制导弹药用微惯性测量单元结构设计
2013-02-28 08:05:26李杰刘俊
兵工学报 2013年6期
李杰,刘俊
(中北大学仪器科学与动态测试教育部重点实验室,山西 太原030051)
0 引言
基于微机电系统(MEMS)惯性器件的微惯性测量单元(MIMU),目前被认为是实现常规弹药制导化改造与精确打击的一种重要组件。由于常规弹药内部空间狭窄、发射过载较高,因此要求用于这种场合作为核心组件的微机电惯性测量单元(MEMSIMU)必须具有体积小、重量轻和环境适应能力强等特点[1-3]。然而,目前对惯性测量单元(IMU)的研究主要集中在器件设计、电路设计、测试标定及误差补偿等方面,对IMU 结构设计方法的研究相对较少。为此,本文针对制导弹药应用,提出一种嵌入式一体化抗高过载的MEMS-IMU 结构设计方法,设计加工了MEMS-IMU 结构实体,完成了MEMS-IMU 集成,有限元仿真分析与地面和实弹炮击试验的一致性表明,该结构可以很好地满足制导弹药对MEMS-IMU 的小体积、轻重量和抗高过载等应用要求。

图1 MEMS-IMU 的组成结构模型Fig.1 MEMS-IMU composition model
1 制导弹用MEMS-IMU 的作用与组成结构模型
制导弹药用MEMS-IMU 的主要作用是:利用集成在其中的MEMS 陀螺仪和MEMS 加速度计,敏感弹体相对惯性坐标系的三维角速度和三维加速度信息,并将这些信息提供给导航计算机以便完成导航计算任务[4-7]。根据捷联惯导原理要求,MEMSIMU 的空间组成结构通常应满足如图1 所示的正交安装模型。3 只MEMS 陀螺仪在空间上尽量靠拢,其3 个敏感轴向相互垂直且正交于一点,3 只加速度计安装要求与陀螺仪类似,且其各敏感轴方向与对应的陀螺敏感轴方向一致。
2 制导弹药用MEMS-IMU 的结构设计方法
2.1 制导弹药用MEMS-IMU 结构设计的原则与方法
制导弹药用MEMS-IMU 结构设计的基本原则是:满足组成结构模型要求的合理性;便于加工制造的可实现性;采用最少的零部件、最简单的构造形式和最直接的装配关系的高可靠性。由于常规弹药特殊的应用环境,要求MEMS-IMU 结构除了应具有一般机械设计承受载荷、安装组件和提供构型的特征外,还应具有以下特点:1)较大的刚度和强度。MEMS-IMU 属于精密仪器,其原理和特点要求其结构保持稳定,不能有太大的变形和太大的振动;2)较轻的重量。为了增加药包重量,加大杀伤效果,要求MEMS-IMU 重量尽可能轻;3)较小的体积。制导弹药内部可用空间狭窄紧张,严格限制了MEMSIMU 结构的体积和形状,要求MEMS-IMU 结构设计必须紧凑,合理充分利用有限空间[8]。
2.2 MEMS-IMU 结构设计
根据上述设计原则,提出并设计了一种嵌入式MEMS-IMU 结构构型,如图2 所示。

