
舰载机典型调运方案推演与时序优化
2021-06-08 07:04郑茂颜世伟初秀民邹运其谢朔
中国舰船研究 2021年3期
郑茂,颜世伟,初秀民,邹运其,谢朔
1 武汉理工大学 国家水运安全工程技术研究中心,湖北 武汉 430070
2 中国人民解放军92942部队,北京 100161
3 长江航道局,湖北 武汉 430014
0 引 言
舰载机甲板调运方案包含滑行路径及时序两方面的内容,优秀的舰载机调运方案可有效提升舰载机的紧急出动架次率,从而确保航空母舰在突发高威胁态势下的生存能力。美国近年来利用先进的智能算法,探索舰载机的优化调度策略以进一步释放航空母舰的作战能力,开发了一个名为“作战计划人员甲板作业课程”(deck operation course of action planner, DCAP)的系统[1],用于模拟航空母舰甲板上行动的随机性事件,并训练机器学习算法来完成舰载机的优化调度。美海军航空数据管理和控制系统(ADMACS)已装备于航空母舰上[2-3],用于跟踪舰载机飞行计划执行情况,同时以可视化的形式监控舰载机的出动回收过程。
在舰载机调运研究方面,国内学者主要针对调运路径、调运时序这2个方面建立了各类数学模型,并利用启发式和群智能优化等算法对舰载机的调运方案进行搜索寻优。韩维等[4]提出了凸壳结构的舰载机轮廓,其以粒子群算法的粒子速度作为舰载机的滑行速度矢量,以最小总滑行距离为优化目标,开展了静态调运路径规划。贺少华等[5]将A*算法引入调运路径搜索中,获得了快速进入弹射器滑轨的调运路径。张智等[6]针对有杆牵引系统甲板调运,提出基于舰载机本体及障碍物目标的凸壳结构,推导出多目标间碰撞检测及距离计算方法,以人工势场法建立了避碰路径规划模型。刘洁等[7]针对舰载机滑行、无杆牵引、有杆牵引这3种不同的运动模型,建立了舰载机调运轨迹跟踪理论,确保了无人机自动滑行的运动控制精度。对于多舰载机协同调运过程,每架飞机的调运时序是关键。高杰等[8]提出了一种基于混合整数规划的舰载机甲板调运协调算法,解决了多舰载机调运过程中的协调和避碰问题。杨炳恒等[9]分析了舰载机出机库作业时序,建立了舰载机交通网络模型,对作业时序方案进行启发式搜索优化,进而使人员和装备得到最大利用率。司维超等[10]以总调运时间最短、总调运距离最短为优化目标,分别利用粒子群和遗传算法,得出了舰载机舰面最优布列和调运时序。
在实践方面,目前国外主要通过指挥员提前手动编排调运方案,过程中利用显灵板、指挥电话等辅助装置进行指挥,对于舰载机数量较少的场景,能取得很好的调运效果,但对于大机群出动等复杂、并行调运方案的编排,存在一定的难度,且对于随机事件的鲁棒性不足。
综上所述,目前关于舰载机调运路径、时序的优化主要采用启发式搜索,计算效率不高,尤其是面向多机的并行出动回收作业难以快速获得最优调运方案。
因此,本文拟针对“福特”号航空母舰典型舰载机波次出动回收作业流程、初始布列形式、调运原则及约束条件等,引入图论网络拓扑结构,以实现调运路径的快速规划;建立舰载机滑行运动数学模型,利用视线法完成精确轨迹控制,针对多机同步并行调运作业,提出一种快速调度时序生成与优化方法,在保证规定数量舰载机调运总时间最短的前提下,实现高计算效率。
1 基于网络拓扑结构的调运路径规划
1.1 有向多值网络
拓扑网络是网络结构分析、路径规划的重要工具,网络的类型有很多,对于舰载机调运路径规划这类流量、距离敏感型网络结构,需要对节点间的通路进行加权;与此同时,考虑到舰载机的滑行过程不可倒退,故应采用有向多值网络表示调运滑行路径。在此基础上,采用Dijkstra,Warshall-Floyd等算法可快速获取调运与避碰路径。
舰载机在甲板面的实际调运过程中,均按区域进行“接力式”调运指挥,每个区域有多名调运员具体负责本区域舰载机的调运指挥,每个区域的调运路线相对固定。这种做法有如下优点:一是调运路径由多段通路首尾相接组成,相对固定,极大地减少了不确定性,缩短了路径规划时间;二是便于调运方案的快速下达,便于调运员更准确地理解调运方案。在充满随机事件的飞行甲板上,“不怕慢就怕站”,“确定”即“高效”,尽可能降低调运过程中的不确定性是确保调运效率的关键。
1.2 舰载机甲板调运网络拓扑结构
定义:路径节点i与j之间若有直接通路r,即定义该通路rij为通路元,表示从节点i到节点j之间可单向通畅,该通路元的直线长度为该通路元的距离。邻接矩阵元素可表示为

