
虚拟手术中缝合过程的相关技术
2013-04-12 00:32:38吕梦雅韩育芳
吉林大学学报(工学版) 2013年1期
吕梦雅,韩育芳,唐 勇
(1.燕山大学信息科学与工程学院,河北秦皇岛066004;2.燕山大学河北省计算机虚拟技术与系统集成重点实验室,河北秦皇岛066004)
虚拟手术是虚拟现实技术在医学领域的重要应用。它可以使医生沉浸在虚拟的环境中进行手术培训和手术规划,与传统训练方法相比,不仅可以节约手术训练的时间和费用,而且降低了实习手术的风险,对促进医学水平的发展具有重要意义。
早期对虚拟手术系统的研究主要集中在软组织形变算法的研究上,对缝合算法的研究起步较晚。1998年,法国国家信息与自动化研究所的Delingette[1]提到了虚拟手术中缝合模拟并说明了它的重要性,激发了人们对缝合模拟研究的热情。2001年,米勒斯维尔大学的Roger等[2]做了一个初步的皮肤缝合模拟,但缝合线仅仅是简单的从缝合点到针眼的直线绘制,没有对缝合线与软组织的交互模拟。2001年,斯坦福大学的Joel等[3]对血管缝合进行模拟,用质点弹簧建模血管,跟踪头结点(Follow The Leader,FTL)方法计算缝合线的运动轨迹,但是由于FTL方法是基于几何的方法,所以无法对缝合线进行受力分析。2002年,英属哥伦比亚大学的Dinesh[4]用Cosserat Rod理论建立细长柔性体的模型并对缝合线进行了建模,但是几何线性导致缝合线发生较大的形变时易产生失真现象。2003年,西蒙菲沙大学的Matt等[5]对两个面片进行缝合,用质点弹簧模型建模面片和缝合线,并提到了缝合过程中出现的摩擦力,但并没有对摩擦力作出计算。2004年,Moll等[6]根据能量最小原理提出柔性线路径规划的算法。通过定义线的旋转应力的方程来计算线的新位置。2007年,波兰罗兹大学的Blazej等[7]将质点弹簧方法与基于位置的布料模拟方法相结合来模拟线的运动,体现了线的扭曲,但是因为扭转和弯曲运动不能耦合,许多扭曲效果不能重复。2008年,西蒙菲沙大学的Shi等[8]用有限元模型对缝合线进行建模,实现了两块皮肤的缝合模拟,但是缝合线建模精度高导致计算开销大。2010年,Payandeh等[9]用质点弹簧建模皮肤并进行了皮肤的缝合模拟,实验中主要模拟了缝合线对皮肤的撕裂现象,但是在皮肤的同一个地方撕裂,会造成许多小的三角面片,影响皮肤的重新绘制。2012年,Choi等[10]利用物理引擎PhysX模拟了伤口的缝合,运用物理引擎使工作变得简单,但PhysX是面向游戏产业的商业物理引擎,用它来开发虚拟手术系统具有一定的局限性。
综上,本文采用质点弹簧方法对皮肤进行建模。基于物理的质点弹簧对交互过程中出现的摩擦力进行计算,基于几何的FTL方法重建缝合线的构型。设置标记来记录缝合点信息,以方便计算连续缝合过程中软组织的形变。
1 软组织形变的动力学模型
有限元法和质点弹簧法是虚拟手术中常用的两种基于物理的软组织建模方法。有限元法将软组织离散成若干单元,其优势是模型参数易于调节,且采用描述建模对象结构特性的本构方程越精细和离散单元越多,建模精度就会越高,得出的结果越真实,但会造成求解过程复杂,运算量大,难以达到实时仿真交互的要求。而质点弹簧法对软组织质点离散化,具有易于实现、实施简单、计算效率高等优点,因此质点弹簧法更适合对皮肤建模(见图1)。
由于皮肤的质量分布相对均匀,所以采用质点均匀分布的四边形作为静态模型的拓扑结构。
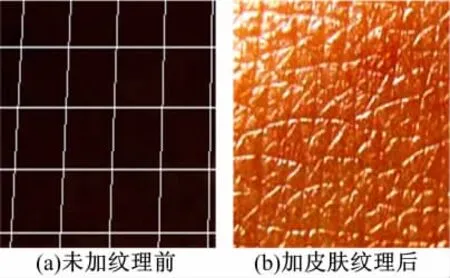
图1 基于质点弹簧模型建立的皮肤软组织Fig.1 The skin model based on spring-massmodel
对任何一个质点i,满足以下动力学方程

