
主动式车辆限速方法研究*
2013-03-09 08:14吴铁民沈国娇
武汉理工大学学报(交通科学与工程版) 2013年1期
吴铁民 沈国娇 陆 建
(东南大学交通学院1) 南京 210096) (安徽江淮汽车股份有限公司2) 合肥 230601)
0 引 言
目前国外主动式限速器的研制工作刚刚开始,一些西方的发达国家根据自己国家交通的特点已展开研究.例如英国伦敦交通局定于2009年11月启动一项“汽车自动限速器”测试计划,部分出租车、公务车和公共汽车将在接下来的6个月中试用这种新型限速装置.国内关于主动式限速器的开发也提出过多种构想,大部分也集中在“主动限速”的方案中[1-3],但是存在着诸多的不足,集中体现在以下几方面:(1)车速控制的形式太简单,使得快速行驶中的车辆实现有困难.该类设计方案的油路控制方法是直接断开燃油泵的继电器开关,这样在具体的车辆行驶中控速方面过于单一;(2)存在一定的安全隐患.某些司机怀着侥幸的心理把车速一直保留在限速值附近,造成继电器开关的反复开合,最终导致烧坏继电器开关.因此在研究一种主动式车辆限速方法具有重要的现实意义和广阔的应用前景.
1 设计原理
1.1 设计思路
根据系统运作的设想,本系统由ZigBee通信部分和车载响应部分组成.由控制中心通过以太网电缆向安装有ZigBee通信模块的发射塔发送限速信息,车辆行驶至限速区附近时,车内车载响应部分接受到发射塔发射的限速信息,进行相应的分析之后进行动作,从而达到限速的目的.
控制中心将根据具体天气情况等因素确定限速路段的具体限速值.每个限速路段两端均有3杆ZigBee发射器,车辆进入限速路段前,首先接收到限速值预报即车载接受模块首先接收到一个标识号,之后经过第二个信号杆时会识别带有相应标识号的限速值信号从而完成限速值信号的传递.
车辆在接收到信号后限速器就开始工作,车载数码管显示器上就会显示该路段限速值以提醒司机主动控制车速,如果车速一直维持在安全车速之下,车载限速器不会干扰车速;若车速已超过限速值,车载语音警报器会警告司机,限速装置CPU会不断采集车速与限速值进行比较并计算超速程度,确定相应的限速强度.在超速发生下,若司机已开始降速,则副节气门转动角度较小,限速缓慢;若司机在超速情况下继续加速,限速器会加大副节气门转动角度,控制进气量使主节气门全开状态下的进气量的车速也只能维持在限速值以下,超速情况结束则解除警报.副节气门对进气量的控制分为6个不同程度,按照旋转角度大小区分.
当车辆驶出限速路段,首先接收到下一路段的标识号,经过第二个信号杆时得到带有下一路段标识号的限速值(若没有限速要求,则将限速值设为一个足够大的数值).
1.2 结构设计
1.2.1 控制中心监控系统设计 控制中心通过相关监控软件系统对地图上分布的限速路段进行主动式限速控制的开启或者关闭,同时能够特殊天气条件和特殊节假日等对限速值进行调整.
1.2.2 ZigBee通信系统设计 发射杆内的Zig-Bee通信模块接收控制中心的限速信号后实时向外发射限速信息.
限速信号发射塔安装结构见图1,采用了3塔发射结构,具体如下:信号标杆之间相距约100m,二号信号标杆位于限速边界,负责发送限速数据,报文中带有标识ID,例如在位于50km/h和30km/h的边界信号标杆,发送数据格式为:ID1:30;ID2:50.一号与三号信号标杆分别负责发送驶向和驶离路段限速值的标识ID,例如一号发送ID1,三号发送ID2.当车辆从限速50km/h驶向30km/h时,率先受到一号信号标杆发送的数据:ID1,这是当车辆继续向前行驶过程中收到二号信号标杆数据根据表示ID是即可辨识出驶向路段限速值(30km/h).同理当车辆从限速50km/h驶向30km/h时,率先收到三号信号标杆发送的数据:ID2,这是当车辆继续向前行驶过程中收到二号信号标杆数据根据表示ID是即可辨识出驶向路段限速值(50km/h).

图1 限速信号发射塔安装结构图
1.2.3 车载响应部分设计 车内响应系统部分硬件设计具体如下:通过单片机的脉宽捕获模块,采集车速传感器的信号,计算出当前车速,并与ZigBee模块接收到的限速值进行实时比较如果超速将动作节气门并语音报警,短暂延时后,减小副节气门的开度.如果车速已经降到限速值以下,驾驶员仍可通过油门踏板控制车速.硬件部分结构图见图2.

图2 车内响应部分硬件结构图
图3 为电喷车辆油路控制系统及副节气门(节气门组件)安装位置,将节气门安装在发动机上,用来控制进入气缸燃烧的进气量,发动机原有的管理控制单元则根据测量到的进气量,调整每个循环的喷油量,从而实现节气门开度越大,进入气缸的空气量越多,也就是燃油混合气越多,发动机的输出转矩越高.这样,可以通过改变节气门的开度,从而达到控制发动机输出转矩,以实现对车辆速度的控制.

图3 车辆油路控制系统示意
图4 是车辆行驶过程中不同车速下限速器工作时节气门的工作状态:(1)未超过限速,副节气门开度为0;(2)超过限速,副节气门开度增大,直至车速降到限速值以下,并保持适当时间,这期间即使车速进一步下降也不立即减小开度,直至限速值和实际车速的差值已经超过一个阀值,才逐步减小副节气门的开度.另外,副节气门的安装位置要尽可能靠近发动机.

