舰载机甲板布列调运优化方法研究*
2013-04-23 09:28李耀宇朱一凡
指挥控制与仿真 2013年2期
李耀宇,朱一凡,齐 鸣,李 群
(1.国防科技大学信息系统与管理学院,湖南 长沙 410073;2.海军装备研究院舰船所,北京 100073)
航空母舰自诞生以来就在战场上显示了强大的性能和作用,从某种意义上说,航母已经成为一个国家科技水平、工业水平甚至综合国力的象征[1]。航母强大的战斗力来自舰载机等装备的科技水平以及航母指挥员的管理和调度能力。航母甲板空间有限,作战环境高度危险紧张,如果能够在任务下达后最先出动战机形成战斗力并且在作战过程中有条不紊地进行甲板作业,保持持久作战能力,就能在瞬息万变的战场中占据先机。作为航空母舰作战的核心问题,舰载机的起飞、降落、停泊、维护等很多工作都要在飞行甲板上完成,有时还需要调动下层甲板中机库里的飞机进行作战。如何合理利用飞行甲板有限的空间和资源,快速有效地调度飞机执行作战任务,是世界各航母强国争先研究的关键问题[2]。
美国拥有世界上最强大的航母力量,经过70多年的实战经验积累,已经形成一套行之有效的舰载机布列调运体系和制度。由于舰载机的甲板调度一直被各军事强国列为航母的关键技术,几乎没有任何文献或资料介绍航母指挥官如何调度和管理舰载机,所以这项技能也被称为“巫术”。尽管航母的布列调运一直笼罩着神秘的面纱,但是从最近的一些文献中可以发现[3-4],所谓舰载机布列调运,实质上就是为舰载机安排合理的停机位,方便其出动或进行各项维修补给作业,并实时规划舰载机移动路径,在避免碰撞等事故的前提下,尽量缩短移动距离、减少作业时间,为舰载机的起降及各项作业做好准备[5-50]。
最早用计算机辅助舰载机调度的是Giardina[44]和Johnson[45]等人,1974年他们设计了最早的航母甲板操作控制系统(CADOCS),但没有得到充分的应用。2002年Timothy[2]提出了美军航母布列调运智能化的需求,但其只停留在概念设计层面上。Jeffrey[43]等人设计了一种航母舰载机甲板持续监控系统,具备舰载机调度过程中的危险预警和路径规划的能力,但不具备舰载机的调度辅助功能。国内的冯强[13]将Multi-Agent技术应用到舰载机的甲板作业,设计了基于MAS的舰载机动态调度模型,但由于只针对舰载机各甲板作业之间的协调,对布列调运的优化作用不大。
2009年,MIT的计算机科学与人工智能实验室(ComputerScience and ArtificialIntelligence Lab,CSAIL)开始为美海军自动项目研究所开发一款名为航空母舰甲板行动过程规划者(Aircraft Carrier Deck Course of Action Planner,DCAP)的系统,其规划手段基于马尔可夫决策过程和学徒强化学习方法,旨在为航母甲板指控人员提供舰载机的作业流程和调度辅助方案。目前该系统已经进入指挥人员的测试过程,不久将会在美航母舰队上得到应用。
综合上述研究可以发现,布列调运优化主要包括舰载机在甲板的停放布局、甲板移动过程的路径规划以及甲板作业的调度。本文将这三个舰载机布列调运的关键环节作为研究内容,首先介绍美军航母舰载机布列调运的现行管理体系和方法,指出人工调度的缺陷和不足,然后针对舰载机甲板停放布列、移动路径规划和甲板作业调度的特点介绍目前这几个方面的主要研究方法,最后展望了舰载机布列调运优化方法未来的研究方向。
1 航母舰载机布列调运现状分析
1.1 航母布列调运组织制度