式中:mi为质点i的质量;ai为加速度;Fs和Fd为质点i受到的弹簧力和阻尼力,由方程(2)和(3)计算得出;Fext为质点i受外力的合力。

式中:Fij为计算质点i和j间的弹力函数;σ(i)为与质点i邻接的所有质点的集合;xi和vi是i的坐标和速度;f为引入的内摩擦力系数。

式中:dij为质点i和j的当前距离,rdij为初始距离;uij为i到j的单位矢量;k为弹簧劲度系数;通过调节k和f获得理想的软组织形变效果。
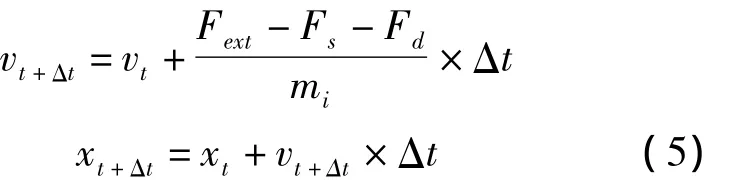
通过不断更新质点的位置,实现软组织的形变模拟。经过Δt后,即在t+Δt时刻,质点i的速度和位置如下
用鼠标对皮肤模型施加拉力时,对于力的作用点不是皮肤模型质点的情况,我们采用改进的方法寻找受力作用点。本文中模型的基本元素是一个中心质点与和它相连的四个邻接点,所以,我们先将作用点位置与整个模型的中心质点的位置作对比。假设计算所得距离为l0,依次计算它与中心质点的四个邻接质点的距离l1,l2,l3,l4,将这四个距离与l0作比较,将其中距离值最小的点作为新的中心质点。重复上述过程,直到找到与之距离最小的模型中的质点,这时,就可以将这个质点作为受力作用点。本文中,因为对每个质点都设了索引值,所以,通过中心质点的索引很容易找到它的四个相邻的质点。知道质点的索引值便可以确定质点在三维世界中的位置。使用这种方法计算受作用力的质点有效的减少了寻找范围和比较的次数,提高了形变计算效率。
图2展示了鼠标拉动模型中的一个质点和多个不同质点发生形变的效果,图2(c)、(d)是对应的加纹理后侧面观察到的皮肤形变效果。鼠标接触到物体表面上的质点时,采用改进的方法寻找模型中的受力作用点,对该点赋予沿鼠标方向的拉力,该点将随着鼠标移动,带动模型中其它质点运动,引起软组织形变。

图2 软组织模型的形变效果Fig.2 Deformation of the soft tissuemodel
2 真实感缝合线建模及其运动
2.1 FTL方法实现缝合线的轨迹跟踪
本文的质点弹簧模型建模的缝合线,用一些长为l的线段将模型中的质点连接起来,以表示一条完整的缝合线。仅用依次连接的线段表示缝合线,虽然能够表示线的特性,却不能表示线的宽度。为了避免这个问题,本文绘制了与缝合线线段数目相同的圆柱体,将这些圆柱体加在每个缝合线线段的表面上,以显示出缝合线的立体感。可以通过在程序中改变对应的参数调整缝合线的长度、粗细、颜色等信息,以达到逼真的缝合线建模。为了避免质点弹簧模型发生大形变时难以控制的缺点,使用FTL计算各个缝合线质点的新位置,得到缝合线的新构型,实现缝合线轨迹跟踪(见图3)。每次用FTL更新缝合线各质点位置前,比较交互点最大静摩擦力与当前摩擦力的大小,决定是否发生相对滑动。控制点j受外力作用从Pj.old运动到 Pj.new,则它相邻质点 j+1的新位置就是沿 Pj+1.old到 Pj.new方向移动一个单位长度。


图3 缝合线运动效果Fig.3 M ovement of the suture
2.2 缝合线与软组织交互的物理建模
当缝合线通过软组织时会在软组织上形成一个洞,实验过程中用质点弹簧模型中的网格形成一个洞,会造成缝合线与皮肤的交互模拟过于复杂。我们采用将缝合线上的质点与软组织上的质点相连,缝合线由于静摩擦力带动皮肤模型中的质点一起运动,由胡克定律可知,随着质点被拉动,它受到来自皮肤模型中相邻质点的拉力越来越大,导致缝合线与皮肤质点发生相对滑动。为了真实地表现这一过程,我们对交互点的受力情况进行分析。图4中,实心点为软组织结点,空心点为缝合线结点,F1,F2为弹簧的拉力,f12,f23为线两端的张力。
当1,3之间的缝合线处于拉伸状态时,交互点的静摩擦力方向,即相对运动方向,与缝合线拉伸的方向相同,则有
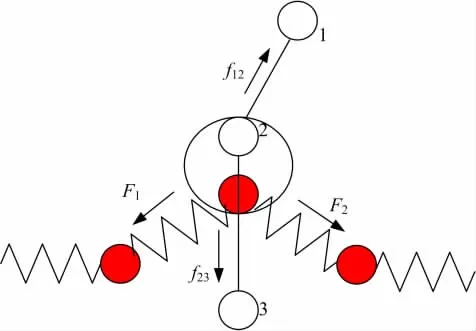
图4 缝合线与软组织交互Fig.4 interaction between suture and soft tissue

