基于PCI总线和MCX314的运动控制卡的硬件设计
2013-03-20 08:33王晓初陈科
机床与液压 2013年5期
王晓初,陈科
(广东工业大学机电工程学院,广东广州510006)
全自动IC芯片焊线机又称超声波金线邦定机,是一款利用超声波焊线技术,在压力和超声波能量的共同作用下,用细小的金线连接IC芯片电极与框架上的焊盘,从而实现封装前芯片(硅片)内部引线焊接的机电一体化设备。而基于PCI总线和MCX314的2块四轴运动控制卡是这设备上的运动控制中心,由它控制完成焊头的Z轴及XY 工作台上料及下料、焊接等功能部件的运动。
1 运动控制系统的硬件组成
焊线机的运动控制模块的整个硬件结构为“PC+电机伺服系统”,电机伺服系统主要由控制卡、功率驱动器、伺服电机、位置和速度检测传感器等构成。文中主要介绍其中的运动控制卡的设计,该部分是伺服控制系统中最关键的部分。运动控制系统框图如图1所示。

图1 运动控制系统框图
PCI (Peripheral Component Interconnect,即外围部件互联)总线作为一种先进的高性能32/64位局部总线,非常适合于显示卡、网卡、多功能扩展卡等高速外设,它已取代原先的ISA 总线的主导地位,成为工业控制计算机的主流总线。目前实现PCI总线接口的方案有两种:一是采用可编程逻辑器件实现,二是采用专门的接口芯片实现。采用可编程逻辑器件的优点是编程比较灵活,只需要开发要使用的功能,而不必开发符合协议的所有功能,而且这种方法实现的成本比较低廉,但由于PCI总线通信的实现过程比较复杂,所以实现难度较大,并且设计周期长。采用专用接口芯片可以降低开发的难度,而且使用方便可靠,开发周期短,适用于较大批量生产,文中采用专用的PCI总线接口芯片。

图2 控制卡结构图
运动控制卡的PCI总线采用32位的数据传输方式,并且以插卡的形式嵌入到工业控制计算机中,其结构图如图2所示,PCI总线最高工作频率可达33MHz。PCI接口芯片采用PLX 公司的PCI9052,专用运动控制芯片采用日本诺华公司的MCX314,卡上逻辑功能的实现采用Altera 公司主流的PLD 产品——MAX II系列EPM240T100C5N芯片,运动控制卡与外设接口均采用光电隔离。
2 运动控制卡的硬件原理设计
工业控制计算机通过PCI总线向MCX314 发送相关指令实现对电机的运动控制,通过读取MCX314 特定寄存器中的数据来实现对电机运行状态的监控。
2.1 PCI总线接口
在一个PCI应用系统中,如果某设备能够取得总线控制权,就称其为“主设备”;而被主设备选中以进行通信的设备称为“从设备”或“目标设备”,这类设备没有总线控制权限。对于相应的接口信号线,通常分为必备的和可选的两大类。PCI总线接口图如图3所示,其中控制卡只作为目标设备与工控机进行通信,使用47条信号线便可实现PCI总线的电气规范,工控机利用这些信号线对PCI 总线进行数据、地址和状态控制。为了使PCI总线上的信号传输有一个较小的传输延迟时间,在PCI总线与PCI9052 接线之间加入了驱动芯片CBTD3384,该芯片为兼容TTL 电平的10位高速总线转换开关。