以美军为例,航空母舰上负责管理飞行甲板布列调运的职位为飞机调运长官(ACHO,Aircraft Handling Officer),其职责是在飞行准备期和飞行作战过程中调度飞机在甲板和机库的布列停放和移动调度,避免因有限空间内飞机太多而造成“死锁”。其详细职责包括:
·监督管理编队飞机的维护保养,确保飞机在飞行甲板和机库的停放位置和方式能够快速完成下两次的飞行出动任务;
·时刻了解飞机状况并报告变更情况;
·时刻追踪空中的、飞行甲板上的和机库里的飞机数量,飞行甲板和机库中的武器种类和数量,以及甲板上其他设备可用情况(如燃油泵等)。
ACHO通过飞行甲板长官、机库长官、弹射器长官等的辅助,实时控制所有飞机的布列状态,根据任务需要,调度飞机进行维修保养、入库或二次飞行出动,并为所有飞机在甲板和机库的移动规划路线,确保飞机能够在最短的时间内完成飞行准备任务。
1.2 “Oui ja”Board与ADMACS
多年来ACHO一直使用一种称为“占卜板(Oui ja Board)”[6]的航母甲板模拟平台记录并管理舰载机的停放和调度,它有上下两层,分别代表飞行甲板和机库甲板,并用各种颜色、形状的飞机模型和图钉的组合来代表甲板上当前各飞机的停放位置和状态,如图1所示。

图1 “Oui ja”Board
“占卜板”既可以用来代表实际飞机的位置,也可用于规划飞机的调度。飞机的位置和状态信息由地面工作人员通过话筒报告给ACHO,所以“占卜板”上显示的仅仅是甲板当前的静态布局。一般情况下,一艘航母只有一台“占卜板”,也就是说,只有ACHO和他的部门人员了解航母的布列状态,如果航母司令官想知道当前的甲板情况部署战斗任务,只能向ACHO咨询或者亲自到布列调运指挥室了解。显而易见,这种人工的操作方式不仅存在信息延误和不对称的情况,不利于舰载机布列调运的快速指挥,而且严重影响航空母舰的整体作战能力。
为了解决“占卜板”信息不对称的问题,美国海军开发了航空数据管理与控制系统(Aviation Data Management And Control System,ADMACS)和舰船综合信息系统(Integrated Shipboard Information System,ISIS),这是第一次尝试在美海军舰船上建立整体数据库和分布式数据共享的系统,用来管理舰载机的飞行与航母甲板的布列调运。
目前ADMACS已升级至3.0版本。如图2所示,前两个版本通过在舰载机上安装具有标识的GPS,提供实时显示位置状态信息和数据共享的功能以及记录飞机的起降操作,但由于没有智能规划和调度的能力,也经常被称为“数字化的占卜板”。为弥补这项不足,3.0版本增加了舰载机辅助定位和移动路径规划功能,将一些复杂的排列和计算工作交给计算机完成,为航母的调运指挥官提供布列调运的意见和方案,2010年“林肯”号航空母舰已全面安装该版本系统。由此可见,航母甲板调度指挥方式向智能自动化过渡,已成为不可阻挡的发展趋势。
2 舰载机甲板停放布列
2.1 舰载机甲板停放布列的特点
航母的作战能力主要取决于其搭载的舰载机,以尼米兹级航空母舰为例,其飞行甲板停放的舰载机一般在45~50架左右,占舰载机总数的60%以上。飞行甲板能停放飞机的最大数量决定了一次放飞和回收飞机数量的上限,也就决定了一个攻击波次最多能够出动飞机的数量。

图2 ADMACS
通常,飞行甲板停放飞机有以下特点:
1)停放飞机的机种应能满足攻击波次出动飞机的需要,也就是说,停放飞机的机种是有一定搭配要求的;
