞船人控交会对接控制系统的仿真验证结果.
1 人控交会对接半物理仿真系统概况
人控交会对接半物理仿真试验系统按照模拟航天器在轨物理运动过程的途径分为2种:一种利用转台模拟航天器物理运动过程;另一种利用虚拟现实技术模拟航天器物理运动过程.
第一种人控交会对接半物理仿真试验系统可将人控电视摄像机和激光雷达等关键船载测量敏感器通过转台搭载接入仿真回路.转台模拟追踪航天器与目标航天器在轨近距离交会对接物理运动过程中,不仅能够对人控单机敏感器性能进行仿真验证,还可对人控交会对接控制系统进行仿真验证.美国和欧空局等国家和航天组织建立了多种半物理仿真试验系统对人控交会对接技术进行仿真验证,典型应用如美国NASA约翰逊空间中心设计研制的具有12个自由度的航天飞机与空间站实时停靠仿真试验系统[1]和欧空局在德国空间运行中心建立的可用于人控交会对接试验的EPOS靠拢段九自由度半物理仿真试验系统[2-4].
第二种人控交会对接半物理仿真试验系统在数学仿真基础上,利用虚拟现实技术模拟追踪航天器与目标航天器在轨近距离交会对接物理运动过程.此种人控交会对接半物理仿真系统可选择性的将航天员座椅、人控位置手柄、人控姿态手柄和仪表指令系统等与航天员人控操作直接相关的船载部件接入仿真回路,由于缺乏对实际人控交会对接测量、导航、制导与控制完整回路的模拟,多应用于人控交会对接前期方案论证、航天员人控操作培训和人机工效方面的研究[5-8].
本文提出的人控交会对接九自由度半物理仿真试验系统在设计上利用转台模拟追踪航天器与目标航天器在轨近距离交会对接物理运动过程,针对人控交会对接控制系统的单机敏感器性能和控制律设计方案进行仿真验证.
2 人控交会对接九自由度半物理仿真试验系统设计
2.1 系统构成
人控交会对接九自由度半物理仿真试验系统在设计上利用九自由度运动模拟器模拟追踪航天器与目标航天器在轨近距离交会对接的12个自由度物理运动过程.如图1所示,九自由度运动模拟器由三自由度姿态转台(简称三轴转台)和六自由度姿态位置转台(简称六轴转台)构成.三轴转台为1个固定在地面具有3个姿态自由度的立式高精度转台,用于模拟目标航天器在轨三轴绝对姿态运动.六轴转台为1个具有3个姿态自由度和3个位置自由度的立式高精度转台,用于模拟追踪航天器在轨三轴绝对姿态运动和追踪航天器与目标航天器在轨三轴相对位置运动.三轴转台和六轴转台在驱动数据控制下,可连续对追踪航天器与目标航天器在轨近距离交会对接物理运动过程进行逼真模拟.
人控电视摄像机、人控电视摄像机靶标、激光雷达、激光雷达合作目标、人控图像显示器、人控控制计算机、人控位置手柄和姿态手柄作为人控交会对接关键船载部件接入仿真回路,其中人控电视摄像机和激光雷达安装在六轴转台负载面上,人控电视摄像机靶标和激光雷达合作目标安装在三轴转台负载面上.船载常规敏感器、执行机构和航天器轨道、姿态动力学采用数学模型,与转台控制模型共同置于仿真计算机中.激光雷达、人控电视摄像机、人控控制计算机、人控图像显示器、人控位置手柄和姿态手柄之间使用电缆连接,硬件接口、通信协议和时延与人控交会对接控制系统工程设计状态一致.人控控制计算机通过地面接口模拟器与人控指令模拟器、仿真计算机和试验数据服务器相互通信.试验过程中生成的试验数据存储在试验数据服务器中.人控交会对接九自由度半物理仿真试验系统的设备连接关系如图2所示.
