基于融合检测概率的雷达网威力范围算法研究*
2013-04-23 09:27李修和
指挥控制与仿真 2013年2期
沈 阳,李修和,薛 磊
(解放军电子工程学院,安徽 合肥 230037)
雷达威力范围即雷达系统对目标检测的性能满足一定条件的空间范围,理想条件下是一个圆锥体,它是衡量雷达系统性能的一个重要指标[1-2]。雷达网的威力范围分析可以为雷达网优化布站和系统设计提供重要依据,文献[3]给出了雷达网威力范围的区域求并计算方法。该方法虽然简单但是没有考虑雷达网融合检测对威力范围的贡献。本文从雷达威力范围与检测性能关系出发,分析建立了雷达网威力范围计算模型。相对于单雷达威力范围求并的传统方法而言,本文方法能够精确计算雷达网威力范围,为雷达网威力分析和优化布站提供了重要依据。
1 雷达威力范围分析
所谓威力范围,是指雷达每次搜索都能以不低于给定的概率在其中发现给定有效截面积的雷达目标的空域范围,一般给定概率有0.5(警戒)和0.9(引导)两种[3]。雷达威力范围可以表示成满足式(1)要求的点集。

式中,S为雷达威力范围;si为威力范围内某一点;N为空间点数;Pd(si)为空间si处的雷达检测概率;Pd0为给定的检测概率,一般警戒取0.5,引导取0.9。
雷达对目标的检测概率与信噪比的关系如下[4]:

式中,n为一次扫描中雷达的脉冲积累数,有

其中,Δθα是雷达水平波瓣宽度(°),ω是雷达天线扫描角速度(°/s),fr是雷达脉冲重复频率(Hz)。
SN为信噪比,表达式如下:

式中,Pt为雷达发射功率;Gt为雷达天线增益;λ为雷达工作波长;K为波尔兹曼常数,取1.38×10-23W·s/(°);T0为以绝对温度表示的接收机噪声温度,取290K;Fn为噪声系数;L为系统损耗因子;σ为雷达反射截面积;Δfr为接收机带宽;Rtr为雷达到目标的距离。
由式(4)可得:若已知给定概率Pd0时,雷达探测距离为R0,则其他距离R上的检测概率Pd与它们的关系如式(5)所示:
通常情况下,雷达的警戒威力范围边界按给定概率Pd0=0.5给出,即给出了探测距离R0,则可以计算其他距离R上的检测概率Pd。
通常单部雷达的探测范围的外包络线是按照检测概率为0.5时的值绘制的,可以推出第i部雷达对给定空间h高度层平面内的A点处目标的检测概率,计算公式为[5]

其中,dio为第i部雷达检测概率为0.5时的作用距离。
2 基于融合检测概率的雷达网威力范围计算模型
文献[3]指出:雷达网分为共站式和分布式两种类型,雷达网探测范围是指由网内所有雷达的探测范围组合形成的探测区域,区域边界按照取并集处理。经分析可知,雷达网的探测范围是网内所有雷达探测范围求并得到,图形求并过程中并没有考虑融合检测概率的因素,尤其是两部同威力雷达组成共站雷达网时。因此,下面从雷达探测范围的定义出发,分析并建立雷达网探测范围的定义和计算模型。
雷达网的融合检测概率与其融合准则有关[6]。以“或”准则为例,雷达网融合检测概率如式(7)所示:

式中,Pdn为融合检测概率;n为网内雷达数;Pdi为第i部雷达的检测概率。
基于融合检测概率的雷达网威力范围计算方法步骤如下:
1)根据网内雷达的威力范围,初步划定雷达网威力范围的预定区域,将区域分割成若干点si,得到原始点集{si}(i=1,2,…,m),令 i=0;
2)若i++>m,转到步骤10);否则,转步骤3);
3)确定雷达集合{Rj}(j=1,2,…,n),令 j=0;
4)若j++>n,转到步骤6);否则,转步骤5);
5)按式(2)计算雷达Rj在点si处的检测概率,转步骤4);
6)按式(7)计算融合检测概率;
7)若融合检测概率小于门限(警戒取0.5,引导取0.9),转到步骤9),否则,转步骤8);
8)将点si加入雷达网威力范围Sn;
9)若i<m,回到步骤2),否则转步骤10);
10)输出雷达网威力区Sn。
3 仿真分析
3.1 仿真条件
假设某型雷达给定检测概率0.5时,探测距离为200km,现由两部此型雷达组成共站式和分布式雷达网,雷达站部署位置和间距如表1所示。下面分别按照文献[3]和本文方法对该雷达网探测范围进行计算分析,计算时假设目标的雷达截面积相对网内雷达一样,不考虑地形地物对雷达威力区的影响。本文方法仿真流程如图1所示。

图1 本文算法流程图
表1 仿真条件
3.2 仿真结果及分析
按照区域求并方法和本文方法,分别对上述四种雷达网的警戒威力范围进行计算,仿真结果如图2~5所示,图中细线为区域求并方法计算的雷达网威力范围边界,粗线为基于融合检测概率方法计算的雷达网威力范围边界。
分析得出:
1)对共站式雷达网而言,如图2所示,本文算法得出的雷达网威力区比区域求并方法得到的威力区明显增大;

图2 雷达间距0km时的威力图(共站式)
2)对分布式雷达网而言,当雷达间距较小时(见图3-图4),区域求并方法计算得到的威力范围都小于本文方法计算得到的威力范围,这是由于雷达之间重叠覆盖区的检测概率增大的结果;
图3 雷达间距350km时的威力图(分布式)
3)对分布式雷达网而言,当雷达间距大到一定程度时(见图5),两种方法计算得到的威力范围基本一致,这是由于雷达之间区域的融合检测概率不能达到警戒(0.5)的要求;
4)考虑融合检测的本文算法对雷达网威力区的计算更加精确,更能体现雷达网融合检测对威力区的贡献,该算法对评估雷达网性能有实际意义。
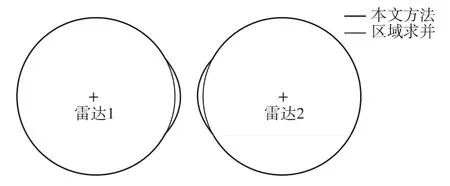
图4 雷达间距470km时的威力图(分布式)

图5 雷达间距500km时的威力图(分布式)
4 结束语
雷达威力范围是衡量雷达性能和优化雷达网布站的重要指标之一。本文给出了雷达网威力范围的科学定义,建立了雷达网威力范围计算模型。本文揭示了融合检测概率与威力范围的理论联系,描述了雷达网的威力范围,使得雷达网的威力范围分析更加精确和直观,对于雷达网作战能力分析和布站优化均有着理论意义和应用价值。
[1]丁鹭飞,耿富录.雷达原理[M].第3版.西安:西安电子科技大学出版社,2002.
[2]陈永光,李修和,沈阳.组网雷达作战能力分析与评估[M].北京:国防工业出版社,2006.
[3]华中和.雷达网信息处理(上册)[M].武汉:空军雷达学院,1992.
[4]邵国培,何俊,等.电子对抗作战效能分析[M].北京:解放军出版社,1999.
[5]郭正新,江晶.一种不同距离的雷达检测概率计算模型[J].空军雷达学院学报,2003,17(4):7-9.
[6]何友,王国宏,等.多传感器信息融合及应用[M].北京:电子工业出版社,2000.
猜你喜欢
湖南电力(2022年3期)2022-07-07
中学生数理化·中考版(2022年6期)2022-06-05
中学生数理化·中考版(2021年6期)2021-11-22
新世纪智能(数学备考)(2021年4期)2021-08-06
新世纪智能(数学备考)(2021年4期)2021-08-06
制导与引信(2017年3期)2017-11-02
小星星·阅读100分(高年级)(2016年10期)2016-09-10
雷达与对抗(2015年3期)2015-12-09
小学阅读指南·低年级版(2015年2期)2015-03-17
汽车电器(2014年5期)2014-02-28