2)停放在飞行甲板上待飞的飞机一般只需要作一些常规的检测和后勤保障,通常它们是可以随时执行任务的;
3)停放在飞行甲板上的飞机既不能影响机群的起飞,又不能影响机群的降落,因而舰载机的停放布列需要有适合于机群起飞或机群降落的几种不同的方案。
舰载机在飞行甲板和机库的停放布列研究,目的是针对不同的任务需求,充分利用甲板空间,在尽可能多停放舰载机的情况下,使舰载机的出动能力(速度和数量)达到最优。
2.2 舰载机甲板停放布列优化方法
2.2.1 空间利用率优化方法
空间利用率优化问题也称装箱问题(Bin Packing,BP),属于一种 NP难度问题[7-8]。按空间性质可以划分为三维BP问题和二维BP问题,按装载物的形状特性又可以划分为规则体的BP问题和不规则体的BP问题[9]。由于舰载机在飞行甲板的停放布列采用平面的方式,所以可以划分为一类特殊二维不规则体的BP问题。
目前二维不规则物体的空间利用率方法有很多,但没有在舰载机布列问题上得到应用。Ugur对比了多种二维BP算法,并详细分析了影响这些算法效果的参数[17]。Epstein用图形着色方法研究带冲突的二维正方形BP问题,计算速度快,但应用范围很难扩展[18]。Ping Chen分别采用禁忌搜索、遗传算法和贪婪法研究二维不规则形状的BP问题,详细给出了求解过程,并列出了贪婪法的实验结果[19]。Hirokazu用模拟退火方法研究工业制造领域中的三维模块BP问题,并提出一种扩展的边界切割网格方法(Bounded-Sliceline Grid)作为新的拓扑结构编码方式[20]。Vincent Y等人采用启发式顺序遗传算法研究三维BP问题,避免了冲突检测过程,提高了计算效率[21]。Gyorgy研究了带拒绝惩罚的BP问题,其目标是使所用容器数量与被拒绝装载物惩罚值的乘积最小,此外他还分别设计了适用于在线和离线的BP算法[22]。Correa随后进一步优化了在线离线 BP算法,并考虑了可变容积的 BP问题[23]。Stefan考虑装填物体是否可旋转而用相应的矩形代替原不规则物体[10]。
综合上述研究,对于像舰载机这样的复杂不规则物体,目前的一般做法是将原物体简化(如矩形),建立其数学、仿真模型提出的算法进行布置,然后结果中的简化物体还原为实际物体,最后通过实验验证。
2.2.2 空间布局设计方法
空间布局设计(Layout Design)主要面向物流仓储领域中的订单拣货问题(Order Picking),即设计一种仓储空间布局模型,使拣货的成本最优化。也可称作内部布局设计或巷道结构问题,涉及存储区块数量的确定,每个拣货区中巷道数量、长度和宽度的确定,如图3所示,目的就是在给定的约束条件和需求情况下,关于某个确定的目标函数,找到一个最好的仓储布局,一般其目标函数就是行走距离[23]。

图3 订单拣货仓储的布局设计
关于空间布局设计的文献并不丰富。1980年Bassan研究了不同的平行通道布局以及路径对综合成本的影响[24]。Rosenblatt利用分析和仿真方法研究内部存储策略对拣货成本的影响[25],随后他又检验了随机需求对布局和存储容量的影响[26]。Petersen提出了一个非线性目标函数,用来确定随机存储仓库内使平均拣货距离最小的通道结构[27]。Roodbergen同样把最小化平均路径长度作为主要目标,通过仿真,针对随机存储策略和基于周转率的储位分配策略,研究了巷道的长度和数量对总行走时间的影响[28]。Carom F在基于体积指标的存储分配策略下考虑了一个具有中间横道的两个区的仓库 ,而Tho Le则主要关注分类存储策略[30]。Kevin对人们一直用平行通道设计仓库布局这一传统提出了质疑,研究了用斜线通道布局结构优化订单拣货系统[31]。