图4 不同车速下副节气门工作形式
为了优化副节气门的响应特性,避免副节气门控制的波动,同时也为了使车速的控制更平顺,避免车速骤降和骤升,采用模糊控制理论[4-6]作为节气门开度控制策略.实现一步模糊控制算法的过程:单片机经过中断采样获取车辆行驶速度的精确值,然后将此值与给定值(限速值)比较得到误差信号e.然后计算出误差信号e的变化率ec.通过一定的模糊规则分别对e和ec进行模糊化,得到模糊量E和EC.通过查询模糊控制查询表得到模糊输出量,即节气门的位置模糊量.然后通过一定的规则转换成精确值输出.
设偏差值的模糊量为E,偏差值变化率的模糊值为EC.偏差值的精确量的取值范围是[-10,10](单位:m/s),偏差值变化率的精确量的取值范围是[-5,5](单位:m/s2),输出量为节气门的角度u,取值范围是[-90,90](单位:(°)).将他们划分为13个等级,即{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}.则偏差量e的量化因子为10/6=1.67,偏差量变化率的量化因子为5/6=0.84,输出量的量化因子为90/6=15,程序流程见图5.
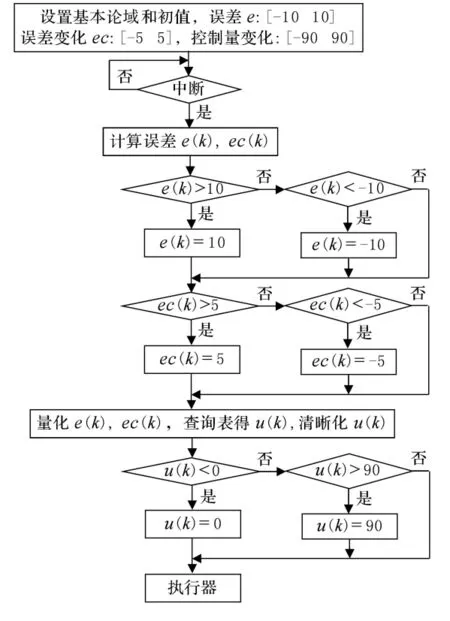
图5 模糊控制流程图
2 Matlab仿真
Matlab仿真框图及结果示意图分别见图6~7.本控制系统利用模糊控制器代替PD控制,用偏差E和偏差变化率EC这2个量作为模糊控制器的输入,模糊控制器有一个输出,通过Matlab仿真出较好的波形.
在图7中,速度随着节气门开度的变化规律符合我们限速的设计思路.A时刻实验开始,此时由于未接受到任何限速信号,车载限速装置处于未工作状态,副节气门开度最大;B时刻系统接收到限速信号,并检测到超速状态,副节气门开度迅速减小,车速在短暂的过度后开始降低;C时刻副节气门开度达到了最小,此时车速还没有降到限速值,车速经过一段时间后(D~C)达到了稳定的限速值,D时刻节气门也稳定于相应于限速值的某个开度.

图6 Matlab模糊控制仿真框图

图7 仿真结果示意图
3 结 论
1)该主动式限速器将无线通信与节气门控制有机结合,车辆的限速不再依赖司机主观意识与地面的减速带,将车辆的限速从传统的被动式进步到主动式,在遏制超速方面具有较大的现实意义.
2)系统使用模糊策略控制来控制节气门进而限制车速,能够满足在不同超速下对车辆进行较柔和的控制,使得限速过程变的比较平稳,增加了安全性.
3)结合限速值的可调节性,系统可以和城市交通管理网结合,可根据实际路况需求,随时调整道路的管制.
虽然本系统经过仿真验证是合理有效的,但由于没有在实车上进行试验,在实际使用中仍有可能存在一些问题.
本系统主要应用于因超速造成的事故率高、事故果严重的工地大货车和长途大卡车,这类车辆可管理性较强,将该系统改装此类车辆可明显减少由超速造成的特大事故,从而在保证人民安全和减少国家经济损失具有重要的现实意义和应用前景.相信随着交通安全越来越受到关注,该主动式车辆限速系统将会被越来越广泛的应用在各个交通领域.
[1]陈倩饴,陈再清.汽车自动限速系统设计[J].计算机测量与控制,2006,14(3):351-353.
[4]李鑫铭,陆 健,王 炜.公路车辆行驶临界速度计算模型[J].东南大学学报:自然科学版,2009,39(1):166-170.
[3]石维佳,刘彦磊,宋回回,等.一种嵌入式智能电子节气门控制系统的实现[J].自动化与仪表,2009(11):33-35.
[4]杨祖元,刘鸿飞,杜长海.交通强度优先的交叉口模糊控制研究[J].计算机工程与应用,2009,45(36):193-221.
[5]YUAN Xiaofang,WANG Yaonan,SUN Wei.RBF networks-based adaptive inverse model control system for electronic throttle[C]//IEEE Transactions on Control Systems Technology,2010,18(3):750-756.
[6]KONG Deyong,GAO Yongqi.The study on application of T-S fuzzy control on aerocraft roll channel design[J].Journal of Projectiles,Rockets,Missiles and Guidance,2009,29(4):19-24.
猜你喜欢
公民与法治(2020年22期)2020-12-14
中华建设(2020年5期)2020-07-24
网络文学评论(2019年6期)2019-12-13
汽车维护与修理(2019年3期)2019-08-08
汽车观察(2018年12期)2018-12-26
汽车维护与修理(2018年19期)2018-04-28
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