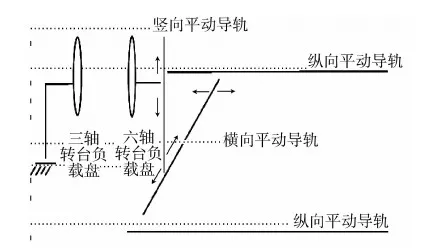
图1 九自由度运动模拟器结构示意图

图2 系统设备连接设计图
2.2 试验原理
人控电视摄像机和激光雷达等船载部件加电进入正常工作状态后,仿真计算机依据试验初始给定的追踪航天器与目标航天器在人控交会对接控制坐标系下的相对状态,解算试验起始时刻三轴转台和六轴转台的初始化数据.三轴转台和六轴转台在仿真计算机同时控制下运动到试验初始化状态过程中,实时将运行状态数据返回仿真计算机,试验人员按照人控交会对接飞行程序操作人控指令模拟器进入人控监视模式.仿真计算机判断三轴转台和六轴转台同时到达试验初始化状态时,启动航天器轨道、姿态动力学模型开始解算,试验人员将人控监视模式切换为人控交会对接模式,试验正式开始.
试验过程中,人控控制计算机在采样周期内分别接收激光雷达对激光雷达合作目标的测量信息,仿真计算机依据动力学解算数据生成的常规敏感器测量信息,试验人员对人控指令模拟器、人控位置手柄和姿态手柄操作产生的人控指令和手柄电压信号,解算人控图像叠加数据和执行机构指令.仿真计算机通过地面接口模拟器接收执行机构指令,解算追踪航天器与目标航天器在轨轨道、姿态动力学变化,生成常规敏感器测量信息和转台驱动数据.常规敏感器测量信息通过地面接口模拟器回传给人控控制计算机.三轴转台和六轴转台在驱动数据驱动下进行连续模拟运动.人控图像显示器接收人控电视摄像机实时拍摄的图像和人控图像叠加数据,合成人控交会对接图像显示在屏幕上.试验人员依据该图像判断三轴转台和六轴转台模拟的追踪航天器与目标航天器在轨近距离交会对接相对运动状态,通过对人控指令模拟器、人控位置手柄和姿态手柄的操作完成人控交会对接半物理仿真试验.
仿真计算机依据动力学解算数据判断追踪航天器对接机构与目标航天器对接机构相互接触时,停止动力学解算,控制三轴转台和六轴转台减速运动直至静止,试验结束.试验数据服务器中存储的试验数据作为对人控交会对接控制系统的单机敏感器性能和控制律设计方案进行评估和验证的依据.
3 关键技术设计
由图2可知,人控交会对接实际工程应用的关键船载部件引入人控交会对接九自由度半物理仿真试验系统仿真回路,保障了仿真系统内测量数据、人控控制解算、人控图像和人控操作与人控交会对接实际工程状态的一致性.执行机构,航天器轨道、姿态动力学和转台控制模型采用数学模型,其对被控航天器被控物理过程模拟的逼真性将决定人控九自由度半物理仿真试验验证结果的真实性和有效性,也是人控交会对接九自由度半物理仿真试验系统在设计上需要解决的关键技术.
3.1 执行机构模型设计
执行机构数学模型包括姿控和轨控2类发动机模型,用于对发动机响应人控控制解算数据进行开启和关闭工作状态的模拟,设计如下:
Fatti(t)=F0atti[I(t)-I(t-T)]
(1)
Fobt(t)=(1+δ)Fobt
(2)
式中,Fatti(t)表示姿控发动机的实际输出,F0atti(t)表示姿控发动机的标称推力,I(·)表示阶跃函数,T为喷气指令脉冲的时间宽度,Fobt(t)表示轨控发动机的实际输出,Fobt表示轨控发动机的标称推力,δ为轨控发动机的推力控制精度.
姿控和轨控发动机模型在以上设计基础上,需考虑发动机开启和关闭延迟的影响.
