透明台阶的白光干涉测量方法研究*
2013-03-20 04:30耿东锋何英杰苏宏毅
光学仪器 2013年6期
耿东锋,何英杰,苏宏毅
(1.中国空空导弹研究院,河南 洛阳 471009;2.红外探测器技术航空科技重点实验室,河南 洛阳 471009)
引 言
随着微制造技术的发展,对于物体表面形貌的检测越来越有必要,各种测试技术也相应发展起来。非接触式光学扫描由于不接触被测物体表面,并且测量范围大、测量所需时间短等优点而得到广泛的应用[1]。Veeco NT3300三维光学轮廓仪就是一种非接触式表面测量设备,它的垂直扫描干涉模式利用白光干涉原理,通过对光程差的调制,从而在零光程差的位置获得最大的条纹干涉对比度,通过相应的算法来重构出被测表面的轮廓,可以用来测量台阶高度和表面粗糙度[2-3]。在利用它对透明台阶进行测量时,由于白光会透过透明体,涉及到二次反射产生附加的光程差,导致了较大的测量误差。本文针对这种情况,结合设备测量原理,分析了误差产生机理,并提出了解决方法。
1 白光扫描干涉法原理
白光光源的辐射包含了整个可见光谱区域的光谱成分,为连续光谱。发生干涉时,各波长将产生各自的一组干涉条纹。当光程差(OPD)等于零(零级条纹处)时,各波长的零级条纹完全重合,随着光程差及干涉级数的增加,各波长的干涉条纹彼此逐渐错开,这种错开会使条纹对比度逐步下降,而到一定程度时干涉条纹消失。
依据白光干涉长度较短的特性,如果使干涉条纹移动,并使其扫描整个被测表面,那么对于被测表面上的任意一个采样点,只有处在零光程差位置时,干涉条纹调制度最大。
Veeco NT3300的VSI测量模式是利用白光扫描干涉方法测量出物体表面的三维轮廓。采用Michelson干涉装置,利用步进马达的进给,实现物镜与被测物体表面距离的变化,从而实现对光程差的调制,最后依据白光干涉的特征,采用质心法提取最佳干涉位置(零光程差),最后获得各点的相对高度,从而重构表面三维轮廓,完成对样品的非接触式测量[4]。
对于白光干涉,干涉条纹光强值可表示为:

上式中,I0为背景光强;γ(Z-Z0)为干涉条纹包络线函数,称为光源相干度;λ0为光源的平均波长;Φ0为初始相位;Z0是参考镜与焦点的距离;Z是被测表面反射点与焦点的距离;光程差ΔZ=(Z-Z0),其中干涉条纹调制度γ(Z)可近似写为:

从式(2)可以看出,γ(Z)在光程差为零(ΔZ=0)处达到最大,并以此为对称轴。
从式(1)、式(2)可知,干涉条纹的光强呈余弦规律变化,干涉条纹的光强值用CCD相机检测并记录下来。物镜在Z轴通过焦点的移动过程中,CCD相机记录所有像素点的光强值,在所有图像中取其中某个像素点的光强值,可以得到该点的光强随ΔZ变化的白光干涉光强相干图,图1所示为白光干涉信号。
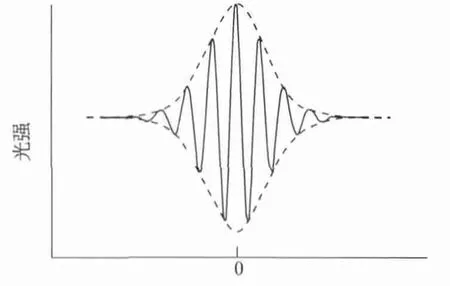
图1 白光干涉Fig.1 Interference of white light
2 测量方法和结果
在探测器芯片制造过程中,光刻胶BP218经过曝光、显影、烘烤后,形成光刻图形。由于工艺要求,需要获得该胶体的厚度,利用轮廓仪进行测量,测量区域选择芯片中间的划片线,可以把它看成一个相对白光透明的台阶。在测量的过程中,设定不同的扫描长度,发现与利用接触式台阶仪测量结果的误差较大,表1是用两种测量仪对同一个透明台阶进行测量得到的测量值。