距离矩阵元素为

式 中:pos(i),pos(j)分 别 为 路 径 节 点i,j的 坐 标;‖·‖为2个路径节点之间的直线距离。
以“福特”号航空母舰为研究对象,将机务保障站位、临时停机位、起飞点等调运起点、终点作为有向路径节点,滑行过程中的转向点作为无向路径节点,如图1所示。分别针对舰载机的出动、回收等典型作业状态下舰载机的实际调运路线,确定调运路径节点。通过逐一判断任意2个路径节点之间是否直接连通,获取邻接矩阵和距离矩阵。
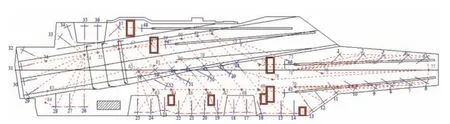
图 1 “福特”号航空母舰甲板调运网络拓扑结构Fig.1 Deck handling network topology for USS Ford class aircraft carrier
1.3 调运路径规划和避碰策略
调运路径规划以路径最短为目标,采用Warshall-Floyd算法搜索、获取最优调运路径节点序列。采用该算法搜索最短路径具有计算复杂度低、可同时对全部路径节点搜索的优势,便于提高计算效率。
对于多机调运期间的碰撞检测和自动避碰策略,考虑到实际调运中舰载机滑行机动性差,且与周边舰载机的距离十分有限,当两架舰载机的间距小于安全阈值时,其中一架舰载机需等待另一架通过后,才能继续滑行,而非重新规划新的避碰路径。从简化计算且不失精确性的原则出发,将舰载机最小外接圆圆心作为形心,定义舰载机m和n的 形心间 距 为Dmn,如图2所示。当Dmn小于安全阈值时,分别计算两架舰载机当前位置距离二者滑行路径交汇节点的距离,距离近的优先滑行通过,待二者间距重新大于安全阈值后,另一架舰载机继续滑行。

图 2 舰载机避碰策略Fig.2 Collision avoidance policies for carrier-borne aircrafts
2 舰载机甲板调运仿真推演
前述内容明确了舰载机甲板调运网络拓扑结构和最优路径节点序列,在此基础上,可建立舰载机滑行运动及控制模型。
2.1 舰载机滑行运动模型
舰载机滑行运动受力可以分解为:向前的发动机推力、空气阻力、机轮滚动阻力、机轮横向摩擦阻力等,假设舰载机前轮仅有滚动摩擦,而不发生侧向滑动,则舰载机的水平位置、首向方位角均可通过几何学表述,如图3所示。

图 3 舰载机滑行运动分析Fig.3 kinematics model for carrier-borne aircraft taxiing
建立甲板全局坐标系XOY,设舰载机前轮与主轮之间的距离为L,主轮连线中点为o′,舰载机的首向方位角 ψ 为机首与Y轴正向夹角,前轮 A的转角为δ(右转为正),前轮的滑行速度为vF,则主轮连线中点o′的速度可代表舰载机的滑行运动速度v,于是舰载机m的 运动状态Xm=[xm,ym,vm,ψm,δm]T可写成如下运动微分方程。

