硅棒特征点三维坐标视觉检测技术研究*
2013-03-20 04:31:04侯宏录
光学仪器 2013年2期
侯宏录,王 敏
(西安工业大学 光电工程学院,陕西 西安 710021)
引 言
硅棒的实际尺寸参数与硅棒本身的特征点提取密切相关,获取硅棒特征点的三维坐标信息可有效反映硅棒尺寸参数和产品质量,为产品的质量监控提供依据[1]。然而针对硅棒,无论是整体尺寸还是局部特征的检测,国内目前尚无相关仪器,在我国这些参数的检测还主要是依靠人工完成[2]。人工检测是一种非在线、接触式的传统检测方式,采用直角尺、游标卡尺、钢板尺等工具进行检验,检测精确度和重复性受到检测人员工作状态干扰,很难保证统一标准,总体上来说检测速度和检测精度不高;同时接触式检测过程中需反复搬动样品不可避免地造成对样品的二次伤害,效率低,仪器损耗大[2]。结合视觉成像技术和图像处理技术出现的机器视觉检测技术,不仅摒弃了传统检测方法的不足,满足了实时检测要求,同时还具有非接触、精度高等优点,是现场实时三维坐标测量的首选方法之一[3-5]。
国内外关于三维坐标的相关测量方法主要有:电子经纬仪法和三坐标测量机法[3]。坐标测量机的测量精度可达微米级,但是庞大的机身、厚重的底座、复杂的操作以及昂贵的成本限制了其现场的应用[4];经纬仪、激光跟踪仪便携性好,但采用多点对准,效率低,不适合于现场在线检测[5]。机器视觉检测系统组建非常灵活,既可由单目视觉测量系统构成,亦可选择双目甚至多目视觉测量系统搭建而成。因为单目视觉测量三维空间坐标测量不确定度偏差较大[4],所以选择由四CCD构成的多目视觉系统,该多目视觉检测系统中,相邻的两CCD构成正交双目交汇视觉测量子模块系统,基于双目视觉原理的子模块克服了单目视觉检测的缺陷,精度更高。该多目机器视觉系统在保证较高精度的前提下,作为机器视觉前端采集系统,实现了硅棒全范围大尺寸轮廓检测,检测效率和速度较高。
1 硅棒坐标检测机器视觉系统组成
典型的基于机器视觉的硅棒坐标检测系统组成如图1所示:
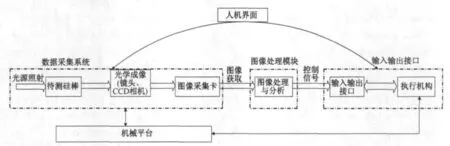
图1 机器视觉的坐标检测系统组成Fig.1 The design of machine vision for coordinate detection system
硅棒坐标测量系统主要包括上位机界面、数据采集模块、图像处理模块、输入输出接口以及机械搭建平台组成。上位机作为人机交互平台负责数据显示和存储,总体管理数据采集模块和图像处理模块。数据采集系统作为机器视觉检测的核心之一完成硅棒轮廓信息图像采集,涉及光源、镜头、CCD相机以及图像采集卡,采集系统工作流程为:光源照射待测硅棒,CCD相机采集图像信息经过图像采集卡将图像信息转换为数字信息送入上位机并实时保存起来。数据采集完成之后,图像处理模块读取图像通过相应算法提取特征点最终计算特征点空间三维坐标。图1还可以看出整个数据采集模块搭建在机械平台上由执行机构驱动,不仅可以实现待测目标的小范围检测,同时还可以配合机械平台运动,驱动数据采集系统实现待测物体的大范围全尺寸检测。
2 硅棒特征点三维坐标检测原理
2.1 四目视觉全范围检测系统组成
硅棒特征点坐标视觉检测技术基于四目视觉原理,整个四目视觉系统作为机器视觉检测系统的数据采集模块负责为后续图像处理模块提供硅棒图像信息,采集的图像质量直接影响到后续图像处理的难易程度和结果的计算精度。四目视觉原理如图2所示:数据采集模块由四台CCD相机组成,分别在待测硅棒每个侧面安装一台CCD面阵相机,保持相机与硅棒待测面垂直放置,在自然光源照射下硅棒表面成像于与之垂直的CCD相机上,则相机分别获得每个硅棒表面特征的图像。该图像可以通过一个四路camelink接口图像采集卡或者2个双路camelink接口图像采集卡送入上位机进行后续图像处理。整个数据采集系统要实现的功能就是确保不降低系统检测精度的前提下,维持尽量大的有效视场范围,实时采集获取清晰的硅棒图像。
2.2 四目视觉系统视场约束
为了实现最优检测目的,必须保证待测硅棒在检测过程中始终处于四目视觉系统的有效视场范围内,若硅棒对应于相机上像点的坐标为(xi,yi),通过针孔模型透视变换公式就能得出某个特征点在有效视场内的世界坐标为OXWiYWiZWi。图3为四目视觉系统有效视场示意图,以四台CCD交汇中心建立世界坐标系。