图2 MEMS-IMU 结构Fig.2 MEMS-IMU structure
MEMS-IMU 结构安装体上设有3 个安装加速度计用凹台、3 个安装陀螺用凹台、1 个总线走线用空心结构、1 个出线用空心结构和3 个灌封用空心结构。3 个安装加速度计用凹台分别设于安装体的上侧面、左侧面、后侧面;3 个安装陀螺用凹台分别设于安装体的下侧面、右侧面、前侧面;总线走线用空心结构位于安装体内部;出线用空心结构设于安装体的前侧面;灌封用空心结构设于安装体的斜上侧面;总线走线用空心结构分别与出线用空心结构和灌封用空心结构贯通;3 只MEMS 加速度计分别安装在3 个安装加速度计用凹台上,3 只MEMS 陀螺分别安装在3 个安装陀螺用凹台上;3 只MEMS加速度计和3 只MEMS 陀螺的输出信号线依次通过总线走线用空心结构和出线用空心结构引出;总线走线用空心结构、出线用空心结构和灌封用空心结构内均灌封有灌封材料,灌封材料的种类可根据实际需要具体确定。
与现有MIMU 结构相比,本文所设计的MEMSIMU 通过应用一次性嵌入式的加工成型技术,不仅有效地消除了MEMS-IMU 结构的二次组装误差,而且最大限度地满足了安装体各侧面、各安装用凹台和各走线用空心结构的垂直度要求,并确保了3 只MEMS 加速度计和3 只MEMS 陀螺之间的相互正交性,从而极大地提高了MEMS-IMU 的安装精度。同时,由于应用了特殊的灌封材料与工艺对各走线和出线用空心结构灌封,极大地保护了加速度计和陀螺及其信号调理线路,使MEMS-IMU 结构具有了良好的抗高过载性能。
3 MEMS-IMU 结构性能分析
3.1 MEMS-IMU 结构应用环境的技术要求
1)变形要求:姿态角误差不大于30″;
2)模态要求:弹体振动频率范围远离100 Hz.
3.2 MEMS-IMU 结构的有限元模型建立
MEMS-IMU 结构底面有3 个半圆弧形安装孔,通过这3 个安装孔将MEMS-IMU 结构完全固定。对模型的主承力结构、载荷传感器及装配关系进行合理简化,可得到简化模型。其边界约束条件为将3 个圆弧形安装孔的内半圆弧设置为固支。载荷约束为x 方向分别施加1 000 g、2 000 g、5 000 g、10 000 g、20 000 g 的过载。网格划分采用合理的划分精度等级完成自由网格划分。对结合面的处理采用ADD或ULLTE 布尔操作命令进行连接,其影响以部件间的边界条件形式出现,分析结果包含了由于忽略结合面而带来的不利影响。MIMU 结构的有限元模型如图3 所示。
3.3 MEMS-IMU 结构的静力学特性分析
3.3.1 MEMS-IMU 结构载荷分析计算
由于MEMS-IMU 结构中的3 只MEMS 加速度计与3 只MEMS 陀螺仪及其电路板是通过灌封材料与MEMS-IMU 结构框架固定的,故其对MEMSIMU 结构的静力学影响可忽略不计,此处主要考虑MEMS-IMU 结构在受沿x 轴向过载作用时的结构受力,MEMS-IMU 结构质量m =33 g =3.3 ×10-2kg,尺寸38 mm×35 mm ×28 mm.根据牛顿第二定律,当沿x 轴向施加不同过载时,对应的载荷力及底面所受压强如表1 所示。
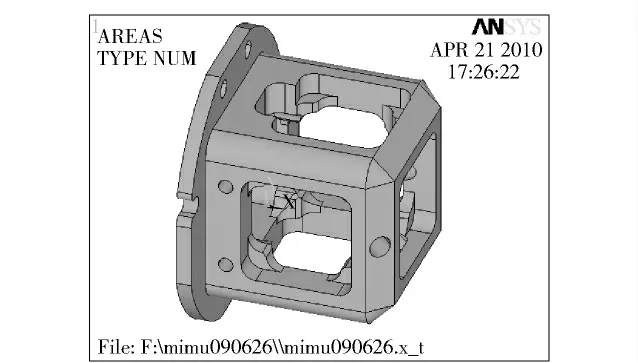
图3 MIMU 结构的有限元模型Fig.3 Finite element model of MIMU structure

表1 载荷力及压强分析计算Tab.1 Analysis and calculation of load force and pressure
3.3.2 变形分析
MEMS-IMU 结构在不同载荷下的变形量分布云图如图4 所示。给出了不同载荷下MEMS-IMU 结构变形前后对比情况,通过变形分析得到MEMSIMU 结构变形量的分析计算结构如表2 所示。

表2 MIMU 结构变形量分析计算结果Tab.2 Calculated results of MIMU structure deformation μm
由表2 可看出,MEMS-IMU 结构在受到10 000 g的过载时,其最大变形量为0.078 10 μm,该变形量很小,不会与其他结构件发生碰撞等影响。而当MEMS-IMU 结构受到20 000 g 的过载时,最大变形量为0.136 00μm,该变形量也很小,因此,其变形量不会对MIMU 结构构成影响。

图4 不同载荷作用下的变形量分布云图Fig.4 Deformation contours under different loads
根据MEMS-IMU 结构变形量分析计算结果所得变形值,计算出该变形量所能引起的最大角度变化,根据(1)式,可得MEMS-IMU 结构在不同载荷作用下最大角度变化,如表3 所示。