式中, dδm为 舰载机前轮转向角速度。为简化调运方案推演计算的复杂度且不失精确性,假设舰载机前轮滑行速度vF为定值,一般可由统计结果确定。通过求解微分方程(式(3))获得舰载机的位置、滑行速度、首向方位角等实时参数。
2.2 基于视线法的运动控制模型
为将舰载机滑行轨迹控制在目标路径附近,引入视线法(line-of-sight, LOS)实时分析舰载机的位置偏差和首向方位角[11],求解舰载机的视线角( φLOS),判断是否接近某路径节点并切换下一路径节点,前轮转角控制目标为 δ=φLOS-ψ。
通过求解运动微分方程,并利用视线法进行轨迹跟踪控制,舰载机从初始位置出发,经过WP1~WP5,最终到达WP6,如图4(a)所示。其跟踪误差主要出现在目标路径节点切换瞬间,最大不超过2 m,10 s左右即返回目标路径,可见控制精度良好,如图4(b)所示。
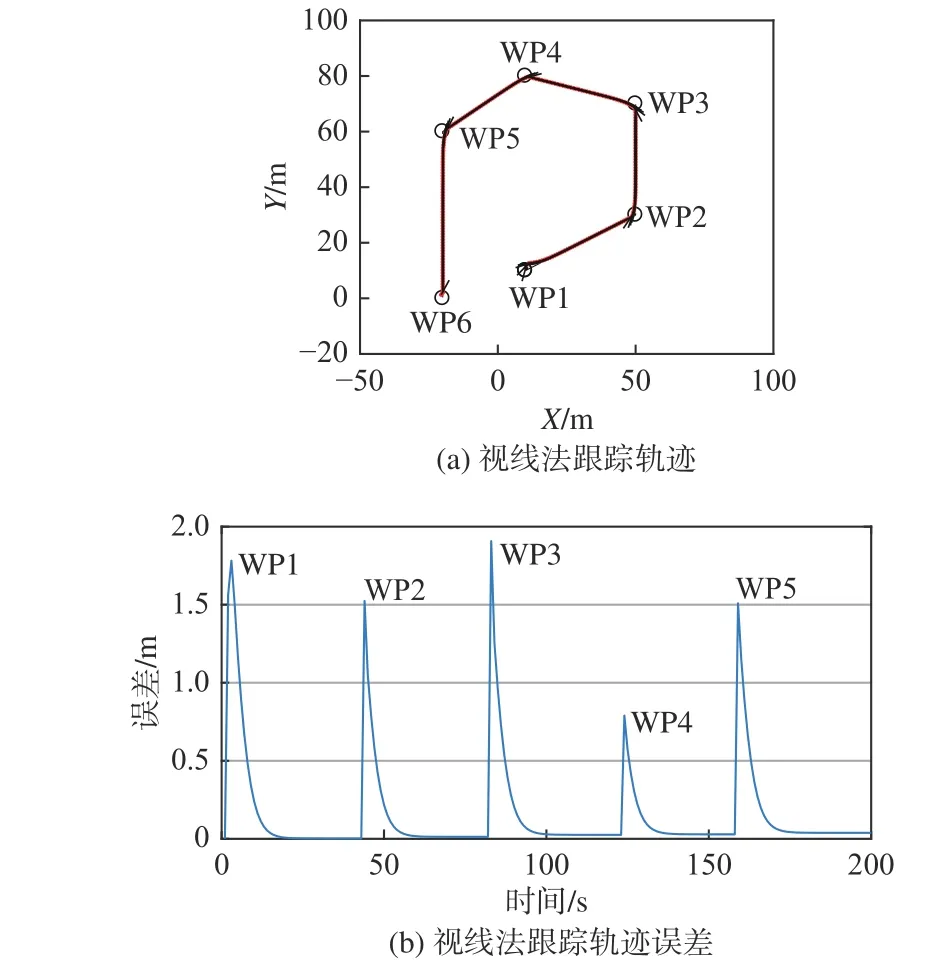
图 4 视线法跟踪结果Fig.4 Results of LOS controlling method
由于舰载机滑行起点和终点均为预先确定的停机位,都属于有向路径节点,只能按照停机位指示方位停放,因此在有向路径点(停机位)沿滑行方向增加一个临时无向路径点,以达到光顺进出有向停机位滑行路径的目的。
3 多机调运过程推演与时序优化方法
3.1 多机调运过程推演
在确定每架舰载机当前位置至调运目标位置之间最短调运路径的基础上,开发计算机调运推演程序,实现多机快速推演。
调运推演程序通过最优路径节点序列规划和求解运动微分方程、LOS轨迹跟踪控制、自主避碰与等待、图形化显示等一系列计算,以实现多机同步调运方案推演,具体流程如图5所示。本文将分别针对起飞和回收作业,探讨调运时序方案优化方法。
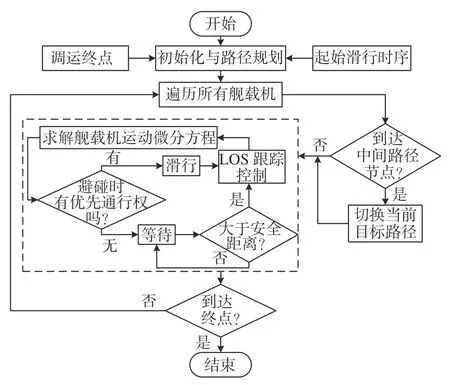
图 5 多机调运推演流程Fig.5 Flowchart of multi-aircraft deck handling simulation
3.2 起飞作业调运时序优化方法
在实际调运作业中,时序是保证调运效率的关键,受诸多因素的约束,本文将提出一种调运时序快速优化方法。以波次出动调运为例,多架舰载机从不同停机位出发,分别前往不同弹射器位置,因此涉及多部弹射器对应舰载机的虚拟排队问题。现实中,这类并行作业会出现不同队列舰载机滑行路径交叉、延误等复杂情况,属于典型的复杂调运场景。
在每个停机位所对应的目标弹射器已确定的前提下,调运时序优化算法的设计变量指的是每架待飞舰载机的起始滑行时刻。
调运约束条件可归纳如下:
1) 舰载机从停机位到起飞位需自主滑行,只能前进不能后退;
2) “福特”号航空母舰左舷3#弹射器有舰载机时,4#弹射器不得开展弹射作业,舰载机弹射杆不挂钩;
3) 在弹射起飞位进行起飞前准备作业的时间服从正态分布;
4) 同时调运的舰载机架数不得大于调运员总人数;
5) 两架舰载机之间的安全间距为飞机轮廓外接圆直径。
在满足上述约束条件的前提下,遵循如下原则开展多机调运时序优化:
1) 起飞作业期间,距弹射器近的舰载机优先开始滑行;
2) 预警机的优先级高于战斗机;
3) 停放于降落甲板的舰载机优先起飞;
4) 尽可能缩短弹射器空闲等待时间,提高弹射器利用率。
将总的起飞调运作业时间最短作为调运时序优化目标,可建立如下优化目标函数:

式中,TS,m,tm,tCATA,m分别为第m架舰载机开始滑行时刻、调运时间、弹射准备时间。
为实现上述优化目标,本文提出的优化方法分为3步,即弹射器负荷分配、起始滑行时刻倒排、调运时间压缩。
1) 弹射器负荷分配。
在多部弹射器同步放飞舰载机时,为缩短起飞作业总时间,需平均分配每部弹射器的作业负荷,合理安排每部弹射器所需弹射的舰载机序列。按照舰载机初始停机位至各弹射器最短路径距离进行排序,确定每架舰载机最近的弹射器,完成初步舰载机分配。当多部弹射器同步工作时,可能存在舰载机集中分配到某一部弹射器的情况,此时再将距离该弹射器较远的舰载机组成新的集合,按照距离由近及远进一步分配到其他弹射器,依此类推,使每部弹射器分配的舰载机架数大致相当。
2) 起始滑行时刻倒排。
为实现最大的弹射器利用率,假设每部弹射器均为连续不间断地弹射舰载机,则弹射时刻序列是已知的,舰载机的起始滑行时刻可通过弹射时刻倒排获得。针对每部弹射器所分配的舰载机,以到本弹射器的距离从小到大排序,距离近的舰载机优先开始滑行。设总的舰载机出动作业开始时刻为T0, 第i部 弹射器对应第m架舰载机起始滑行时刻为Tim, 则每架分配到第i部弹射器的舰载机弹射起飞时刻可表示为:

式中:tim为第i部 弹射器分配的第m架舰载机的调运滑行时间;tCATA,im为该机的弹射准备时间; Ωi为第i部弹射器分配的舰载机集合。因此,可由式(5)倒排该机的起始滑行时刻:

3) 调运时间压缩。
通过倒排起始滑行时刻,能很好地完成无交叉路径的“单线”调运时序规划,而对于多部弹射器同步并行放飞舰载机的情况,很可能出现多架舰载机滑行路径交叉,需要等待前机通过后再继续滑行的现象,如此一来便会打乱原有时序,增加随机性。为降低甲板上出现拥堵的可能性,应推迟后机的起始滑行时刻,以避免在滑行过程中等待而造成其他舰载机进一步的拥堵。设第m架舰载机需等待第n架舰载机的时间为tW,mn,则第m架 舰载机的起始滑行时刻需要延后tW,mn,依此类推,后续使用该弹射器的舰载机起始滑行时刻均要推迟tW,mn。为避免起始滑行时刻延后造成与其他舰载机发生碰撞的可能性,结合调运仿真推演,多次联合使用调运时间压缩和起始滑行时刻倒排这2步算法,一般经2~3次处理后即可获得连续、合理、耗时最短的调运时序方案。
3.3 回收作业调运时序优化方法
回收作业中,舰载机按照1架/min的频率落在着舰跑道前部,之后,滑行至舰艏、右舷的各停机区。其调运原则可梳理为:
1) 舰载机着舰后调运目标停机区的优先顺序为:舰艏停机区左舷>舰艏停机区右舷>右舷中部>岛式上层建筑左前方>岛式上层建筑后方;
2) 各停机区内的停机顺序根据滑行路线由远及近提前指定。
由于回收作业仅有1个初始位置,且每分钟仅能回收1架舰载机,不存在多架飞机滑行路径交叉、碰撞的可能,因此回收作业调运时序规划仅需按照单机点到点的调运过程推演即可实现。
4 仿真实验验证
4.1 甲板布列调运快速推演软件开发
基于Matlab 2016b GUI编写了舰载机布列调运快速推演程序,开发了人机图形化操作界面,集成了甲板调运路径节点设置、舰载机布列方案辅助生成、舰载机弹射器自动分配、调运时序自动优化等功能,具备以1~100倍速调运推演的能力。与此同时,支持弹射起飞准备时间分布、可用弹射器、弹射器随机故障等参数的设置。
考虑到舰载机真实调运过程持续数小时,为确保调运推演仿真程序运行的连贯性、时效性,实现快速推演以节省方案演示耗时,采用了定时器用于平衡舰载机滑行运动仿真控制与演示动画生成之间的任务分配。其中,调运时序优化计算不涉及演示动画绘制,故完成优化耗时在1 s以内。
4.2 典型出动回收作业调运方案推演
基于上述软件,对18架机波次起飞、波次回收作业进行推演,其仿真参数如表1所示,初始状态如图6所示。18架机主要停放在右舷、舰岛后方、左舷后部、着舰跑道后部等区域。在仅采用就近原则排列舰载机出动时序的条件下,18架舰载机利用3部弹射器(catapult)起飞,总耗时24.25 min,如图7(a)所示,2#,3#弹射器在920 s后处于空闲状态,舰载机主要利用4#弹射器起飞,弹射器负荷差别较大,排队现象明显。统计弹射作业间隔时间的概率密度(图8(a))以及概率分布(图8(b))。图8(a)中,绿色柱状图表示舰载机弹射作业间隔时间出现的次数,蓝色曲线为拟合结果。如图8(b)所示,经与美国海军1997年高强度演习期间的统计数据相比,发现本推演弹射起飞间隔时间更长,概率分布曲线更平缓。
通过弹射器分配、起始滑行时刻倒排、调运时间压缩等自动优化,其总调运时间缩减为17.52 min,如图7(b)所示。其中3部弹射器空闲时间大为减少,每部弹射器的作业负荷更为均衡,弹射器利用率高。如图8(c)所示,由于3#,4#弹射器的弹射作业负荷更加均衡,故其作业节奏更为一致,整体弹射起飞作业时间相对减少。由图8(d)可知,时序优化后本调运推演的起飞间隔时间分布与美军演习统计曲线相近,即出动效率与美军接近。
回收作业完成后,18架舰载机在飞行甲板的布列状态如图9所示。舰载机从着舰跑道滑行至目标停机位的时间在30~90 s之间,完成全部18架机回收及调运作业的总时间为17.48 min,如图10所示,目标停机区包括舰艏左、右舷以及舰岛左前方停机位,均为自行滑行进入停机位。

表 1 调运推演参数设置Table 1 Parameters setting of handling simulation
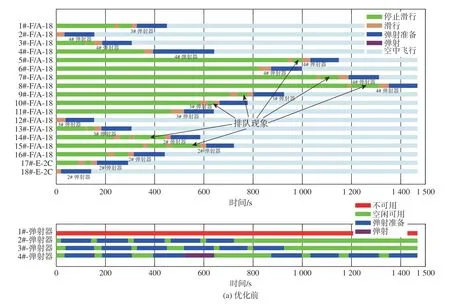
图 6 18架机波次起飞作业初始状态Fig.6 Initial state of launching operation for 18 aircrafts

