
近室温样品加热炉温度的模糊PID控制研究*
2013-03-20 04:31陈文建
光学仪器 2013年2期
何 茜,韩 军,陈文建
(1.西安工业大学 光电工程学院,陕西 西安 710021;2.西安应用光学研究所,陕西 西安 710065)
引 言
光谱发射率及定向发射率是研究红外隐身材料性能隐身性能的重要指标。红外隐身材料的光谱发射率的测量主要集中在大气窗口8~14μm内,对应的温度范围约为-30~70℃。能量对比法是目前广泛采用的精度较高的光谱发射率测量法,该方法依据发射率的定义在同一温度下用同一探测器分别测量绝对黑体及样品的光谱辐射功率,两者之比就是材料的光谱发射率值[1-2]。采用能量法进行材料光谱发射率测量时,需要根据不同的温度范围设计不同结构的样品加热炉,再根据不同的样品加热炉的加热体特性设计相应的温度控制方法。样品加热炉的温控控制精度直接影响到最后的测量结果。
实验表明,在近室温范围内,当标准黑体炉与样品加热炉的温差为2℃时,测量结果的相对误差会增加1%[3]。针对这一问题文中提出了一种基于半导体制冷器的近室温样品加热炉系统,对于这样一个工作在近室温范围内的加热炉系统,系统具有很大的非线性、滞后性以及时变性,采用传统的PID算法很难用理论建立精确的数学模型。本文采用模糊算法与PID算法相结合的算法,该算法既具有模糊控制灵活而适应性强的优点,又具有PID控制精确度高的特点。
1 样品加热炉设计
近室温样品加热炉要求系统具有高的测量与控制精度和高的稳定性。根据近室温样品加热炉温度测量和控制的技术要求,系统共分为两部分:样品加热炉结构模块、温度控制模块[4]。
1.1 结构设计
1.1.1 半导体制冷器
半导体制冷器是一种热电制冷器(Thermoelectric cooler),它是由半导体按照特殊的结构组成的一种加热制冷装置,能集加热与制冷为一体。基于半导体制冷器的样品加热炉系统无需将加热与制冷分离。半导体制冷技术主要是帕尔帖效应在制冷技术方面的应用,能量在两材料的交界面处以热的形式吸收或放出,这种吸收或放出的热量通常叫做帕尔帖热。从热端到冷端的传导热为:

其中:K为半导体制冷器的导热率;T1,T2为半导体制冷器热端和冷端的温度。
常规的半导体制冷器两端的温差约为60~70℃,特殊情况下可达到150℃。针对半导体制冷器的这一特性,文中选用半导体制冷器作为样品加热炉的加热体。半导体制冷器控制面如图1所示。此结构中包含纵横排列的半导体制冷器,每排串联3个半导体制冷器,排与排之间并联成列共3排。采用该结构一方面可以提高半导体制冷器的效率,另一方面可以构成较为均匀的温度场。