图3 PCI总线接口图
PCI9052是PLX技术公司为扩展适配板卡而推出的能提供一种混合的高性能PCI总线目标(从)模式的接口芯片,共有160个引脚,采用QFP/PQFP 封装,是由PCI BUS接口逻辑、LOCAL BUS接口逻辑、串行EEPROM接口逻辑和内部逻辑组成。PCI9052是从模式芯片,要根据需要正确设置其EEPROM的参数,使得系统上电时能正确初始化PCI9052的内部寄存器。其中,只有对PCI Configuration Registers 和PCI Local Registers 正确设定后,才能使计算机上的存储空间地址和卡上的局部存储空间地址形成一一映射的关系,这里所谓的映射就是把一个地址连接到另一个地址。因此,工控机通过访问PCI 地址空间便可以访问运动控制卡的局部地址空间,进而正确调用卡上资源或获取卡上信息。
2.2 控制卡局部总线与MCX314接口
PCI9052 支持从PCI总线到局部总线的内存映射(Memory-mapped)和I/O 映射 (I/O-mapped)的突发信息传输,并且可以实现两个局部总线中断到PCI中断的转换。通过对PCI9052 配置寄存器的设置,PCI的局部总线可以工作在数种模式之下,例如C模式、J模式、ISA模式、C/ISA模式等,文中所设计的局部总线的工作模式为C模式。
专用运动控制芯片MCX314为QFP/PQFP 144 引脚封装,是一个用于实现4轴运动控制的集成电路。其4轴控制中的4个轴都有相同的功能,并且允许最多3轴联动,对于恒速驱动、线性或S曲线驱动都有着相同的操作方法,并且它的所有功能都是由特定的寄存器控制,例如命令寄存器、数据寄存器、状态寄存器和配置寄存器等。运动控制卡上局部总线和MCX314的接线框图如图4所示。
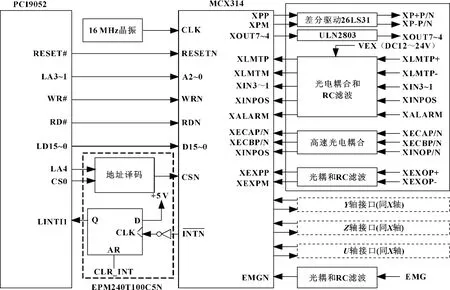
图4 局部总线和MCX314 接线框图
控制卡上实现逻辑控制部分的EPM240T100C5N芯片为QFP/PQFP 100 引脚封装,并且包含80个通用I/O,内核工作电压为3.3 V。该芯片在卡上需完成的功能分为两部分,一部分是用以产生MCX314的片选和中断逻辑,当检测到MXC314的BUSYN 信号为高电平时,由LA4 和CS0#两信号译码成片选信号CSN,从而可以对MCX314 进行数据的读写。LINTI1信号的有效电平被配置寄存器设置为高电平,而INTN的有效电平为低电平,故在INTN 信号端加上一个非门逻辑作为D 触发器的上升沿触发时钟,在INTN 有效即从高电平到低电平转换时,D 触发器被触发,从而使LINT1 高电平有效而向PCI 产生中断请求;另一部分是用以手动模式下手轮脉冲波形的产生,图中nEXPP/nEXPM为相应脉冲信号。
2.3 MCX314的控制原理
MCX314的脉冲输出有2个引脚,分别为nPP/PLS 和nPP/DIR,其输出脉冲有两种类型:一种是CW/CCW类型,另外一种是Pulse/DIR类型。在CW/CCW模式下,进行正方向驱动时,驱动脉冲从nPP输出;进行负方向驱动时,驱动脉冲从nPM输出。在Pulse/DIR模式下,nPP 负责输出驱动脉冲,而nPM 则负责输出方向信号。输出脉冲类型的选择是通过设置MCX314 内部寄存器WR2的D6位来完成的。
MCX314的脉冲输出接口如图5所示,MCX314的脉冲输出引脚nPP/PLS 和nPP/DIR 经数字隔离器ADuM1410 隔离,然后由差分驱动芯片26LS31输出差分信号nP+P/nP+N 和nP-P/nP-N,该差动信号连接至伺服电机驱动器,经功率放大,进而驱动伺服电机。

图5 脉冲输出接口
MCX314的通用输出接口电路图如图6所示,MCX314的通用输出nOUT [7..4]信号,通过光电隔离后经达林顿管IC (ULN2803)驱动输出,在系统复位后每个输出信号均为OFF 状态,该通用输出信号可以用于清除伺服驱动器的误差计数器及警报复位(Alarm reset)。

图6 通用输出接口电路
编码器的接口电路如图7所示,编码器的三相A、/A,B、/B,Z、/Z 六路信号分别连接至nECAP、nECAN、nECBP、nECBN、nINOP、nINON 作为MCX314的输入,并且在信号输入端加入高速光电耦合IC (HCPL-M600)将其进行隔离。