图 7 18架机波次起飞调运作业甘特图Fig.7 Gantt-chart of launching operation deck handling for 18 aircrafts
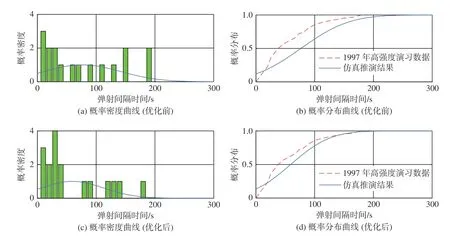
图 8 弹射间隔时间统计Fig.8 Statistics of the interval time for launching
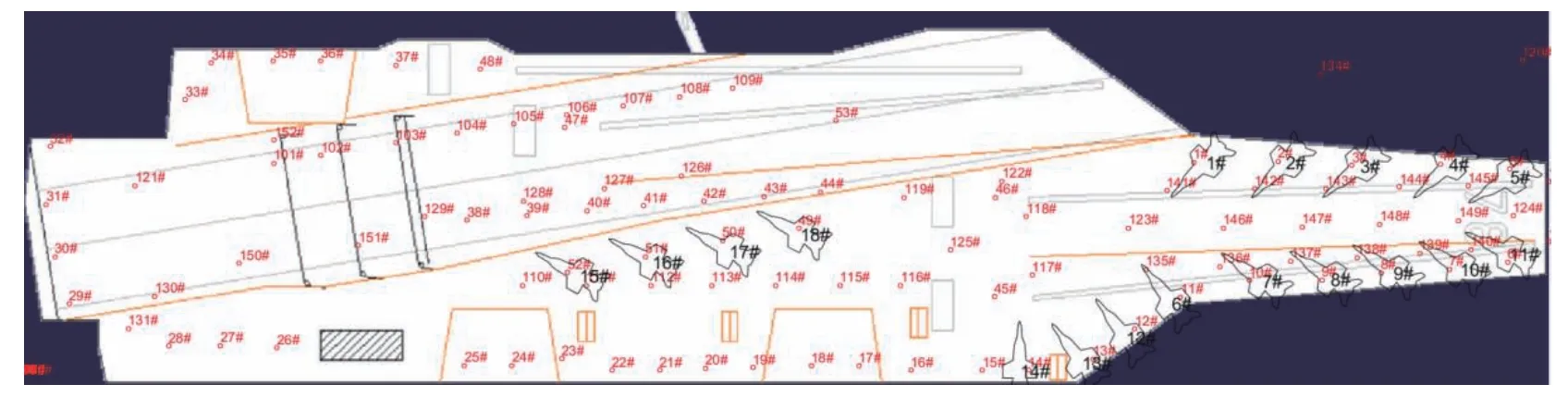
图 9 18架机波次回收作业完成状态Fig.9 Final state of recovery operation for 18 aircrafts

图 10 18架机波次回收调运作业甘特图Fig.10 Gantt-chart of recovery operation deck handling for 18 aircrafts
5 结 论
本文以美国“福特”号航空母舰为研究对象,建立了舰载机甲板调运方案推演与时序优化模型,开发了相应的仿真软件以辅助人员完成调运方案的快速规划,针对典型舰载机波次起飞和回收作业,取得了较好的优化效果。具体结论如下:
1) 建立的甲板调运网络拓扑结构可用于舰载机调运路径快速规划,且符合实际调运路线特征;
2) 建立的舰载机运动模型及轨迹跟踪控制方法可实现舰载机的滑行运动仿真;
3) 舰载机出动作业涉及多机多弹射器的多队列并行作业,优化难度大,采用“三步法”能有效表达调运原则,实现快速调运时序优化,缩短总调运时间,具有极高的规划运算效率;
4) 舰载机回收作业属于“单线程”调运,较少涉及多舰载机之间的交叉避碰问题,更易于实现自动调运方案生成。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
小猕猴智力画刊(2022年3期)2022-03-28
农业工程学报(2022年1期)2022-03-25
意林·作文素材(2021年23期)2021-01-22
中国绿色画报(2017年8期)2017-09-01
兵器知识(2017年2期)2017-02-21
湖北畜牧兽医(2016年8期)2016-11-21
兵器知识(2015年6期)2015-06-25
集装箱化(2014年11期)2014-12-17
现代军事(2009年3期)2009-05-26