2.3 小结
舰载机的停放布列设计与仓库的空间布局设计有些相似,其目的都是通过对空间布局的设计,获得对期望目标(出动时间和搬运成本)的优化,但二者之间又存在很大的区别。
首先,航母甲板的空间环境比仓库要复杂得多,要考虑的因素更多,必须按照一定的规则在某些指定的停机位停放。其次,飞行甲板和机库甲板空间相对与一般的仓库比较狭小,灵活性、安全性等方面的要求却比仓库严格很多。在停放数量和移动通道的取舍方面,必须做出合理的分配,要求在紧急情况时能够快速出动的条件下,尽可能多停放飞机。第三,航母甲板的空间比较难划分,且一般存在多种用途(如尼米兹级航母的前跑道在非紧急情况下经常停放大量的舰载机,而且飞机之间不留通道);仓库则一般采用规则的布局方式,需要考虑的因素相对较少。
虽然舰载机的停放布列设计与仓库的空间布局设计有许多的不同之处,但二者在本质上属于同一种空间布局问题,只要将航母甲板的空间环境分析清楚,确定各种约束条件,建立合适的空间布局模型,再经过多次的仿真实验和改进,可以达到对舰载机停放布列的优化研究目的。
3 舰载机甲板移动路径规划
3.1 舰载机甲板移动路径规划特点
舰载机的甲板移动路径规划是指舰载机遵循某些规则,采用滑行或牵引的方式,从甲板上的一个地方到另一个地方的路径规划过程,属于二维空间的线性移动问题。航母甲板空间相对比较狭小、设备复杂、人员众多,舰载机的调动过程除了要求尽量缩短路径外,更需要避免相互碰撞并确保人员安全。
目前的舰载机在甲板的移动过程一般采用人工指挥的方式,由甲板操作人员指挥舰载机或牵引车进行移动。这种方式不仅效率低,而且由于指挥员视线阻挡等问题,经常造成飞机的刮擦碰撞甚至人员的伤亡。美军为减少舰载机甲板操作中的事故发生,应用了一种持续监控系统(Persistent Monitoring System)[6]。该系统结合了舰载机GPS定位、甲板移动路径规划、碰撞事故检测与报警等功能,为提高舰载机甲板作业效率和减少事故发生起到了一定的积极作用。
由于航母甲板环境的特殊性,特别是作战时的高度动态和不确定性,舰载机在甲板的移动路径问题属于局部环境已知,但移动过程中的变量、条件不确定的实时路径优化问题,该问题包括空间环境的判断和建模、碰撞检测和路径规划算法的选择等方面。
3.2 移动路径规划研究方法
国内外对路径规划方法进行过大量的研究,主要包括:人工势场法、模糊逻辑算法、智能计算方法、路标法以及基于伪谱法的最优控制方法等。
人工势场法最先由Khatib于20世纪80年代中期提出,它不需要利用图形的形式表示规划空间,而是将物体的运动看成是两种力作用的结果[32]。其运动轨迹就是最终要找的路线,该方法规划速度快,但可能找不到路径。
模糊逻辑算法[33]基于实时传感信息,参考人的驾驶经验,通过查表得到规划信息,实现局部路径规划。该方法克服了人工势场法易产生的局部极值问题,适用于时变未知环境下的路径规划,实时性较好。
智能计算方法主要包括神经网络算法、蚁群算法、进化算法和粒子群算法等。神经网络是在生物功能启示下建立起来的一种计算方法,Hopfield利用神经网络成功解决旅行商问题,其缺点是计算量太大[34]。蚁群算法模拟蚁群的行为寻找优化路径[35],具有很强的发现较好解的能力,不容易陷入局部最优,但搜索时间较长。进化计算[36]和粒子群算法[37]具有较强的鲁棒性,对于无法用数学模型精确描述或参数事先无法知道的情况也有较好的应用效果,但问题规模过大时经常导致算法收敛速度过慢或者得到的解不准确,此外还需要调整许多参数。