图2 四目视觉系统组成Fig.2 The composition of the 4CCDs vision system

图3 四目全范围检测原理及有效视场分析Fig.3 The principle and the analysis of effective vision field for 4CCDs′full range detection


由式(1)可知:CCD相机间基线长度B、视场角β以及相机夹角α这三个参数不仅直接限制有效视场的大小,还会严重影响四目视觉系统的测量精度。引起测量精度的误差包括相机本身参数(Tx、Ty)以及相机分布结构参数、参数本身的测量误差(B、f)[6],它们共同决定了机器视觉采集系统的精度。
2.3 双目交会原理
如图2可知:四目视觉系统中的任意相邻的两个CCD构成双目交汇视觉测量系统,所以整个四目视觉系统可以看作四个双目交汇视觉子系统组成,其中CCD-1和CCD-2构成子系统1,CCD-2和CCD-3构成子系统2,CCD-3和CCD-4构成子系统3,CCD-4和CCD-1构成子系统4。因为每个子系统光轴互相垂直,所以子系统基于正交双目交汇视觉原理。正交双目交汇测量比单目测量准确度高,它的相机夹角2α=90°有效降低安装误差[7],保证基线长度,形成相对较大的有效视场利于实现大尺寸检测,同时α=45°满足α∈(40°-70°)放置时测量误差最小要求[4]。
以双目交汇视觉子系统1为例:CCD-1和CCD-2分别满足针孔成像模型:

其中矩阵M是由相机内部参数(r1~r9)和相机外部参数(T1~T3)构成的一个3×4的综合矩阵。联立式(2)和式(3)求解则可得到CCD-1和CCD-2的采集图像上的公共特征点的三维坐标,即硅棒第1对棱边上的特征点坐标,同理对于双目交汇视觉子系统2、双目交汇视觉子系统3、双目交汇视觉子系统4可依次求得第2对、第3对、第4对棱边上的特征点坐标,从而在保证精度前提下实现硅棒全范围检测目的。
3 硅棒特征点三维坐标检测方法的实现
为了验证硅棒特征点三维坐标视觉检测系统的可行性,在实验室搭建了机器视觉检测试验样机进行试验,完成四目视觉采集系统的相机标定实验,同时以CCD-1和CCD-2构成的正交双目子系统为例进行一对硅棒表面图像的数据采集实验,基于Visual Studio 2008平台编写核心图像处理算法。
3.1 标定实验
相机标定是视觉测量过程中不可缺少的关键技术,标定通过针孔成像原理求取相机内部属性参数和外部位置参数从而确定空间坐标系中物点和像点的对应关系[8]。针对本文的多目视觉系统首先对每个相机进行单目标定。单目标定选择一种介于传统标定技术和自标定技术之间的方法:张氏平面标定法。标定流程为:首先将自制一个大小为11×11标准棋盘格模板,每个棋盘格大小为10mm×10mm。该模板置于视觉系统有效视场内,改变模板位置多角度(不小于3个)分别拍摄,拍摄完成后进行角点检测,单应性矩阵求解和参数优化,每个CCD获得一个相应的相机标定文件calib_CCD_1.mat、calib_CCD_2.mat、calib_CCD_3.mat、calib_CCD_4.mat。这种标定方法比传统标定简单,算法计算量减少且精度高于自标定方法。通过单目标定得到X方向和Y方向有效焦距(ax,ay)、CCD靶面中心坐标(u0,v0)以及径向或者切向畸变等相机内部参数,由于切向畸变较小,此处忽略不计,主要考虑径向畸变参数(k1,k2),单目标定结果见表1。
单目标定完成之后进行立体标定,分别获得相机坐标系O1Xc1Yc1Zc1、O2Xc2Yc2Zc2、O3Xc3Yc3Zc3、O4Xc4Yc4Zc4相对于世界坐标系的旋转矩阵R和平移矩阵T。立体标定结果见表2。

