
气动比例控制技术在下肢康复训练中的应用
2013-03-20 08:33王基威韩建海胡传龙
机床与液压 2013年4期
王基威,韩建海,胡传龙
(河南科技大学机电工程学院,河南洛阳471003)
气动比例控制系统的原理是实现系统或元件的控制量(输入)与被控制量(输出)之间线性化,保证控制量和被控制量按给定的比例关系变化,从而实现流量、压力连续变化的高精度控制,最终实现控制要求。近年来,随着材料、电子、传感器及控制理论等科学技术的发展,气动比例控制技术的应用在各领域也得到快速提高。由于空气的压缩性大、黏性小,控制系统可实现流量、压力连续变化的高精度和驱动设备高速运动控制。
文中通过分析下肢康复训练系统原理,搭建实验平台进行实时控制,阐述了气动比例控制技术在下肢康复训练中应用的有效性和优越性。
1 下肢康复训练机器人整体结构
首先设计了下肢康复训练系统的整体机械结构,如图1所示。该机构主要由外部框架、减重机构、重心平衡机构、腿部机构以及跑步机等组成。其中减重机构气动系统主要是根据患者的自身体重及病情轻重,通过连接在绳尾部的气缸来减轻患者的自重,同时通过实验实现减重力恒定。实验过程中,通过外部框架顶端弯管上边的双弹簧及滑轮来实现重心左右变化,通过安装于平行四边形机构的气弹簧来实现重心上下变化,综合作用实现人体重心的平衡。助力腿驱动气动系统主要是将患者的双腿捆绑在腿部机构上,用气压驱动的方式控制髋关节、膝关节来实现仿人行走,从而实现患者的步态矫正。通过整体的调试配合最终实现康复训练的目的。
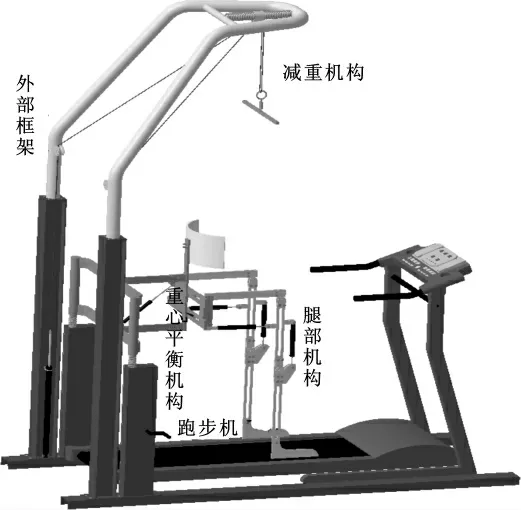
图1 下肢康复训练机器人整体结构
2 减重机构气动系统设计
根据康复理论,在减重支撑训练时保证减重力的恒定对患者的康复效果是最有效的。在减重状态下,当患者按照设定的步态在跑步机上行走时,随着腿部的抬起和下落,自身的重心会发生一定的变化,从而带动钢丝绳上的拉力发生一个随步态变化而变化的力,这个变化的力对于患者的康复治疗效果是不利的。目前康复医疗的减重设备多采用电机驱动的方式来实现减重,而电机驱动存在操作力较大、动作较慢、环境要求较高等缺点;并且存在构造复杂、维护要求高、价格昂贵等不足,利用电机驱动来实现患者的减重训练,其刚性较大,容易对患者产生较大的冲击,可能使人体的肌肉受伤害。而气体的可压缩性使得气压驱动的方式在很大程度上能满足系统的安全性、柔顺性、轻巧性要求。所以文中通过气压驱动的方式来实现减重,同时通过实验实现减重力的恒定,并设计出减重机构气动系统,如图2所示。
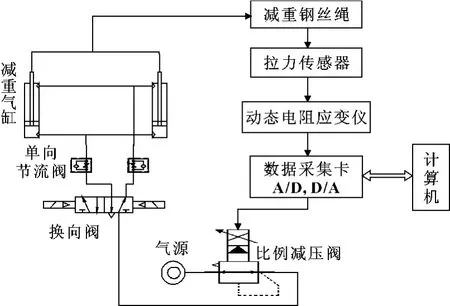
图2 减重机构气动系统原理图
