双PSD实现长直导轨四自由度测量的新方法*
2013-03-20 04:30:08柳常清孙占文吴韩飞
光学仪器 2013年6期
柳常清,宋 庆,孙占文,吴韩飞
(1.长春理工大学 机电工程学院,吉林 长春 130022;2.哈尔滨工业大学 机械工程与自动化学院,黑龙江 哈尔滨 150001)
引 言
位置敏感探测器件(PSD)是一种基于非均匀半导体“横向光电效应”的、对照射到其光敏面上的入射光或粒子位置敏感的光电测距器件。由于PSD具有位置分辨率高、响应速度快、可靠性高、后续处理电路简单等优点,因此在位置 、位移等相关量的非接触精密检测中获得了越来越广泛的应用[1-3]。然而,由于PSD输出的电流信号与位置坐标之间存在一定的非线性关系,这在一定程度上限制了它的应用[4-5]。
目前,市场上有关直线导轨物理量测量的检测系统,如XL80激光干涉仪,其测量大都是建立在检测附件重新组合的基础上分别予以实现的,而所需检测附件的再组合在一定程度上降低了工作效率,影响了测量精度。鉴于此,本文将着重介绍一种由半导体准直激光器、双二维PSD、光学器件、信号处理电路、A/D采集卡和计算机等组成的测量系统,其可实现直线导轨四个自由度的同时在线测量。因其克服了以往需要进行附件重组才可分别实现直线导轨空间偏角和空间直线度测量的缺点,且对激光空间偏角进行了修正,又引入了神经网络算法和互相关技术对PSD的非线性和背景光进行了修正和消除,故缩短了测量周期,提高了工作效率和测量精度。
1 系统测量原理
1.1 测量原理概述
系统测量原理如图1所示,系统由半导体激光器LD、单模光纤等组成,其中偏振分光镜PBS和分束分光镜的法线方向与水平线成45°,PSD-2光敏面位于会聚透镜的焦平面上。激光驱动电路使LD触发产生一束部分偏振光,经单模光纤准直、准直透镜扩束及偏振分光镜PBS分束,变成线偏振P光[6],射向移动部分;线偏振P光经1/4波片,偏振方向改变45°,平面镜反射回来再次经过1/4波片又改变45°,至此偏振方向已旋转90°变成S光并入射至偏振分光镜;经偏振分光镜和分束分光镜的反射,一束激光打在PSD-1的光敏面上,经后续信号处理电路和A/D采集卡,便可输出一个二维位置坐标(x1,y1);经偏振分光镜的反射、分束分光镜的透射以及会聚透镜的聚光,另一束激光打在PSD-2的光敏面上,同样经后续信号处理电路和A/D采集卡,便可输出另一个二维位置坐标(x2,y2)。直线导轨的俯仰角和偏摆角可由PSD-2的输出坐标予以表征,经过计算机的处理即可输出二者的误差值;直线导轨的二维直线度误差可由PSD-1的输出坐标予以表征,通过利用PSD-1和PSD-2的输出坐标可以实现激光空间偏角的修正,进而经过计算机的处理即可输出二维直线度误差值。

图1 系统原理示意图Fig.1 System schematic diagram
1.2 导轨俯仰角、偏摆角的测量原理
当导轨运动副沿直线导轨移动时,三维平移和滚转角对反射光线无影响,故反射光路仅取决于俯仰角和偏摆角[7-8],有效实现了误差的分离,因此利用坐标变化建立反射镜、会聚透镜和PSD-2三者之间的空间坐标系,如图2所示,设准直激光入射方向I0与反射镜法线方向N0均为[00-1],则当导轨运动副绕x、y、z分别有俯仰角α、偏摆角β、滚转角γ时,其旋转矩阵分别为:
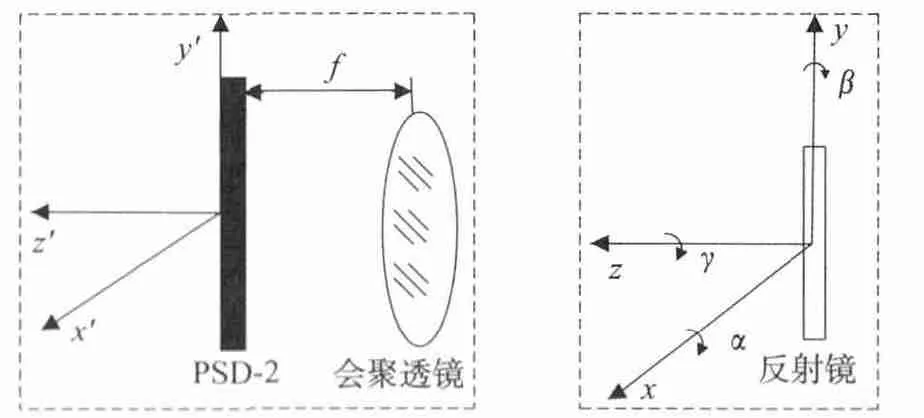
图2 角度测量原理图Fig.2 Principle diagram of angle measurement

旋转后,平面反射镜的法向方向为:

因俯仰角α、偏摆角β、滚转角γ均为微小角,由泰勒公式可将其简化为:

故平面反射镜的反射矩阵为:

反射光线矢量为:

PSD-2光敏面得到的成像位置为:

其中f为会聚透镜的焦距。
1.3 基于激光空间偏角修正的直线度误差测量原理
由图1可知,当平面反射镜偏转ω/2角度时,其反射光线及其入射至PSD-1、PSD-2光敏面的实际光线亦将偏转ω角,且该反射光线平行于入射至PSD-1光敏面的实际光线。则平面反射镜反射光线的方向矢量为:

PSD-2与聚光透镜的实际光路如图3所示,可得PSD-1光敏面法线方向与实际准直入射激光所形成的空间偏角ω可表示为:

记I0的单位向量为e= [m np],其中m=x2cosω/f,n=y2cosω/f,p=cosω。
由于PSD光敏面法线方向平行于入射准直激光是偶然的,在实际测量中不平行即二者间存在一空间偏角是经常存在的,这一空间偏角致使PSD的实际输出坐标不能真实反映被测量的值,故需要对空间偏角予以修正,这可通过三维齐次坐标变换来实现[9]。
因入射准直激光束N0与反射镜反射光线的单位向量e均已知,所以旋转轴AB的方向矢量q为:

图3 PSD-2与会聚透镜的实际光路图Fig.3 Actual light path of PSD-2and convergent lens


根据绕任意轴的三维齐次坐标变换,可知平移矩阵T为:

绕x轴、y轴、z轴的旋转矩阵为:


图4 激光空间偏角的修正Fig.4 Correction of laser space angle

旋转前点P位于以e= [m n p]为单位法向量的平面τ上,即有mx+ny+pz=0为包含点P的平面方程,所以点P旋转前的竖坐标为:zP=-(mxp+nyp)/p,故点P旋转后的坐标为:

即校正后的坐标为:

其中(x1,y1)为实际入射至PSD-1光敏面光斑能量重心坐标,(x′1,y′1)为经校正后的输出坐标。
采样过程中,导轨运动副沿着直线导轨移动,采集若干个采样点的经校正后的输出坐标,借助MATLAB软件绘制导轨实际曲线图,利用最小二乘法即可获取被测直线导轨的二维直线度。
2 测量系统设计
2.1 系统设计
二维PSD是本系统所采用的核心传感器件,当有准直激光入射到其光敏面上时,四个电极会有电流输出;信号处理电路接收此电流并进行电流-电压的转换和放大处理后,送至A/D采集卡,A/D采集卡将模拟信号转化为数字信号,然后通过相关软件的分析即可显示处理结果。因此,本系统的设计主要包括PSD、信号处理电路、A/D采集卡的类型选择以及利用相关软件进行数据处理与显示等部分。
二维PSD选择S1880型号,A/D采集卡选择PCI8602型号,采集程序及人机交互式界面采用MATLAB和LabVIEW实现,信号处理电路框图如图5所示。

图5 信号处理框图Fig.5 Block diagram of signal processing
2.2 测试布局
测量系统的布局如图6所示,通过水平仪调节精密三角支架至合适高度并保持水平,将固定部分2通过磁性底座置于其上,微调俯仰角度至入射激光基本垂直于反射镜3,并以探测器件的初始输出坐标为参考基准。测量过程中,导轨运动副沿着直线导轨连续移动,由光栅尺4测量其位移量,进行等间隔连续采样。

图6 测量系统布局Fig.6 Layout of the measurement system
3 测量结果与分析
实验测量结果表明,当所采用的二维PSD具有1μm的分辨率、会聚透镜焦距为550mm时,角度测量精度可达0.3″,直线度测量精度可达3.2μm/m。
系统的测量精度受到PSD非线性和背景光等因素的影响,故本检测系统首先将PSD置于精密工作台上并利用插值法进行了标定,利用神经网络对其非线性进行了修正,以及利用互相关技术消除了暗电流的影响,因而具有较高的测量精度。
4 结 论
本文介绍的基于双二维PSD实现长直导轨四自由度在线测量的检测系统,具有测量精度高、位置分辨率高、自动化程度高、安装简便等特点,不仅可以实现对长直导轨连续、全貌、快速实时测量,而且降低了人为操作带来的误差,提高了测量效率和精度。
[1]张广军.PSD器件及其在精密测量中的应用[J].北京航空航天大学学报,1994,20(3):259-261.
[2]曾 超,李 峰,徐向东.光电位置传感器PSD特性及其应用[J].光学仪器,2002,24(4/5):30-33.
[3]陈冬亚,林 斌,陈钰清.位置敏感器件(PSD)的研究发展[J].光学仪器,2004,26(4):68-71.
[4]袁红星,王志兴,贺安之.PSD非线性修正的算法研究[J].仪器仪表学报,1999,20(3):271-274.
[5]李忠科,秦永元,郭 强.人工神经网络在二维PSD器件非线性修正中的应用[J].计算机测量与控制,2004,12(5):461-463.
[6]杨永江.横向调制线偏振光测量导轨直线度的方法研究[D].西安:西安理工大学,2008.
[7]刘兆栋,韩志刚,于丽娜,等.基于PSD的导轨直线度测量[J].东南大学学报,2009,39(增刊):65-69.
[8]刘 斌.偏摆角、俯仰角测量方法及实验的研究[D].北京:北京交通大学,2005.
[9]曹国华.大型机组轴系激光对中精密检测技术研究[D].长春:长春理工大学,2008.
猜你喜欢
新能源科技(2022年9期)2022-11-20 19:28:56
计量学报(2022年7期)2022-08-23 09:23:24
环境技术(2020年1期)2020-03-06 11:41:02
制造技术与机床(2018年12期)2018-12-23 02:41:02
制造技术与机床(2017年6期)2018-01-19 02:41:19
制造技术与机床(2017年8期)2017-11-27 02:09:58
光学精密工程(2016年6期)2016-11-07 09:07:15
光学精密工程(2016年1期)2016-11-07 09:01:50
重型机械(2016年1期)2016-03-01 03:42:06
时代农机(2015年3期)2015-11-14 01:14:59