表1 单目相机标定结果Tab.1 The result of monocular camera calibration
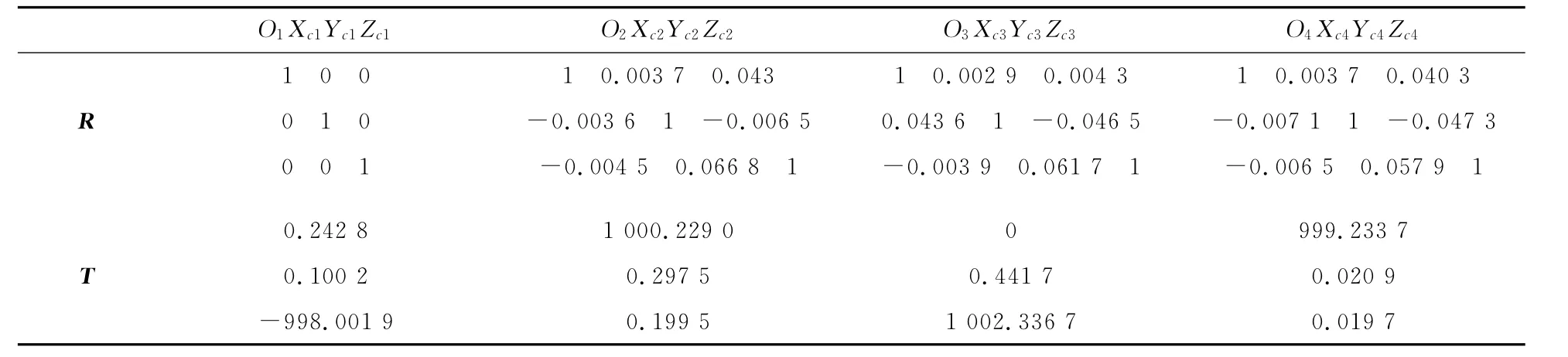
表2 多目相机标定结果Tab.2 The result of multi-camera calibration
3.2 图像采集实验
实验采用四个IMPERX面阵CCD相机、相机配接15mm的标准镜头,两个X64-CL Prio图像采集卡,两个镜头基线距离为1408.6mm搭建实验样机,有效线视场为236.544mm,将待测硅棒置于CCD交汇的有效视场范围内,配置图像采集卡输出格式为Cameralink Base Mono#1,导入IPX_VGA210相机.cfg配置文件,通过X64-CL Prio图像采集卡将一对像素为640×480黑白硅棒图像实时送入上位机。其中正交双目视觉子模块1采集到的一对图像如图4所示。
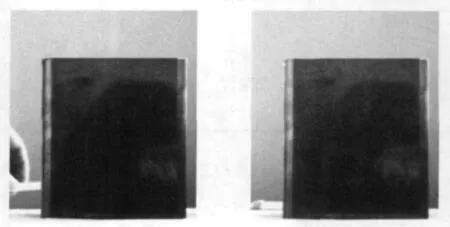
图4 硅棒图像Fig.4 Images of silicon rods
3.3 图像处理
特征点坐标检测视觉系统第二个核心组成是图像处理模块,该模块通过完成对采集数据的后续图像处理获得目标特征点的三维空间坐标,技术难点在于机器视觉数据采集模块中CCD相机得到的是二维图像信息,而系统最终要求是得到目标特征点的空间三维坐标。针对问题论文提出一种二维图像上恢复特征兴趣点三维坐标的解决方法:首先提取待处理图像上的特征兴趣点,建立特征兴趣点对应关系即同名点识别,接着通过同名点立体匹配获取对应点视差从而得到特征兴趣点3D坐标。
3.3.1 Harris角点检测
论文以硅棒角点作为研究的特征兴趣点,采用一种基于灰度值相关的角点检测算子:Harris算子进行硅棒角点检测。Harris角点检测的目的是提取待测目标的特征点,依靠特征点来传递图像所表征的参数信息,算法不受相机姿态及光照影响,检测精度达到像素级别[9]。Harris算子数学表达形式为:

M为自相关联系矩阵、Det(M)为自相关矩阵行列式的值,Trace为矩阵的迹,k为默认常数,取0.04。式(5)称为Harris算法响应函数,该函数给出局部范围内的兴趣值大小。Harris算法采用局部范围内的极大兴趣值对应的像素点作为特征点,因此通过对算法中的门限阈值、局部邻域大小、高斯窗口大小和高斯方差多次调整,保证在局部邻域内只留下最大极值点作为兴趣点,实现特征最优角点的提取。
3.3.2 特征点立体匹配
特征点立体匹配就是在待匹配图像上寻找标准图像上每个特征点的同名点,从而将不同图像中原本独立的特征兴趣点联系起来[10-11],特征点匹配不是盲目进行,它遵循一定约束条件,本文同名点匹配基于极线约束。极线约束规定了一幅图像上任意一点在另一幅图像上的对应点只可能位于一条特定的极线上,通过该约束特征点匹配搜索空间从二维降为一维,减少计算量[10]。匹配流程为:
首先在现有图像中设定一个标准图像,对于标准图像中的特征点Pl,找出待匹配图像中与其有最近欧氏距离的前两个特征点Pr1和Pr2,计算两个特征点中最近的距离Dmin与次近的距离Pcmin的比值,如果该比值小于匹配阈值,则表示待匹配图像上欧氏距离最近的点是标准图像中Pl特征最优匹配点。
其次以待匹配图像中Pr1为特征点,重复步骤1的过程,求取标准图像中Pr1的候选匹配点P′l。
最后如果Pl和P′l是相同点,则Pl和Pr1匹配成功,否则弃之。重复这个流程,直到匹配完成。
同名点匹配完成之后,由双目视觉视差公式即可得出特征点3D坐标。最后对采集系统拍摄的两幅硅棒图像进行角点检测及匹配算法验证,获得了图像中的4对公共角点3D点坐标值,结果见表3。

表3 特征点3D坐标计算结果Tab.3 The calculation result of characteristic points′3Dcoordinate mm
通过表3可以看出:理论计算结果和实际测量结果基本吻合,且实际测量精度明显高于理论计算精度。
4 结 论
论文提出一种基于机器视觉的非接触、实时硅棒特征点检测技术,搭建了多目视觉硅棒采集系统进行图像采集实验,重点研究了多目视觉有效视场确定和正交双目交汇视觉测量原理,基于Visual Studio 2008平台完成了硅棒角点特征提取以及同名角点立体匹配等后续图像处理算法,整个检测过程时间不超过0.5min。实验结果表明,该技术可准确快速获取待检测硅棒的特征点三维坐标,检测精度可以达到像素级别,适合于硅棒参数的非接触式高精度检测。为下一步开展硅棒面形检测研究奠定了基础。
[1]郭海霞,解 凯.焦点检测技术研究[J].哈尔滨师范大学自然科学学报,2007,23(2):73-75.
[2]徐岳生,刘彩池,王海云,等.直拉硅的现状与发展[C]∥中国有色金属学会第六届学术年会论文集.长沙:中南大学出版社,2005:62-69.
[3]彭 凯,刘丽冰.双摄像机光学三坐标测量系统的研究[J].工艺与检测,2008,10(9):115-117.
[4]彭 凯,刘丽冰,刘书桂.基于双相机的计算机视觉坐标测量系统[J].光电工程,2008,35(7):95-98.
[5]管业鹏,童林夙.双目立体视觉测量方法研究[J].仪器仪表学报,2003,24(6):581-588.
[6]刘佳音,王忠立,贾云得.一种双目立体视觉系统的误差分析方法[J].光学技术,2003,29(3):354-360.
[7]郭玉波,姚 郁.双目视觉测量系统结构参数优化问题研究[J].红外与激光工程,2006,35(增刊):506-509.
[8]罗世民,李茂西.双目视觉测量中三维坐标的求取方法研究[J].计算机工程与设计,2006,27(19):3622-3624.
[9]张春生.基于点特征匹配的SUSAN-Harris算子比较[J].西安科技大学学报,2007,27(4):608-616.
[10]陈凌峰,杨银才,沈邦心,等.机器视觉测量系统中的特征匹配方法[J].湖北工业学院学报,2000,15(4):26-29.
[11]张少辉,沈晓蓉.一种基于图像特征点提取及匹配的方法[J].北京航空航天大学学报,2002,34(5):516-519.
猜你喜欢
中国光学(2021年6期)2021-11-25 07:48:32
汽车维修与保养(2020年11期)2020-06-09 05:42:16
电子制作(2019年20期)2019-12-04 03:51:38
中国医疗设备(2019年1期)2019-01-15 12:10:54
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年3期)2016-11-07 09:03:34
现代计算机(2016年11期)2016-02-28 18:35:20
激光与红外(2015年10期)2015-03-23 06:07:18
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10 02:35:38
机械与电子(2014年2期)2014-02-28 02:07:46