图7 编码器三相接口电路
报警及到位等信号接口电路如图8所示,伺服驱动器的如 nINPOS、nALARM 等信号经光耦(LTV-357T)进行隔离后送入MCX314。此光耦隔离IC 用法简单,响应时间短,性能可靠。由于光耦的前端是发光二极管,最大电流不能超过15 mA,为了使通过光耦前端发光二极管的电流恒定,在设计中,除在电路中接入限流电阻外还在相应位置反接了稳压二极管。
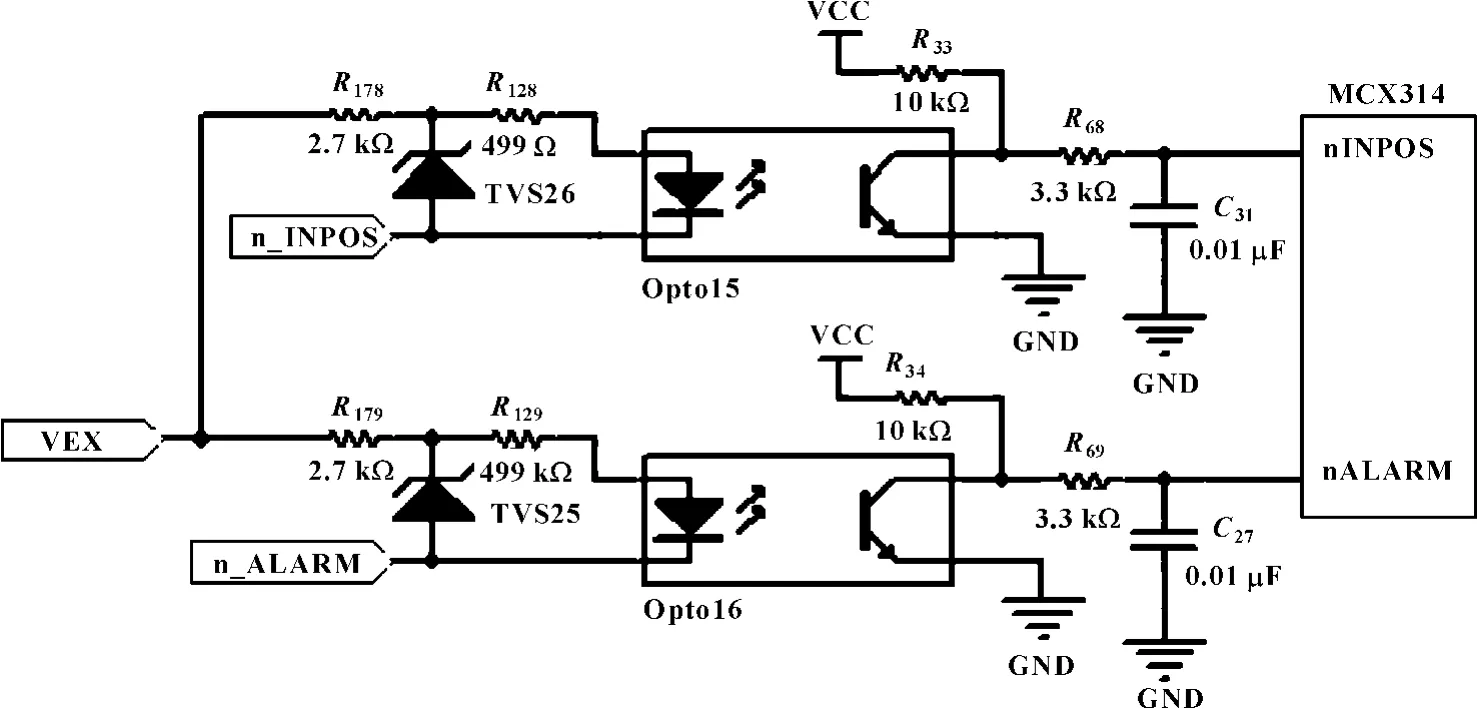
图8 报警及到位信号接口电路
控制卡原理图采用自底向上的设计方法,设计完成后共计10个模块,分别为PCI总线模块、局部总线模块、电源模块、逻辑控制模块、手动模式模块、驱动器接口模块以及X、Y、Z 及U轴控制模块,最后由此10个模块综合成包含输入输出互联的方块电路图。
3 运动控制卡的PCB设计
原理图设计完成并编译成功后便可生成网络表,然后进行PCB的设计。从EMC (电磁兼容)设计的角度出发,PCB 板的EMC设计是EMC系统设计的基础,而PCB 板EMC设计的开始阶段就是层的设置,层设计形式的不合理,就可能产生诸多的噪声而形成EMI 干扰和自身的EMC 问题,所以合理的层布局与电路设计同样重要。
运动控制卡中包含4种电源模块,分别为外部输入的+24 V (用于外部开关量的电源输入)、PCI 插槽提供的+5 V、及由此5 V 经2个DC-DC转换器电源模块转换而来的3.3 V 和5 V,2个DC-DC 电源转换器分别采用AMS 公司的AMS117_3.3 和MINMAX的MAU250系列。板卡中地系统有2个,由电源模块MAU250 隔离。板卡系统中主控制芯片MCX314的工作频率为16 MHz,32位PCI总线时钟频率最高达33 MHz,此两种工作频率尚未达到高速信号的范畴。但考虑到板上电路复杂、电源种类多样、布线空间小、布线密度大的实际情况,最后采用六层板设计,并且采用0.152 4 mm/0.152 4 mm的最小线宽/间距布线。在如表1所示(注:S 代表信号层,G 代表地层,P代表电源层)的6层设计中的4种叠层方案中选择方案3,因为该方案中信号层与地层相邻,平板电容大,有利于电源去耦。另外,信号层与地层相邻,能保证信号有充分的回流面积。