式中:p1,p2为结点1和2的位置。压力方向与相对运动方向垂直,设为v。压力等于四个力的合力在v方向上的投影,则有:

于是得最大静摩擦力为

静摩擦力的大小为合力在u方向上的投影

3 连续缝合过程实现
完成一次缝合后,下一次缝合由于拉动软组织产生形变,已缝合质点会因受力不同而分离。为了避免这种情况,使每个已缝合的质点位置在多次缝合过程中保持一致,对每个皮肤质点设标记stitch,若两个质点发生缝合,stitch记录对应缝合点的索引,形变计算过程中让对应的值位置保持一致。图5展示了多次随机缝合后软组织及其相应的网格模型形变效果。实际缝合中,每完成一次缝合,要打结作为结束,再移动缝合线进行下一次缝合。实验中由于没有手术器械的运动模拟,所以图5中缝合线只停留在当前缝合处。

图5 连续缝合过程中的软组织形变Fig.5 Soft tissue deformation in a continuous pattern suture
4 实验结果分析
实验硬件平台为Intel(R)Pentium(R)D CPU 3.0GHz 1.0GB内存,软件平台为OpenGL与VS2005。图6展示了完成一次缝合过程。
图7(a)、(b)展示了文献[7]和本文的缝合效果。文献[7]中线性有限元建模的缝合线形变大时易失真。
而本文采用FTL算法计算缝合线各质点的位置,使其更接近真实线的形态,符合缝合线的刚体特征。

图6 一次缝合过程Fig.6 The procedure of a single stitch

图7 不同方法建模的缝合线效果对比Fig.7 comparison of suture based on differentmethod
5 结束语
本文采用质点弹簧方法对皮肤进行了建模并用改进的方法寻找受力作用点;物理和几何相结合的方法建模真实感缝合线,对缝合线与软组织间的力学交互过程进行了研究与实现;引入缝合标记真实地实现了连续缝合过程中软组织形变。实验中没有对手术器械及缝合线打结过程做出模拟,故手术器械的运动及打结模拟将是以后的主要研究内容。
[1]Delingette H.Towards realistic soft tissue modeling in medical simulation[J].Proc.of the IEEE:Special Issue on Surgery Simulation,1998,86(3):512-523.
[2]Roger W Webster,Dean IZimmerman,Betty JMohler,et al.A prototype haptic suturing simulator[C]//Medicine Meets Virtual Reality 2001,Amsterdam:IOSpress,2001:567-569.
[3]Joel Brown,Kevin Montgomery,Jean-Claude Latombe,et al.A microsurgery simulation system[C]//Proceedings of the 4th International Conference on Medical Image Computing and Computer-Assisted Intervention,London:Springer-Verlag,2001:137-144.
[4]Dinesh K Pai.Strands:Interactive simulation of thin solids using cosserat models[J].Computer Graphics Forum,2002,21(3):347-352.
[5]Matt LeDuc,Shahram Payandeh,JDill.Toward modeling of a suturing task[C]//Graphics Interface’03.Natick,Massachusettes:A K Peters,2003:273-279.
[6]Moll M,Kavraki L E.Path planning forminimal energy curves of constant length[C]//in Proc.2004 IEEE Intl.Conf.On robotics and Automation.2004:2826-2861.
[7]Blazej Kubiak,Nico Pietroni,Fabio Ganovelli,et al.A robustmethod for real-time thread simulation[C] // Proc.of the 2007 ACM Symposium on Virtual Reality Software and Technology,New York:ACM Press,2007: 85-88.
[8]Shi Fu-han,Shahram Payandeh.On suturing simulation with haptic feedback[C]//Proceedings of the 6th International Conference on Haptics:Perception,Devices and Scenarios,Berlin:Springer-Verlag,2008:599-608.
[9]Payandeh S,Shi F.Interactive multi-modal suturing[J].Virtual Reality,2010,14(4):241-253.
[10]Choi K,Chan S,Pang W.Virtual suturing simulation based on commodity physics engine formedical learning[J].Journal of Medical Systems,2012,36(3):1781-1793.
猜你喜欢
东华大学学报(自然科学版)(2023年2期)2023-05-16 09:21:40
高师理科学刊(2022年4期)2022-05-09 11:41:58
初中生学习指导·提升版(2022年2期)2022-03-08 22:22:28
中学生数理化(高中版.高考理化)(2021年9期)2021-11-05 08:14:12
纺织学报(2021年5期)2021-05-27 06:45:36
高中生学习·高三版(2017年9期)2017-10-26 01:17:49
试题与研究·高考理综物理(2016年3期)2017-03-28 21:15:15
试题与研究·高考理综物理(2016年3期)2017-03-28 21:06:19
中国煤炭(2016年9期)2016-06-15 20:29:53
地下水(2014年2期)2014-06-07 06:01:50