此变形引起的角度变化小于1.002″,制导弹药用MEMS-IMU 允许的姿态角度误差在30″左右,故可认为该结构满足要求。
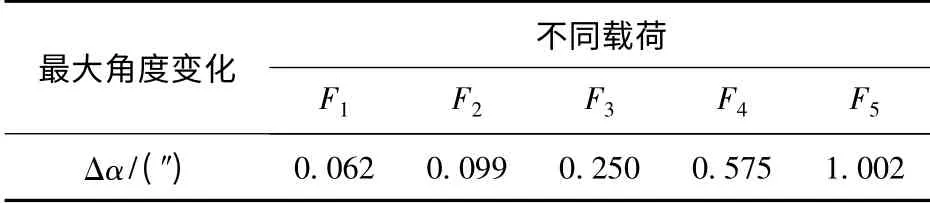
表3 不同载荷作用下最大角度变化Tab.3 Maximum angular variations under different loads
3.3.3 应力分布
不同载荷作用下各主要应力分析计算结果如表4 所示。

表4 应力分析Tab.4 Stress analysis MPa
由表4 可知:当施加过载分别为1 000 g、2 000 g、5 000 g、10 000 g 时,对应MEMS-IMU 结构的最大应力分别为3.46 MPa、6.61 MPa、19.10 MPa、30.50 MPa.对于铝合金材料2A12,O 型材料的屈服强度大于等于75 MPa,2A12-T3 的屈服强度大于等于345 MPa,2A12-T4 的屈服强度大于等于325 MPa.因此,过载小于10 000 g 时,均不会损坏MEMS-IMU 结构。而当施加过载达到20 000 g 时,MEMS-IMU 结构的最大应力为69.5 MPa,对于2A12-O 的铝合金材料,MIMU 结构则很容易发生断裂等问题。
3.4 MEMS-IMU 结构的模态分析
3.4.1 前处理阶段
利用SolidWorks 建立MEMS-IMU 结构的几何模型,然后导入到ANSYS 中的模型文件,重新设置模型文件的显示方式,即可获得MEMS-IMU 结构的有限元模型。在此基础上,定义单元类型及材料属性,如材料的弹性模量、泊松比和材料密度等。其中,MIMU 结构采用铝合金材料2A12,其模型参数如表5 所示。