3.2 航天器轨道姿态动力学模型设计
航天器轨道、姿态动力学模型用于对被控航天器响应执行机构数学模型解算数据在轨飞行状态的模拟解算,设计如下:
(3)
(4)
式(3)中,μ表示地心引力常数,r表示航天器地心矢量,右边第一项为地球中心引力加速度,第二项Fu为航天器执行机构产生的控制力,第三项Fε为其他外部摄动力.式(4)中,Ib为航天器转动惯量阵,ω为航天器在惯性空间下的姿态角速度矢量,Tc为喷气力矩,Td为气动力矩、重力梯度力矩和太阳辐射力矩等.
航天器轨道、姿态动力学模型在以上设计基础上,需考虑帆板对姿态控制的耦合影响.
3.3 转台控制模型设计
转台控制模型用于依据航天器轨道、姿态动力学解算数据,实时解算三轴转台和六轴转台各自绝对控制量,利用三轴转台和六轴转台逼真模拟追踪航天器与目标航天器在轨近距离交会对接的物理运动过程,设计如下:
依据试验工况确定三轴转台3个姿态转角的绝对控制量为φ1、θ1和ψ1,利用人控船载设备的安装标定数据和转台标定数据,计算得到目标航天器动力学坐标系与六轴转台控制坐标系之间的方向余弦阵C01和位置关系A01=[x01,y01,z01]T.
设航天器轨道、姿态动力学解算的目标航天器动力学坐标系与追踪航天器动力学坐标系之间的方向余弦阵为C21,位置关系为A21=[x21,y21,z21]T,则
(5)
A02=A01+C01A21
(6)
由式(5)和式(6),可得到六轴转台的3个姿态转角绝对控制量为C02对应的3个姿态角φ2、θ2和ψ2,3个位置绝对控制量为A02=[x02,y02,z02]T对应的3个位置量.
转台控制模型在以上设计基础上,需考虑六轴转台的位置Y轴和位置Z轴运动范围受限对人控九自由度半物理仿真试验测试覆盖性的影响.
4 仿真验证
神舟九号飞船与天宫一号目标飞行器首次在轨人控交会对接前,利用本文提出的人控交会对接九自由度半物理仿真试验系统设计方法构建了仿真试验环境,对神舟九号飞船人控交会对接控制系统进行了大量试验验证,为神舟九号飞船首次人控交会对接的圆满成功奠定了坚实的基础.图3~6为一组典型工况人控交会对接相对位置、相对速度、相对姿态和相对姿态角速度的仿真验证结果.图7为人控电视摄像机实时图像.

图3 相对位置曲线
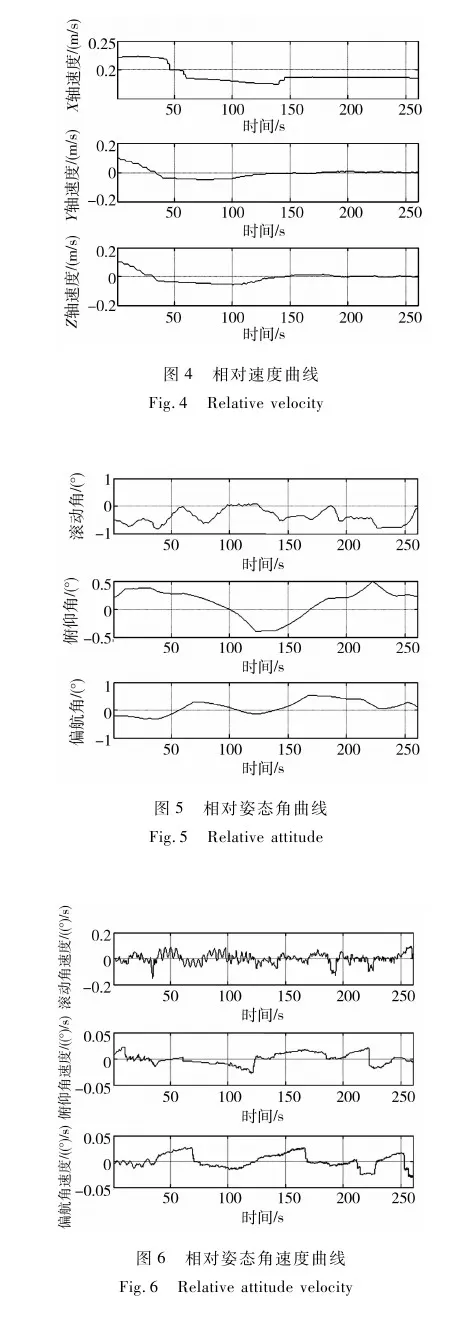

图7 人控电视摄像机图像
5 结 论
人控交会对接九自由度半物理仿真试验系统在设计上利用转台实现对追踪航天器与目标航天器在轨近距离交会对接物理运动的模拟,关键人控船载部件接入仿真回路,常规船载敏感器、执行机构及航天器轨道、姿态动力学采用数学模型,构建了与人控交会对接实际工程状态一致的信息流程.人控交会对接九自由度半物理仿真试验系统的设计方法在神舟九号飞船人控交会对接控制系统仿真验证过程中得到了实际应用和有效验证,工程实践结果表明,系统的设计方法正确.该设计还可应用于人控遥操作等其他人控交会对接领域内的仿真验证,具有广阔的应用前景.