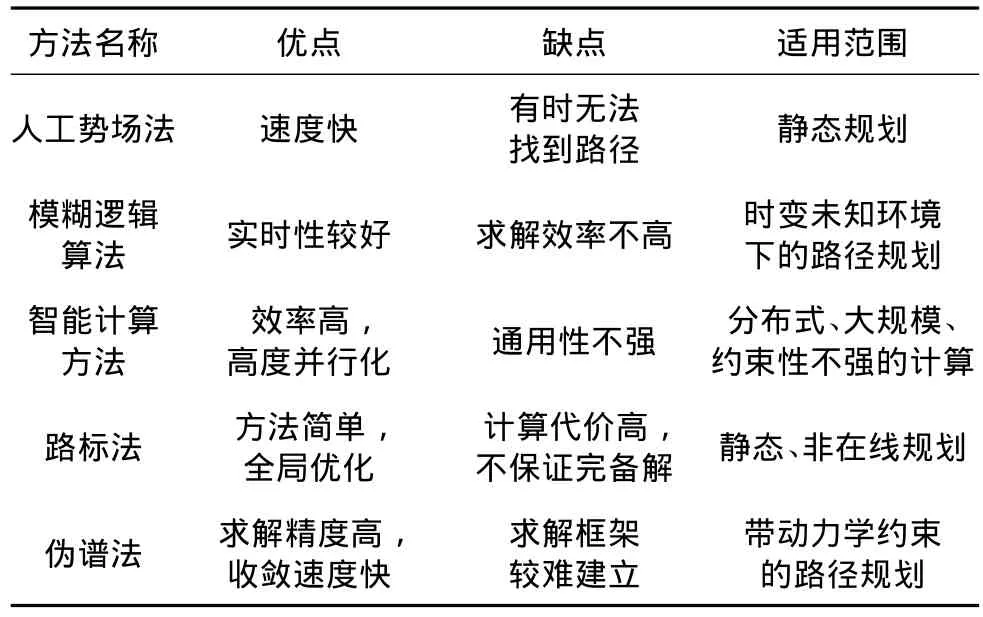
表1 各种方法的对比
路标法(Roadmap)通过建立不与障碍碰撞的全局子目标,再用局部规划方法搜索[38]。这种方法计算代价较高,而且不保证具备完备解,适用于静态环境而不适合在线规划。
基于伪谱法的最优控制方法解决路径规划问题是近几年发展起来的一种新的优化方法,优点是求解精度高、收敛速度快。常见的伪谱法包括:Chebyshev伪谱法(CPM)、Legendre伪谱法(LPM)、Radau伪谱法(RPM)和Gauss伪谱法(GPM),Huntington对比了上述几种方法,证明了GPM具备较高的精度和收敛速度,而且在处理初始终端约束方面具有一定的优势[39]。Ross等人开发了基于伪谱法的Matlab插件DIDO[40-42],并将其应用在了舰载机甲板移动问题上,如图4所示。

图4 基于DIDO的舰载机甲板移动路径规划仿真应用
3.3 小结
舰载机在甲板的移动路径规划是路径规划领域的新问题,主要难点在于飞行甲板环境复杂,舰载机移动需要根据环境动态变化。此外,甲板空间的构造,舰载机和牵引车的运动学特性,以及人员活动和各种资源的约束都是解决这一问题必须考虑的内容。
4 舰载机甲板作业调度优化
航母舰载机的甲板作业调度是指在有限的时间、空间和资源约束条件下,以提高飞机的起降能力和保障作战效果为目标,对舰载机的甲板操作流程或者行动过程进行优化,是航空母舰布列调运乃至作战指挥的关键问题。它涉及多架舰载机在多种资源之间的协调、驻留、起降以及维修保障等甲板作业,属于运筹学中的动态调度问题。目前常用的动态调度方法包括:最优化方法、启发式方法、仿真方法、神经网络方法、智能搜索方法以及Multi-Agent方法。
最优化方法主要包括数学规划(动态规划、混合整数线型规划等)、分支定界法和削去法等。这类方法通常基于某些简化的假设,进而产生一个最优化调度方案。但这类方法大多基于某些理想化的假设,不能充分表达航母甲板复杂环境的随机性和动态性,所以单独使用这类方法解决动态调度方法是不现实的[46]。
启发式方法并不企图在多项式时间内求得问题的最优解,而是在计算时间和调度效果之间进行折中,以较小的计算量来得到满意结果[47]。但由于它通常仅对一个目标提供可行解,并且缺乏对整体性能的有效把握和预见,所以在实际应用中常将它与其他方法结合使用。
仿真方法是动态调度研究中最常用的方法。该方法通过建模对实际调度环境进行模拟[48],从而避开了对调度问题进行理论分析的困难。在缺乏有效的理论分析的情况下,仿真是一种比较好的方法。
神经网络方法和职能搜索方法是研究动态调度问题常用的方法,研究中应用最多的是BP网[49]、模拟退火、禁忌搜索和遗传算法等[50],由于这些方法具有计算速度快且易与其它算法相结合的优点,非常适合于解决动态调度问题。
Multi-Agent方法特别适用于解决复杂问题,尤其是那些经典方法无法解决的单元间有大量交互作用的问题[51]。其优点是速度快、可靠性高、可扩展性强、能处理带有空间分布的问题、对不确定性数据和知识有较好的容错性。