表1 六层板叠层方案
各种多层板卡,中间层的添加方法分为两种,一种是Add Plane (添加电源层、地层),另一种是Add Layer (添加信号层)。Plane层是不能走信号线的,只能敷铜,可以分割,而且在分割的过程中,一种电源是不能被另一种电源完全包围。中间所添加信号层就像顶层底层一样是可以用来布线的,其所画的线就代表一条条的铜线。内电层和信号层相反,它画线的地方就代表没有铜线,相当于说如果这一层没有布线的话,那就说明这一层就是整块的铜皮。所设计的运动卡中,2、4、5 三层采用了Add Plane方法,并且每层都分割为两大部分,隔离线宽为2.032 mm,第3层为中间信号层,这层承担了大部分信号走线。
4 结束语
基于PCI总线的运动控制卡种类繁多,观其结构,有“FPGA+DSP”和“PCI接口芯片+DSP”等模式。焊线机中的运动控制板卡采用“PCI9052+MCX314”模式设计,设计完成后的板卡配合相应软件经调试后,已成功应用于广州科技攻关项目——全自动IC芯片焊线机。
【1】PCI9052 Data Book (Version 2.0).http://plxtech.com.2001.
【2】蔡晓雯.基于运动控制芯片MCX314的运动控制器设计[J].电子器件,2007,30(5):2-4.
【3】王修岩,李宗帅.基于PCI总线和MCX314的多轴电机伺服控制器设计[J].机床与液压,2009,37(6):2-3.
【4】尹勇,李宇.PCI总线设备开发宝典[M].北京:北京航空航天大学出版社,2005.
【5】叶佩青,汪劲松.MCX314 运动控制芯片与数控系统设计[M].北京:北京航空航天大学出版社,2002.
【6】顾海洲,马双武.PCB 电磁兼容技术:设计实践[M].北京:清华大学出版社,2004.
【7】黄书伟.印制电路的可靠性设计[M].北京:国防工业大学出版社,2004.
【8】黄建新.数控切绘机中运动控制卡的研究与开发[D].广州:广东工业大学,2006.
【9】周小华.运动控制技术研究及运动控制板卡开发[D].哈尔滨:哈尔滨工业大学,2003.
猜你喜欢
机电工程技术(2022年8期)2022-09-22
计算机应用(2020年5期)2020-06-07
科技创新与应用(2019年32期)2019-12-02
测控技术(2018年6期)2018-11-25
测控技术(2018年8期)2018-11-25
单片机与嵌入式系统应用(2017年7期)2017-07-31
制造技术与机床(2017年3期)2017-06-23
电子设计工程(2015年8期)2015-02-27
河南科技(2014年16期)2014-02-27
电视技术(2013年11期)2013-07-25