表1 测量结果比较Tab.1 Comparison of measuring results
3 测量过程分析
对于所测量的划片线区域,如图2、图3所示,在对该台阶进行测量过程中,随着物镜的向下移动,首先在台阶上表面出现零光程差,然后物镜继续向下移动,会在基底的表面也出现零光程差,整个过程中,CCD记录所有采样点的光强值。
当在基底表面形成零光程差以后,系统应该结束测量,物镜就不再向下移动。而控制物镜在Z轴移动的范围,是由测量开始之前测量参数的设定而决定的。通过设置以焦点为基准,向上和向下扫描长度,控制物镜在Z轴移动,使样品不同高度的测量点都会出现零光程差位置。图4为扫描长度的设定。
在对台阶的测量过程中,测量光束覆盖整个测量区域,包括双面台阶的两个表面,白光透过光刻胶后,在胶与基底的界面反射,也会与参考光路之间形成光程差。
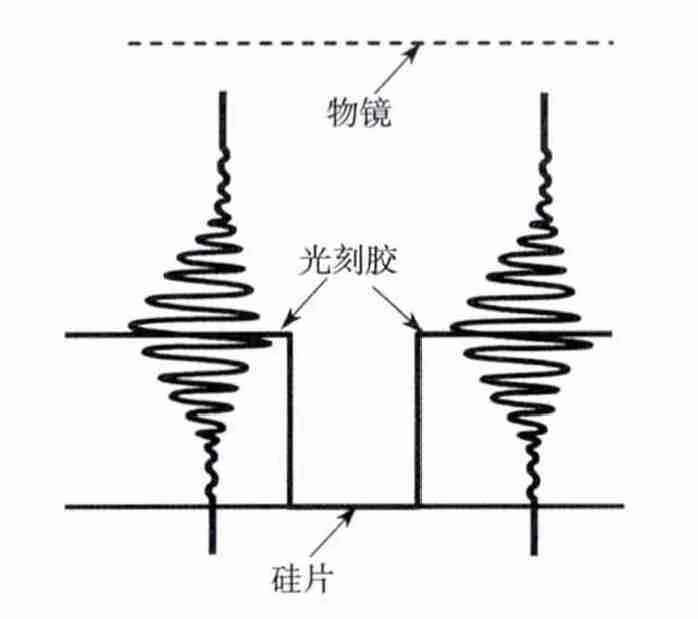
图2 台阶上表面处于零光程差位置Fig.2 The position of step upper surface

图3 硅基底表面处于零光程差位置Fig.3 The position of Si upper surface
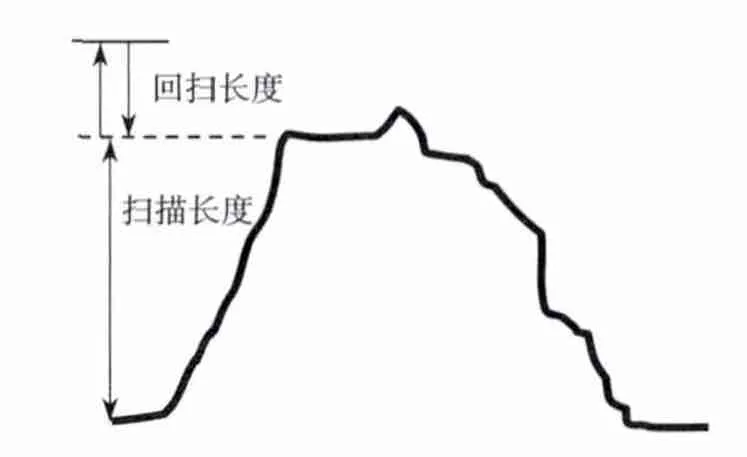
图4 扫描长度的设定Fig.4 The enactment of scan length

图5 台阶下表面处于零光程差位置Fig.5 The position of step lower surface
当经过物镜的移动,基底表面处于零光程差位置,这时ΔZ=n0d1-n0L=0,其中n0是空气折射率,d1是被测点与物镜之间的几何距离,L是参考镜与物镜之间的距离,它是一个定值。而这时,胶与硅基底界面处,由于光线反射所产生的光程差为:

其中n1为光刻胶的折射率,d2为光刻胶的几何距离。因为n1>n0,所以ΔZ≠0,该界面没有处于零光程差位置。
如果物镜继续向下移动Δd,当满足下面这个条件时:ΔZ=n1d2+n0(d1-Δd-d2)-n0L=0,即当Δd=(n1/n0-1)d2+d1-L时,光刻胶与基底界面处于零光程差位置,出现了明亮的干涉条纹,而CCD也会记录该面上的光强值。
物镜在透明台阶底部出现干涉条纹(第二次零光程差位置)后,继续向下移动而在胶体与基底的界面再次出现干涉条纹(第三次零光程差位置),如图6所示。
系统在进行数据处理时,会将两次记录的光强值叠加到一起。作为台阶上表面的光强值,由于出现第二次干涉条纹后物镜又向下移动Δd,则系统认为该界面是在基底以下的位置,在高度重构时,形成误差,使测量值小于真实值。
4 问题解决
测量误差是由于物镜在出现第二次干涉条纹后继续向下扫描造成的,所以可以设定物镜向下扫描长度,使系统在出现第二次干涉条纹后停止扫描。这个扫描长度在满足透明台阶所有点都经历过零光程差位置的前提下,不会产生由于透明台阶和基底界面上的反射引入的干扰光强。
在对透明台阶的测量过程中,首先要进行几次预测量,在扫描过程中观察干涉条纹的变化。当干涉条纹从台阶上表面出现,随后在硅片上再次出现后,如果物镜继续向下移动,直至在透明台阶与基底界面再次产生干涉条纹,说明该扫描长度设定值过大,需要减小扫描长度设定值。通过几次修正设置,直至最后确定一个合适的扫描长度,确保在出现第二次干涉条纹后,系统结束扫描。一般这个设定值是所测量距离的1.2倍,表2是通过设置合适的扫描长度得到的测量值。

图6 多次干涉条纹出现的位置Fig.6 The position of interference fringes
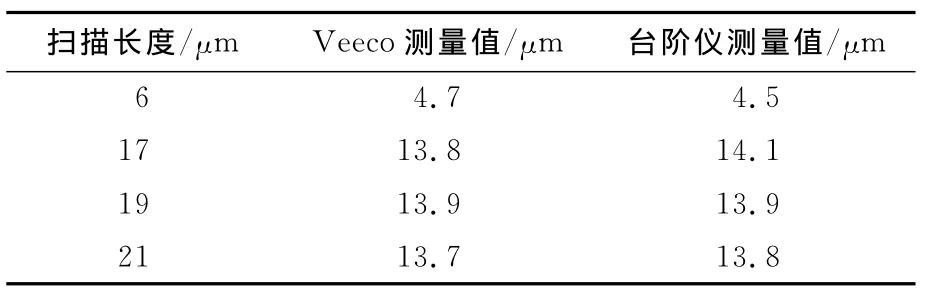
表2 测量结果比较Tab.2 Comparison of measuring results
5 结 论
针对在透明台阶测量中,出现测量误差较大的现象,经过分析,是由于测量光路在透明台阶与基底交界面处发生了二次反射,形成了零光程差,从而引入了误差光强,导致了测量误差。通过设置合适的扫描长度,测量误差减小,获得了可信的测量结果,满足了测量要求。这种测量方法也拓宽了轮廓仪的使用范围。
[1]尚 妍,徐春广.光学非接触廓形测量技术研究进展[J].光学技术,2008,34:216-217
[2]徐德衍,林尊琪.光学表面粗糙度研究的进展与方向[J].光学仪器,1996,18(1):32-37
[3]徐德衍,林尊琪.光学表面粗糙度研究的进展与方向(续)[J].光学仪器,1996,18(2):35-41
[4]孙艳玲,谢铁邦.基于垂直位移扫描工作的表面轮廓综合测量仪[J].湖北工业大学学报,2005,20(5):125-127
猜你喜欢
科普童话·学霸日记(2021年11期)2021-05-30
天文研究与技术(2019年4期)2019-10-23
光学精密工程(2016年4期)2016-11-07
光学精密工程(2016年3期)2016-11-07
照明工程学报(2016年3期)2016-06-01
连环画报(2016年4期)2016-05-05
中国房地产业(2016年9期)2016-03-01
应用光学(2015年3期)2015-06-10
物理实验(2013年3期)2013-08-25
深圳信息职业技术学院学报(2013年3期)2013-08-22