目前关于舰载机的调度问题研究主要偏向如何使跑道利用率最高或者飞机着陆时间最短等问题[11-12],与航母舰载机作业这种需要实时、自适应并且多阶段的动态调度还有一定距离。针对这一问题,MIT的Ryan等人[14-16]通过参与DCAP的开发,研究基于Markov决策过程的舰载机甲板作业行动过程优化(如图5所示)。他们根据航母甲板特点,将各舰载机、弹射器、阻拦装置状态细分,建立Markov状态转移模型,最后采用反向强化学习(或称为学徒学习)方法获取行动过程优化方案。冯强[13]应用多Agent技术分析建立了舰载机动态调度模型,研究其协同机制和调度算法并进行了仿真验证。
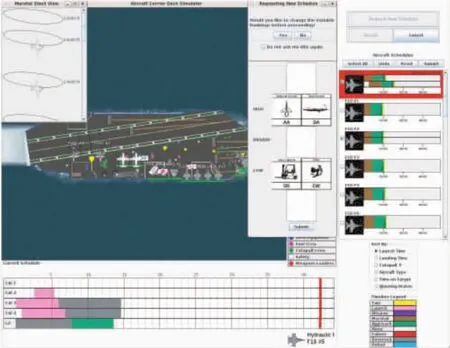
图5 DCAP
5 结束语
本文在分析美军现代航空母舰布列调运管理方式和发展趋势的基础上,将空间布局、路径规划以及甲板作业调度作为研究舰载机布列调运优化的主要途径,总结了目前国内外对这三方面研究的情况。由于美军航母极具代表性,本文并未介绍其他国家航母的布列调运情况。对于我国正在进行的航母发展事业,应从美航母的作战应用中汲取经验,在舰载机的布列调运优化方面,可进一步开展以下研究:
1)提高停放布列和路径规划的智能化程度
利用空间布局和路径规划技术,结合数据处理能力,由计算机快速为舰载机指定停放位,减少人工规划造成的重定位问题;根据舰载机的环境信息,实时规划调运路径,缩短移动时间,避免碰撞等事故的发生。
2)提高甲板作业的动态调度能力
航母的甲板作业涉及多舰载机与多资源之间的协调,包括起降、停放、调运以及维护保障等多种作业。运用多种动态调度方法优化甲板作业和行动过程,将对提高航母的作战能力起到重要的作用。
[1]孙诗南.现代航空母舰[M].上海:上海科学普及出版社,1998.
[2]Timothy Thate.Requirements for Digitized Aircraft Spotting(OUIJA)Board for Use on U.S.Navy Aircraft Carriers[D].Naval Postgraduate School,2002.
[3]Navair 00-80T-105,CV Natops Manual.Department of the Navy Chief of Naval Operations 2000,Navy Pentagon Washington[S].D.C.20350-2000.
[4]Commander,Naval Air Systems Command.“CV Flight/Hangar Deck NATOPS Manual”[S].2005.NAVAIR 00-80T-120.
[5]李正国.美海军航母战斗群战术[M].北京:空军指挥学院,2005.
[6]Jeffrey S.Johnston.A Feasibility Study of a Persistent Monitoring System for the Flight Deck of U.S.Navy Aircraft Carriers[D].DEPARTMENT OF THE AIR FORCE AIR UNIVERSITY,2009.
[7]Dowsland KA,Dowsland W B.Packing problems Journal of Operational Research[J].1992,56:2-14.
[8]Garey M R and Johnson D S.Computer and Intractability:A Guide to the Theory of NP-Completeness[J].New York,1979.