参 考 文 献
[1]王存恩.国外交会对接仿真设备及其应用现状[R].北京:中国空间技术研究院,2001
Wang C N. RVD simulation device abroad and application[R]. Beijing: China Academe of Space Technology, 2001
[2]张锦江,张新邦,李季苏.航天器交会对接仿真试验系统设计和试验研究[C].全国仿真技术学术会议,绵阳,2007
Zhang J J,Zhang X B, Li J S. Design and experiment of spacecraft rendezvous and docking simulation system[C]. National Conference on Simulation Technology, Mianyang, 2007
[3]刘慎钊,张新邦.载人飞船交会对接半物理仿真试验环境研究[J].计算机仿真,2005(增刊1):208-212
Liu S Z, Zhang X B. The environment research for rendezvous and docking hardware in the loop simulation of manned spacecraft [J].Computer Simulation,2005(Sup1):208-212
[4]Boge T, Wimmer T, Ma O, et al. EPOS-using robotics for RVD simulation of on-orbit servicing missions[C]. AIAA Guidance, Navigation, and Control Conference, Toronto, Canada,Aug.2010
[5]林琪,来嘉哲.空间交会对接仿真技术研究[J].装备指挥技术学院学报,2008,19(5):53-57
Lin Q,Lai J Z. Study on simulation technology of rendezvous and docking in space[J]. Journal of the Academy of Equipment Command and Technology,2008,19(5):53-57
[6]任焜,李彬,李志宇. “人在回路”的载人航天器控制系统地面验证平台设计[J].空间控制技术与应用,2010,36(4):50-53
Ren K,Li B,Li Z Y.“Man-in-the-loop”design of verification platform for the manned spacecraft control system[J].Aerospace Control and Application,2010,36(4):50-53
[7]周前祥.载人航天器人—机系统虚拟仿真技术关键问题的探讨[J].科技导报,2003(3):3-5
Zhou Q X. A study on key technology of man-machine system simulation for manned spacecraft[J]. Science and Technology Review,2003(3):3-5
[8]蒋自成,周建平,唐国金.基于立体场景的人控交会对接仿真研究[J].系统仿真学报,2008,20(9):2398-2401
Jiang Z C,Zhou J P,Tang G J. Study on manual control rendezvous and docking simulation based on stereo scene[J]. Journal of System Simulation, 2008,20(9):2398-2401
猜你喜欢
纺织科学研究(2023年9期)2023-10-23 11:18:06
小哥白尼(趣味科学)(2021年6期)2021-11-02 05:23:48
故事作文·高年级(2021年4期)2021-05-06 03:20:04
小哥白尼(神奇星球)(2021年11期)2021-03-08 09:00:18
装备制造技术(2020年11期)2021-01-26 00:39:30
当代水产(2019年1期)2019-05-16 02:41:10
电子制作(2018年11期)2018-08-04 03:25:44
太空探索(2016年9期)2016-07-12 09:59:53
科普童话·百科探秘(2015年5期)2015-05-26 07:10:33
小朋友·快乐手工(2015年3期)2015-04-10 00:26:12