系统的工作原理是:通过并联的两个缸径为32 mm、行程500 mm的气缸连接减重钢丝绳,钢丝绳另一端穿过外部框架上的滑轮,接上蚌埠天光传感器有限公司生产的TJL-1型拉力传感器,患者通过可穿戴式吊带在跑步机上行走时,传感器采集到电压信号经CS-IB 动态电阻应变仪将电压放大,送入USB2009 阿尔泰数据采集卡,最终通过计算机将数据保存处理。减重原理是通过控制电磁换向阀的磁铁断电和带电实现减重气缸的伸缩,通过SMC 公司VY1系列比例减压阀来调节减重气缸的供气压力,控制吊起力的大小,在患者行走过程中,重心随步态上下移动,钢丝绳会随着重心上下移动而拉紧和松开,当拉紧时气缸减压,使钢丝绳松弛些,反之则气缸增压,最终得到相对恒定的减重力。
在该实验中,实验对象是一名75 kg的正常健康男性,试验用跑步机的速度设定为3 km/h,其速度基本为人的正常行走速度。把被测对象安全吊起来,当拉力传感器测到当前拉力后,经应变仪放大,通过数据采集卡做A/D转换后给PC,计算机经过控制算法后做D/A转换,输出一个电压送入比例减压阀,其压力范围为0~0.5 MPa,电压量程为0~5 V,继而驱动气缸动作,最终实现减重力的恒定和动态调整减重系统减重力的大小,最后通过测试程序来保存该数据。为比较实验数据,做了无反馈试验和有反馈实验,通过处理实验数据,得到有反馈和无反馈时的一组实验数据图,见图3。
根据图形显示在5 s 内,一共有7次电压幅值的变化,也就是拉力传感器的拉力值有7个周期变化。分析可知:这正好与正常人行走过程中,人的抬腿与落腿时人体重心随着钢丝绳伸缩成相应变化。分析图3可得:在无反馈条件下,拉力为100~375 N,加入反馈以后,拉力为125~300 N,平均拉力为212.5 N,对于体重为75 kg的健康人来说其减重比例为28%。由此可见,增加反馈以后,减重力的变化范围明显减小,减重力更为稳定,起到了恒定减重力的作用。同时在增加反馈机制以后,曲线变得比较平滑,没有出现电压突变,这对于康复效果也是很有利的。
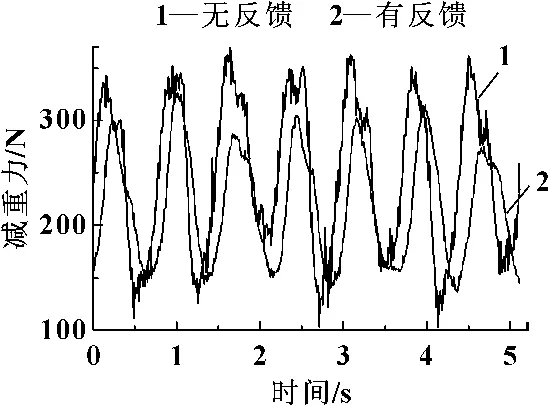
图3 减重力反馈对比实验变化图
3 助力腿驱动气动系统设计
在该实验中,助行腿控制实验的目的主要是为了实现下肢康复训练机器人腿部机构按照设计要求做往复运动,并最终实现仿人行走。该试验平台主要由气缸、费斯托MPYE-5-1/8-LF-010-B 比例流量阀、KTM微型电阻尺、数据采集卡及计算机等元件组成。实验原理是:基于USB2009 阿尔泰数据采集卡,通过控制接在康复训练机器人上的气缸运动从而达到控制关节的运动。经过对助力腿上每个关节的动作控制,以及关节与关节之间的协调控制,达到助力腿能够按照设定轨迹运动,最终双腿能够实现仿人行走,达到康复训练的目的。这里仅以髋关节为例来说明。图4为髋关节气动控制系统的原理图。
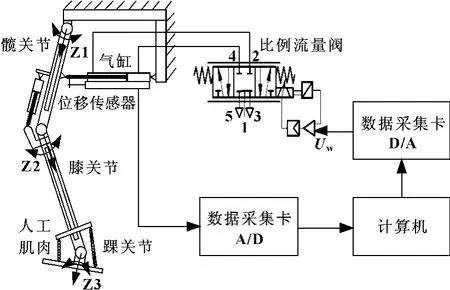
图4 髋关节气动控制系统原理图
