
全气动多缸行程程序控制系统的快速设计
2013-03-17 01:15唐德栋舒庆刘瑞李斌
机床与液压 2013年10期
唐德栋,舒庆,刘瑞,李斌
(哈尔滨理工大学机械动力工程学院,黑龙江哈尔滨150080)
多气缸顺序动作气压控制回路设计时,首先应分析是否存在障碍信号,常用的方法有很多,如信号动作状态图法、卡诺图图解法等,这些方法较繁琐且易出错[1-2]。
气动节拍器是近几年发展起来的一种新型气动自动控制元件,它具有线路连接清晰、自动消除障碍信号、工作安全可靠、改变控制程序方便快捷的特点。具有手动-自动控制、复位、紧急停车、互锁保护、控制动作显示等功能。是一种符合现代气动发展趋势的微型化、集成化、模块化的新型智能气动控制元件。
1 气动节拍器的结构
节拍器由若干个独立的控制单元连接而成,单个控制单元的结构如图1所示,双气控换向阀2 控制本单元的气体输出,完成本步的执行元件的动作控制,单气控换向阀1 实现下一个控制单元的激活控制,当下一个控制单元成为活动步时,通过梭阀3 控制本单元成为不活动步(即A 口没有气体输出)。
各气口的功能说明:
P:气源进气口。当多个模块组合使用时,各模块P 口应相通连接;
A:气控信号输出口。当多个模块组合使用时,各模块的A 口分别输出气控信号;
X:气控信号输入口。当多个模块组合使用时,各模块的X 口分别接受来自外部的控制气体;
L:总复位控制口,当L 口与气源接通时,节拍器恢复为初始状态,程序执行完本步动作后停止;
Zn:转换条件信号输出口;控制其前级步成为不活动步。
Zn+1:转换条件信号输入口,当多个模块组合使用时,前一个模块的Zn +1 口应与后一个模块的Zn 口相接;
Yn:起动信号口;
Yn+1:步进指令控制口,当多个模块组合使用时,前一个模块的Yn+1 口应与后一个模块的Yn 口相接,以触发Yn 起动。
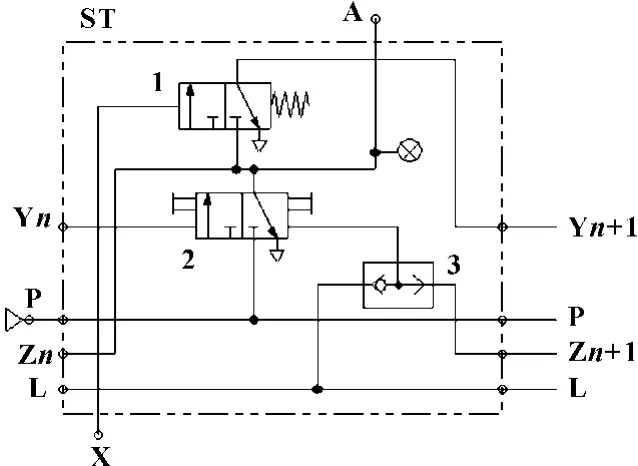
图1 单个控制单元结构图
2 气动节拍器的工作原理
节拍器的设计思想是将所有的原始信号(不管是否有障碍)全部经过一个信号分配器处理为无障碍信号后作为执行信号,去控制主控阀动作,根据程序要求改变信号分配器的输入、输出信号的顺序,就可满足所需程序的动作要求。
气动节拍器的工作原理需遵循的基本控制规则如下:
(1)当前控制单元控制的动作为活动步,且转换条件满足时,下一个控制单元激活。
(2)下一个控制单元成为活动步的同时,前级的控制单元变为不活动步。
下面以3 个控制单元组成的节拍器(如图2)说明其具体的工作原理:
在启动信号Yn 的作用下,换向阀2 处于左位,控制单元ST1 成为活动步(即A1 口有气体输出),从而可以控制该步对应的外部气路气控换向阀动作,气源驱动相应的执行元件完成本步动作,本步动作完成时,转换条件X1 得到满足(即X1 口有气体进入),换向阀1 切换到左位,气源气体经阀2 左位、阀1 左位控制阀5 切换到左位,实现控制单元ST2 成为活动步(即A2 口有气体输出),与此同时,气源气体经阀5 左位,梭阀3 控制阀2 切换到右位,控制单元ST1 成为不活动步。对于连接多个控制单元的节拍器的工作原理以此类推。节拍器最末的控制单元ST3 结构与前面的稍有不同,主要是保证在最后的控制单元处于活动步的状态,且转换条件满足时,才能实现第一步成为活动步。

图2 节拍器工作原理
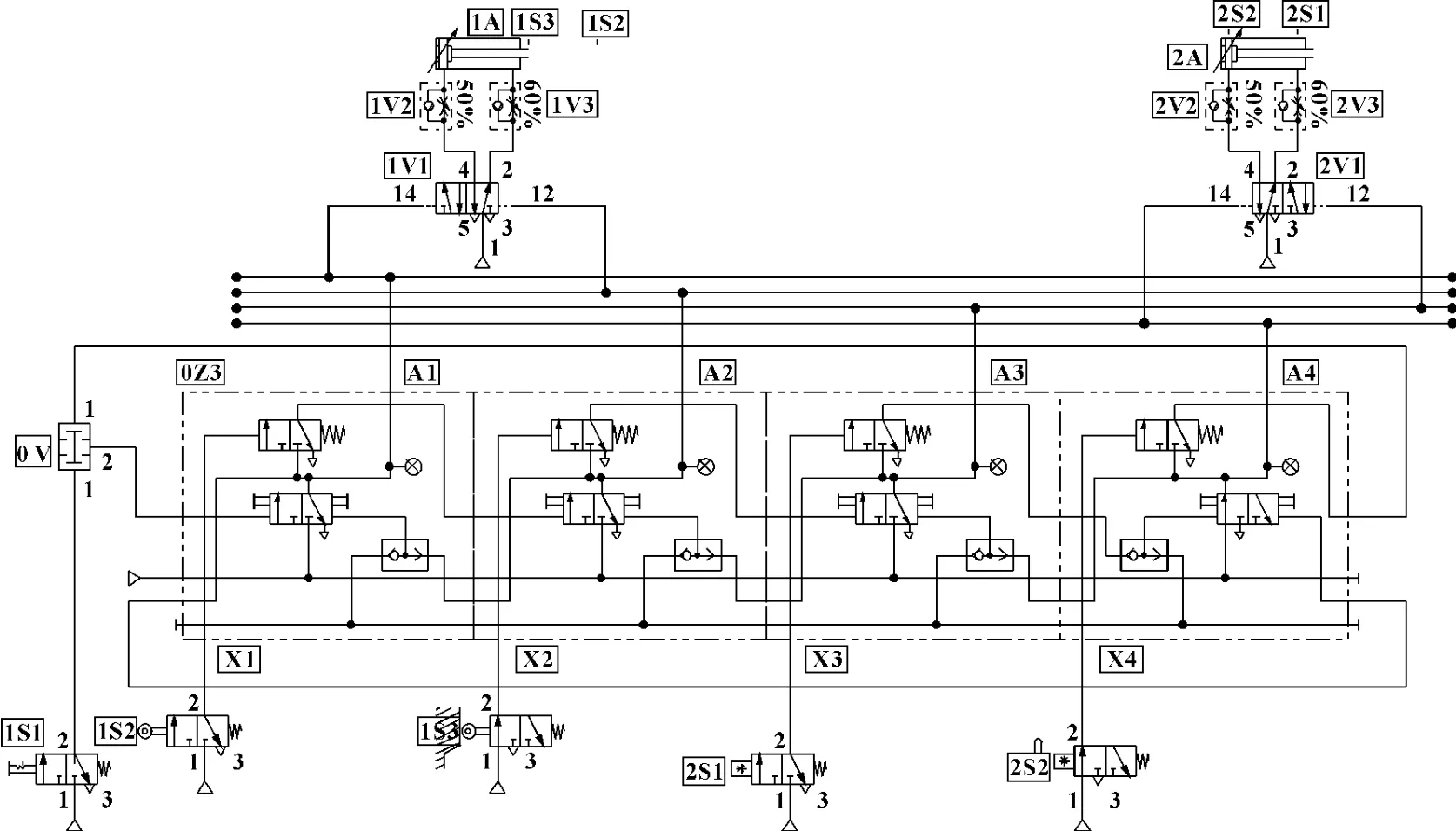
图3 采用节拍器的双气缸顺序动作控制回路
3 气动节拍器的在行程程序控制中的应用
下面以多缸多往复全气动控制回路为例说明其具体的应用。用A、B 代表气缸,用下标1、0 代表气缸活塞杆的伸出和缩回,设计两气缸的动作顺序A1A0B1B0的程序控制回路。由于该控制系统回路存在障碍信号,利用传统的设计方法分析过程复杂,设计效率较低[3-4]。根据前述节拍器的工作原理,图3给出了利用节拍器设计的气动回路图。如果两缸的动作顺序发生变化,气动元件无需变化,只需改变每个控制单元A 口输出与被控换向阀的气控端口的连接顺序即可,气动回路调整简单方便。
4 结束语
多缸往复行程程序控制回路的设计难点之一是障碍信号的排除,如果不能发现并排除这些障碍信号势必会造成整个动作过程无法正常进行。采用节拍器后,可自动消除障碍信号,保证在上一步顺序动作已经完成并检测到以后,下一步顺序动作才能开始。能有效节省气动控制回路的分析、设计和调试时间,保证回路的可靠工作。
【1】吴振顺.气压传动与控制中[M].哈尔滨:哈尔滨工业大学出版社,1995.
【2】林荣川,魏莎莎.多气缸顺序回路信号障碍消除及程序控制系统设计[J].包装与食品机械,2009,27(2):24-26.
【3】唐德栋.Festo 气压实验台在《液压与气压传动》实验教学中的应用[J].机床与液压,2004(2):125-126.
【4】唐德栋.基于Festo 实验台气动综合实验的开发[J].机床与液压,2006(4):109-110.
猜你喜欢
新少年(2022年3期)2022-03-21
数学小灵通(1-2年级)(2021年5期)2021-07-21
装备制造技术(2021年1期)2021-05-21
模具制造(2019年4期)2019-06-24
电子制作(2016年19期)2016-08-24
科技创新导报(2016年9期)2016-05-14
液压与气动(2015年6期)2015-04-16
护理研究(2014年2期)2014-12-04
小演奏家(2014年4期)2014-10-29
筑路机械与施工机械化(2014年2期)2014-03-01