表5 模型材料参数及单元类型Tab.5 Model material parameters and unit type
MIMU 结构底座上的3 个半圆弧螺孔在安装时,3 个方向的自由度均被约束,即内半圆弧的边界约束条件为固支,通过设置单元尺寸、指定单元类型,利用映射网格划分类型进行合理的网格划分。
3.4.2 求解阶段
在建立有限元模型后,进行模态设置、施加边界条件、进行模态扩展设置等。选择分析类型为Model,模型提取方法选用系统默认的Block Lanczos模式,确认求解选项信息无误后进行求解,提取系统前25 阶模态圆频率。
3.4.3 后处理阶段
通过图像显示和列表输出查看分析结果,获得MIMU 结构模型的前25 阶模态圆频率及其振型,前25 阶模态圆频率如表6 所示。
通过模态分析结果可知:MEMS-IMU 结构的振型主要表现为正方形框架的振动,底座的振动比较微弱。MEMS-IMU 结构的一阶频率高达5 468.0 Hz,远高于系统几十赫兹的频率要求范围,因此该MEMS-IMU结构的模态分析结果满足远离100 Hz 的模态分析要求。
4 MEMS-IMU 结构性能的试验
4.1 地面马歇特落锤锤击试验
为了验证所设计的MEMS-IMU 结构抗过载性能,首先进行了地面马歇特落锤锤击试验。试验时,将MEMS-IMU 固联在特定夹具上,然后安装于马歇特落锤锤头,用于采集传感器信号的数据记录器稳定固定在连接马歇特落锤的胶木上。并设置马歇特落锤每齿2 000 g,共12 齿,共计24 000 g.MIMUIMU 在24 000 g 的强度冲击下的输出电压,如图5所示。可明显看出,基于MEMS-IMU 结构的IMU在24 000 g 冲击后各传感器仍然保持正常工作,且各传感器零偏可很快恢复。这也说明本文所设计的MEMS-IMU 结构是正确、有效的,能够在高过载环境下很好地对传感器及其调理电路起到保护作用。
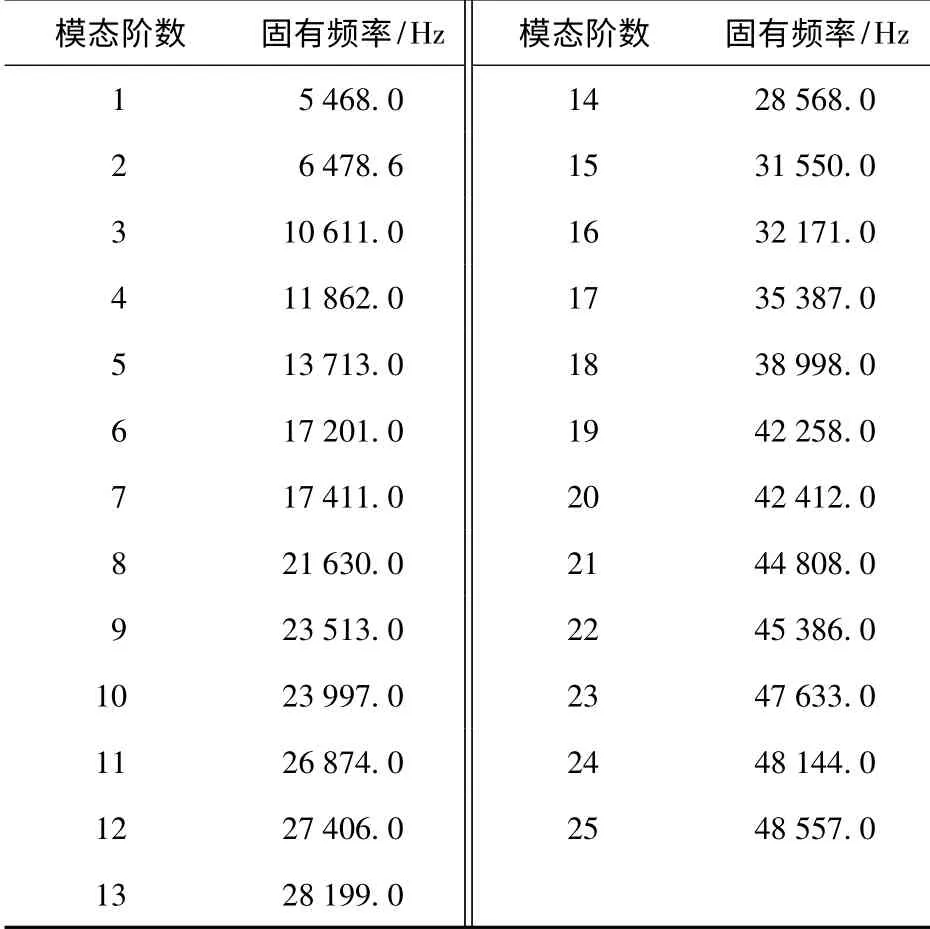
表6 系统前25 阶模态圆频率Tab.6 Modal circular probability of the 25 steps ahead
4.2 某炮弹实弹炮击试验
在地面马歇特落锤试验的基础上,以某炮弹为试验平台,开展了MEMS-IMU 的实弹炮击试验。试验中,将MEMS-IMU 及数据记录器固定安装于弹体内部,发射前系统上电。如图6 所示,数据记录器实时记录的安装在弹体轴向“减旋”平台上的MEMSIMU 测试到的弹丸从发射到落地的传感器输出数据波形。其中,惯组的轴向加速度计量程为±100 g,径向和横向加速度计量程为±10 g,轴向角速率陀螺量程为±400°/s,径向和横向角速率陀螺量程为±100°/s,考虑到实际弹道解算不需要落地后数据,因此,图6 中未显示惯性测量单元落地后的输出数据。如图7 所示为过载传感器对应的输出数据曲线,其中,过载传感器的量程为±20 000 g.

图5 24 000 g 过载下MEMS-IMU 输出电压曲线Fig.5 Output voltage curves of MEMS-IMU at 24 000 g
由图6 中MEMS-IMU 的轴向加速度计输出数据曲线可看出,在弹丸出膛后约6 s 左右,弹上发动机开始工作,时间约1 s,助推加速度约15 g.由图7轴向过载传感器的实测过载数据及试验装药信息可知,试验过程中弹丸的最大发射过载约为10 000 g.整个弹体飞行过程中,MEMS-IMU 完全存活,且准确、可靠地进行了弹体惯性参数的精确测量。从落区回收的MEMS-IMU 观察可见,MEMS-IMU 结构完好无损,机械性能良好,从而验证了所设计的MEMS-IMU 结构具有抗高过载特性。
5 结论