图1 半导体制冷器控制面Fig.1 TEC control surface
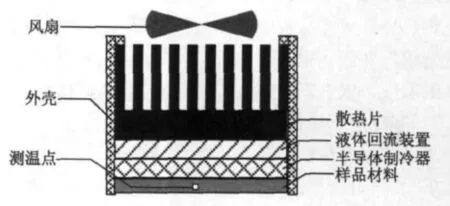
图2 样品加热炉结构Fig.2 Sample furnace structure
1.1.2 炉体结构
样品加热炉的结构如图2所示,最外层的辐射面是被测样品材料,材料上钻有插孔用于放置Pt100热电阻,材料的表面积为140mm×140mm的正方形;其次为半导体制冷器控制面,此结构中包含纵横排列的半导体制冷器;再次为液体回流装置,用于减小半导体制冷器两个面上的温差,且将其基础温度限定在安全温度范围。因为当半导体制冷器在较大温差下工作时,制冷系数迅速下降,制冷工况也会迅速恶化,液体回流装置如图3所示;最后是散热层,散热层的作用是将多余的热量带走,不影响整个系统正常工作。
1.2 温度控制系统设计
温度测量系统的硬件电路系统由下位机和上位机构成,下位机硬件主要由温度传感器Pt100、功率放大器AD620构成的调理电路、A/D转换器AD574A和半导体制冷器的H桥驱动电路以及单片机组成,上位机为PC机,系统原理图如图4所示。数据采集过程为:在12V恒流源的激励下,Pt100的阻值随温度的变化转换成电压的变化,调理电路对电压信号进行放大、变换,输出标准信号,经A/D转换送下位机,再通过串行通信上传给PC机进行存储、显示和图形化。对温度的控制不是根据预先设定的温度值,而是根据设定值与采样值的偏差e以及偏差变化率ec,当偏差大于0时加热,偏差小于0时制冷。
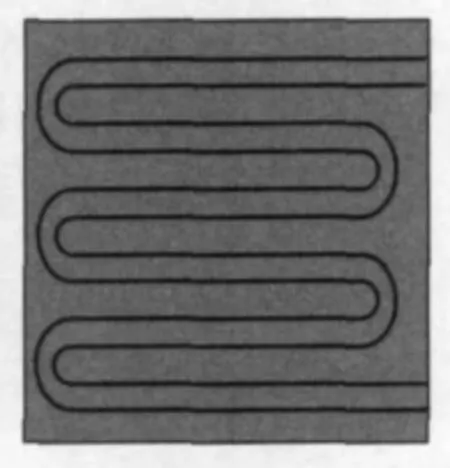
图3 液体回流装置Fig.3 Liquid reflux device

图4 系统原理图Fig.4 System schematic
1.2.1 温度采集模块
铂电阻温度计因其测温范围宽、准确度高、性能稳定、组成测控温系统灵活而在温度测量领域得到了广泛的应用,其测量范围为-200~850℃。常用的Pt100电阻接法有三线制和两线制,其中三线制接法的优点是将Pt100的两侧相等的的导线长度分别加在两侧的桥臂上,使得导线电阻得以消除,本文采用三线制接法,如图5所示。测温原理:电路采用D1和电位器R5调节产生4.096V的参考电源;采用R1、R2、R6、Pt100构成测量电桥(其中R1=R2=2kΩ,R6为100Ω精密电阻),当Pt100的电阻值和R6的电阻值不相等时,电桥输出一个mV级的压差信号,这个压差信号经过AD620放大后输出期望大小的电压信号,该信号可直接连AD转换芯片。
1.2.2 通信模块
采用89C52作为温度控制器,温控器通过RS-232与PC机通讯,接受PC机发送的温控指令,并将实测的温度数据上传给PC机。温控器的通讯系统包括下位机软件和上位机软件两部分。下位机程序包括主程序、显示子程序、A/D转换子程序和D/A转换子程序等,实现了对A/D、D/A以及键盘显示的驱动。另外,在A/D采样过程中还加入了显示报警功能,当采样温度值超出设定的温度范围,温控器报警信号灯就会闪烁并停止对TEC的驱动。上位机软件主要是通过串行口RS-232实现对温控仪的控制,对实时输入的温度数据进行控制并显示输出,通信过程如图4所示。
1.2.3 制冷器驱动
半导体制冷片根据流过半导体的电流方向和大小来决定其工作状态,因此需对半导体制冷器提供一个大小、方向可调节的电流,通过调整电流的大小来调整半导体制冷器制冷制热的强度,通过调整电流的方向实现加热和制冷的转换。文中采用H桥驱动电路,对半导体制冷器进行驱动,如图6所示:Q1和Q4为P沟道型MOS管,Q2和Q3为N沟道型MOS管,VCC为12V。当Q1和Q2导通时,电流经半导体制冷器由左至右流过;当Q3和Q4导通时,电流经半导体制冷器由右至左流过。通过控制Q1和Q4导通时间来控制半导体制冷器的工作时间。
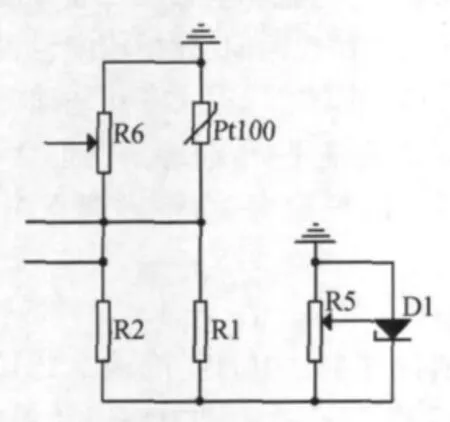
图5 Pt100接线方式Fig.5 Pt100wiring
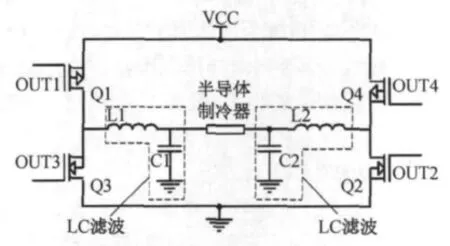
图6 H桥驱动电路Fig.6 H-bridge driver circuit
2 样品加热炉温控系统仿真及实验
2.1 模糊PID控制原理及设计
模糊PID是文中的核心部分,温度模糊控制器结构采用二维模糊控制器,即以实际温度对设定温度的误差e及误差的变化率ec作为模糊控制系统的输入模糊变量[5],语言变量值取{NB,NM,NS,ZO,PS,PM,PB}7个模糊值;选择输出语言变量为 Δkp、Δki、Δkd语言变量值也取{NB,NM,NS,ZO,PS,PM,PB}7个模糊值,建立 Δkp、Δki、Δkd的模糊规则,控制规则如表1、表2及表3所示:

表1 kp模糊规则控制表Tab.1 Fuzzy rules control table of kp

表2 ki模糊规则控制表Tab.2 Fuzzy rules control table of ki
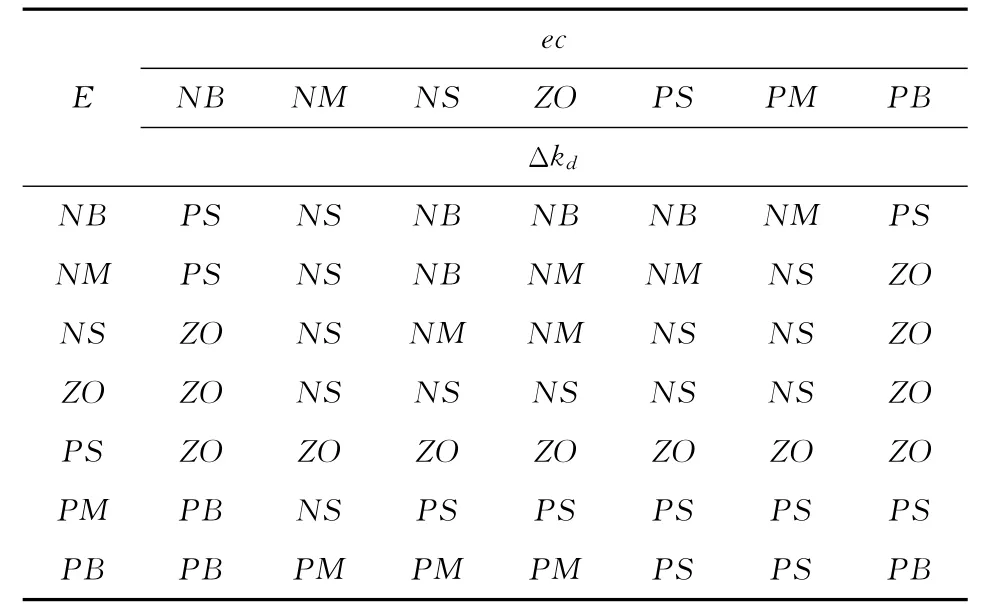
表3 kd模糊规则控制表Tab.3 Fuzzy rules control table of kd
2.2 仿真与程序设计
文中被控对象为基于半导体制冷器的样品加热炉,其传递函数为:

根据PID算法得:kp=0.3510,ki=0.0025,kd=12.0042。误差和误差变化的论域均为e=ec=[-6,6],借助MATLAB软件中的模糊逻辑工具箱进行设计[6-7],步骤如下:
(1)应用MATLAB下的FIS编辑器,输入为e和ec,输出为kp,ki,kd。
(2)继续在FIS编辑器中建立误差e,误差的变化ec的隶属函数曲线,NB为gaussmf型,PB为smf型,其余5个变量为trimf型,如图7所示。kp,ki,kd的过程相同。
(3)打开Rules editor,根据表1、表2及表3进行规则编辑,把此二输入判断关系设成and,将下列1~49所有模糊规则语句输入。

图7 e、ec的隶属度函数Fig.7 Membership function of e and ec


(4)运行模糊PID控制程序。
2.3 仿真及实验结果分析
在恒定室温下(20℃)对加热炉系统进行实验验证。在加热情况下,将样品加热炉的预设温度设置为T=50℃,制冷情况下,将预设温度设置为T=-10℃,当系统稳定后测量不同温度下的系统输出。仿真结果与实验结果如图8、图9所示。

图8 仿真与实验结果对比(T=50℃)Fig.8 Comparison of the simulation and experimental results(T=50℃)

图9 仿真与实验结果对比(T=-10℃)Fig.9 Comparison of the simulation and experimental results(T=-10℃)
由实验结果可以看出,应用模糊PID控制算法对样品加热炉进行温度控制,系统无超调量,调节时间短(加热210s,制冷315s),加热和制冷情况下的控制精度分别为士0.20℃和士1.00℃。
3 结 论
本文对近室温样品加热炉温度的模糊PID控制进行了研究,介绍了基于半导体制冷器的样品加热炉的结构及温度控制方法。将模糊PID算法用于工作在近室温的样品加热炉的温控系统中,不但能解决系统惯性大、易受到干扰等问题,而且能提高系统的响应速度。由仿真结果可以看出,模糊PID算法无超调量、调节时间短。实测结果也表明,该算法系统响应快。在加热情况下,实际温度与设定温度之间的误差为±0.20℃;在制冷情况下,实际温度与设定温度之间的误差为±1.00℃。
[1]杨照金.光电隐身效果评估技术系列讲座[J].应用光学,2011,32(2):377-382.
[2]刘家环,李明伟.对在复制轻质金属反射镜上镀红外8~14μm反射膜的探讨[J].光学仪器,1999,21(4-5):149-152.
[3]吴江辉,高教波,李建军.固体材料定向光谱发射率测量装置研究及误差分析[J].应用光学,2010,31(4):597-601.
[4]于 洵,王 晶,武继安.常温面源黑体温度控制稳定性研究[J].应用光学.2011,32(增刊):100-103.
[5]张 宏,戴景民.面黑体辐射源温控系统的设计与实现[J].电机与控制学报,2006,10(5):526-530.
[6]张化光.模糊自适应控制理论及其应用[M].北京:北京航空航天大学出版社,2002.
[7]李友善.模糊控制理论及其在过程控制中的应用[M].北京:国防工业出版社,1993.
猜你喜欢
科学大观园(2023年17期)2023-08-30
煤气与热力(2021年2期)2021-03-19
空间科学学报(2020年6期)2020-07-21
儿童故事画报·发现号趣味百科(2017年1期)2017-06-01
光学精密工程(2016年1期)2016-11-07
物理化学学报(2015年7期)2015-12-30
橡胶工业(2015年8期)2015-07-29
沙漠与绿洲气象(2014年3期)2014-03-25
石油工程建设(2014年5期)2014-03-20
实验技术与管理(2014年12期)2014-03-11