助行腿控制实验分三阶段进行,分别是单关节控制实验、单腿双关节控制实验、双腿联动控制实验。文中仅介绍髋关节的控制实验。试验时,空压机连接气缸,电阻尺连接到气缸,并能随着气缸的运动而伸缩。传感器实时的电压信号经过数据采集卡做A/D转换,数据采集卡接入PC机,在PC机内部利用PID控制算法,经D/A 后输出一个电压送入比例流量阀,从而驱动气缸动作,来达到关节控制,从而实现了一个动态跟踪控制。同时通过程序将采集到的数据保存并经数据处理在PC机上作出显示。
在实验中分别设定0.05 Hz 和0.1 Hz的正弦曲线为目标曲线,对步态控制康复训练系统做了髋关节跟踪试验。
从图5、6中不同频率的跟踪轨迹能够看出:在系统响应的整个周期中,基本上能够跟踪预设轨迹,证明了控制策略的有效性和可行性。
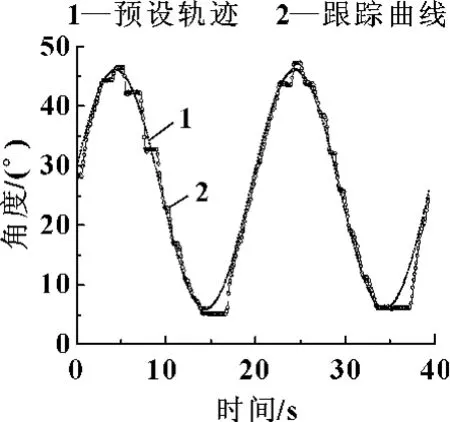
图5 0.05 Hz髋关节跟踪曲线
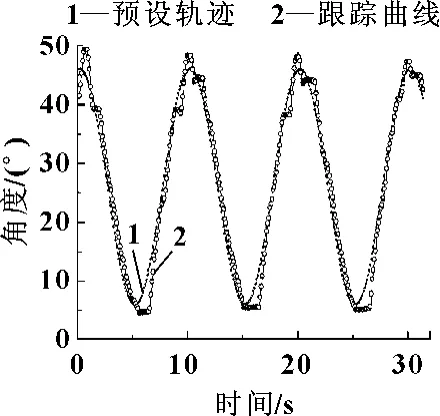
图6 0.1 Hz髋关节跟踪曲线
4 结束语
根据下肢康复训练机器人的设计要求,设计了康复训练机器人的三维实际模型并搭建了完整的实验平台;做了减重力恒定实验和助力腿控制实验,阐明气动比例控制技术在下肢康复训练中应用的有效性;为以后实现基于肌电信号的下肢康复训练机器人整体系统研究提供了依据。并对进一步优化这种新型的下肢康复训练机器人提供了参考。
【1】诸静.模糊控制原理与应用[M].北京:机械工业出版社,1995.
【2】HESSE S,WERNER C,BARDELEBEN A,et al.Body Weight-support Treadmill Training after Stroke[J].Curr Atheroscler Rep,2001(3):287-294.
【3】韩建海,张河新.气动比例/伺服控制技术及应用[J].机床与液压,2001(1):3-6.
【4】刘延俊,李兆文,陈正洪.气动比例位置系统的建模与仿真研究[J].机床与液压,2002(4):56-57.
【5】刘延俊.气动比例位置系统的控制方法及动态特性研究[D].济南:山东大学,2007.
【6】隋立明,包钢,王祖温.一种由气动肌肉驱动的关节模型研究[J].机床与液压,2002(6):55-56.
猜你喜欢
天然气与石油(2022年4期)2022-09-21
北京航空航天大学学报(2021年6期)2021-07-20
装备制造技术(2021年1期)2021-05-21
航空发动机(2020年3期)2020-07-24
模具制造(2019年4期)2019-06-24
测控技术(2018年9期)2018-11-25
发明与创新·中学生(2018年2期)2018-02-07
时代英语·高二(2017年4期)2017-08-11
天津体育学院学报(2016年3期)2016-12-18
科技创新导报(2016年9期)2016-05-14