[9]王彩红.分布式环境下人机协同的智能布置设计理论与方法的研究[D].北京:北京交通大学,2007.
[10]Stefan Jakobs.Theory and Methodology on genetic algorithms polygons[J].European Journal of Operational Research,1996:88.
[11]Irene Moser.Solving Dynamic Single-Runway Aircraft Landing Problems With Extremal Optimisation[C].Proceedings of the 2007 IEEE Symposium on Computational Intelligence in Scheduling,2007.
[12]张洪海.多跑道着陆飞机协同调度多目标优化[J].西南交通大学学报,2009,44(3):6-7.
[13]冯强.基于MAS的舰载机动态调度模型研究[J],航空学报,2009(9):6-11.
[14]Jason C.Ryana.Designing an Interactive Local and Global Decision Support System for Aircraft Carrier Deck Scheduling[C].AIAA,2011.
[15]Bernard Michini.A Human-Interactive Course of Action Planner forAircraftCarrierDeck Operations[C].AIAA,2011.
[16]Rajarshi Ghosh Dastidar.A Queueing Network Based Approach to Distributed Aircraft Carrier Deck Scheduling[C].AIAA:2011-1514.
[17]Ugur Dogrusoz.Two-dimensional Packing Algorithms for Layout of Disconnected Graphs[J].Information Sciences,143(2002):147-158.
[18]Leah Epstein,Asaf Levin.Two-dimensional packing with conflicts[C].Acta Informatica(2008)45:155-175 DOI 10.1007/s00236-007.
[19]Ping Chen,Zhaohui Fu.Two-Dimensional Packing For Irregular Shaped Objects[C].Proceedings of the 36th Hawaii International Conference on System Sciences(HICSS'03)0-7695-1874-5/0.
[20]Hirokazu Yamagishi.Three Dimensional Module Packing by Simulated Annealing[J].0-7803-9363-5/05 IEEE.
[21]Vincent Y.Blouin.Three-Dimensional Packing by a Heuristic-based Sequential Genetic Algorithm[C].11th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference 6-8 September 2006,Portsmouth,Virginia.
[22]Gyorgy Dosa.Bin Packing Problems with Rejection Penalties and Their Dual Problems[J].Information and Computation,204(2006):795-815.
[23]Correa.Bin Packing with Controllable Item Sizes[J].Information and Computation,206(2008):1003-1016.
[24]Bassan,Y.,Roll,Y.,Rosenblatt,M.J.Internal layout design of a warehouse[J].IIE Transactions,1980,12(4):317-322.
[25]Rosenblatt,M.J.and Roll,Warehouse design with storage policy considerations[J].International Journal of Production Research,1984,22(5):809-821.
[26]Rosenblatt,M.J.and Roll,Y.Warehouse capacity in a stochastic environment[J].International Journal of Production Research,1988,26(12):1847-1851.
[27]Petersen,C.G.Considerations in order picking zone configuration[J].InternationalJournalofOperations&Production Management,2002,27(7):793-805.
[28]Roodbergen,K.J.Layout and routing methods for warehouses[D].Erasmus Research Institute of Management(ERIM),2001.
[29]Carom F.,Marchet,G and Perego,A.Optimal layout in low-level picker-to-part systems[J],International Journal of Production Research,2000,38(1):101-117.
[30]Tho Le-Due,Design and control of efficient order picking processes[D],Erasmus University Rotterdam,2005.
[31]KEVIN R.GUE,Aisle configurations for unit-load warehouses[J],IIE Transactions(2009)41,171-182
[32]Khatib,O,Real-time obstacle avoidance for manipulators and mobile robots,The International Journal Robotics Research[J],5(1):90-98,1986.
[33]Nelson,H.C.,Ye,Y C.,An intelligent mobile vehicle navigator based on fuzzy logic and reinforcement learning[J],IEEE Trans.on Systems,Man and Cybernetics,Part B:Cybernetics,29(2):314-321,1999.
[34]Lu W C,Mora-Camino F,Achaibou K.A flatness based flight guidance control using neural networka[C]//IEEE the 24th DigitalAvionics Systems Conference,2005.
[35]V Nauyen H,V Ngo A,L SeungGwan,et al.Obstacle A-voidance Path Planning for Mobile Robot Based on Multi Colony Ant Algorithm[C].First International Conference on Advances in Computer-Human Interaction,2008.
[36]Nikolos I K,Valavanis K P.Evolutionary algorithm based offline/online path planner for OAV navigation[J].IEEE Transactions on Systems,Man,and Cybernetics,2003,33(6):898-912.
[37]Foo J L,Knutzon J,Kalivarapu V,et al.Path planning of unmanned aerial vehicles using E-splines and particle swarm optimization[J].Journal of Aerospace Computing,Information,and Communication,2009(6):271-290.
[38]Kavraki,L.E.,5vestka,P.,Latombe,J.C.and Overmars,M.H.,Probabilistic roadmaps for path planning in high-dimensional configuration spaces[J],IEEE Trcans.on Robotics and Automation,12(4):566-580,1996.
[39]Huntington G T,Benson D,Rao A V.A comparison of accuracy and computational efficiency of three pseudospectral methods[R].AIAA-2007-6405,2007.
[40]Ross,I.M.User's Manual for DIDO:A MATLAB Application Package for Solving Optimal Control Problems[R].Elissar,Monterey,CA,2007.Document TR 705.
[41]L.Ryan Lewis,I.Michael Ross.Pseudospectral Motion Planning Techniques for Autonomous Obstacle[J].Proceedings of the 46th IEEE Conference on Decision and Control New Orleans,LA,USA,Dec.12-14,2007.
[42]Michael A.Hurni,Pooya Sekhavat,Mark Karpenko,and I.Michael Ross.Autonomous Multi-Vehicle Formations Using A Pseuodospectral Optimal Control Framework[C].2010 IEEE/ASME International Conference on Advanced IntelligentMechatronicsMontreal, Canada, July 6-9,2010.
[43]Jeffrey S.Feasibility Study of Global-Positioning-System-Based Aircraft-Carrier Flight-Deck Persistent Monitoring System[C].JOURNAL OF AIRCRAFT Vol.47,No.5,September—October 2010.
[44]Giardina,Thomas J.An Interactive Graphics Approach to the Flight Deck Handling Problem.Master's thesis[R],Naval Postgraduate School,1974.
[45]Johnson,Alan K.and Kriston P.Woolley.A Simulation of a Computer Graphics-Aided Aircraft Handling System[R].Master's thesis,Naval Postgraduate School,1975.
[46]Matsuura H,Tsubone H,Kanezashi M.Sequencing,dispatching and switching in dynamic manufacturing environment[J].Int J of Prod Res,1993,31(7):1671-1688.
[47]Johnson S M.Optimal two and three-stage production schedules with setup times included[J].Naval Res Log Quart,1954,1(1):61-8.
[48]Liu H J,artificial Dong Jian.Dispatching rule selection using neural scheduling[J]networks for dynamic planning and J of Intel Manuf,1996,7(2):243-50.
[49]Sim S K,Yeo K T,Lee W H.An expert neural network system for dynamic job shop scheduling[J].Int J of Prod Res,1994,32(8):1759-1773.
[50]Lee C Y,Piramuthu S,Tsai Y K.Job shop scheduling with a genetic algorithm and machine learning[J].Int J of Prod Res,1997,35(4):1171-1191.
[51]钱晓龙,唐立新,刘文新,动态调度的研究方法综述[J].控制与决策,2001,16(2):3-5.
猜你喜欢
中国舰船研究(2021年3期)2021-06-08
兽医导刊(2020年10期)2020-12-30
船舶标准化工程师(2020年1期)2020-06-12
船舶标准化工程师(2020年1期)2020-06-12
少年漫画(艺术创想)(2018年5期)2018-09-11
军事运筹与系统工程(2017年4期)2017-08-29
作文周刊·小学六年级版(2017年25期)2017-08-14
指挥控制与仿真(2017年2期)2017-05-11
国防(2017年12期)2017-04-09
环球人物(2014年22期)2014-09-10