图6 炮击试验MEMS-IMU 测量输出Fig.6 Output from MEMS-IMU in bombardment test
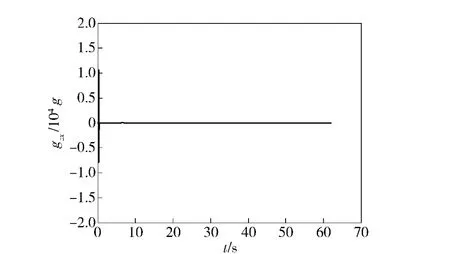
图7 炮击试验轴向过载传感器测量输出Fig.7 Output from over-loading sensor in bombardment test
MEMS-IMU 作为MIMU 系统中的核心组部件,其结构设计在MIMU 设计中有着举足轻重的地位和作用,本文针对制导弹药用MEMS-IMU 结构设计问题,详细介绍了其结构的具体设计与分析验证方法,仿真分析与试验结果一致表明,采用嵌入式一体化结构设计方法所设计的MEMS-IMU,有效解决了现有MEMS-IMU 结构设计过程中安装精度低和抗过载性能差的问题,可为制导弹药提供小体积、轻重量、抗高过载的MEMS-IMU.研究工作为制导弹药及其他相关领域的MEMS-IMU 结构设计提供了较强的理论参考与借鉴。
References)
[1]李荣冰,刘建业,孙永荣.MEMS-IMU 构型设计及惯性器件安装误差标定方法[J].中国惯性技术学报,2007,15(5):526 -529.LI Rong-bing, LIU Jian-ye, SUN Yong-rong.MEMS-IMU configuration and its inertial sensors’calibration for installation errors[J].Journal of Chinese Inertial Technology,2007,15(5):526 -529.(in Chinese)
[2]杨胜,房建成,盛蔚.光纤捷联惯性测量单元设计与实现[J].中国惯性技术学报,2006,14(3):77 -79.YANG Sheng,FANG Jian-cheng,SHENG Wei.Design and realization of strapdown inertial measurement unit based on FOG[J].Journal of Chinese Inertial Technology,2006,14(3):77 -79.(in Chinese)
[3]张霄,房建成,李建利,等.一种隐式结构MIMU 设计及标度因数温度误差分析[J].中国惯性技术学报,2008,16(6):665 -671.ZHANG Xiao,FANG Jian-cheng,LI Jian-li,et al.Design of structure-latent MIMU and analysis of scale factor error on the temperature[J].Journal of Chinese Inertial Technology,2008,16(6):665 -671.(in Chinese)
[4]王亚凯,周军,于晓洲.微惯性测量单元设计及其误差补偿模型的研究[J].测控技术,2009,28(1):5 -8.WANG Ya-kai,ZHOU Jun,YU Xiao-zhou.Design of a MIMU and study on model of error compensation[J].Measurement&Control Techniques,2009,28(1):5 -8.(in Chinese)
[5]胡士峰,马建仓.基于MEMS 陀螺和加计的微惯性测量单元研制[J].航空计算技术,2008,38(6):115 -118.HU Shi-feng,MA Jian-cang.Development of micro inertial measurement unit based on MEMS gyroscopes and accelerometer[J].Aeronautical Computing Technique,2008,38(6):115 -118.(in Chinese)
[6]杨金显,袁赣南,徐良臣.MIMU 系统设计研究[J].弹箭与制导学报,2007,27(3):47 -49.YANG Jin-xian,YUAN Gan-nan,XU Liang-chen.The research of MIMU system design[J].Journal of Projectiles Rockets,Missiles,and Guidance,2007,27(3):47 -49.(in Chinese)
[7]代刚,李枚,苏伟,等.微惯性测量单元的误差整机标定和补偿[J].光学精密工程,2011,19(7):1620 -1626.DAI Gang,LI Mei,SU Wei,et al.Error calibration and compensation of entire micro inertial measurement unit[J].Optics and Precision Engineering,2011,19 (7):1620 - 1626.(in Chinese)
[8]李杰,刘俊,张文栋,等.一种具有抗高过载性能的微型嵌入式惯性测量单元:中国,201010134747[P].2010 -07 -28.LI Jie,LIU Jun,ZHANG Wen-dong,et al.An miniature embedded measurement unit with high overload resistance:China,201010134747[P].2010 -07 -28.(in Chinese)
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21 00:40:16
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:06
中国特种设备安全(2021年5期)2021-11-06 05:09:08
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
学生天地(2019年6期)2019-03-07 01:10:46
军事文摘(2018年24期)2018-12-26 00:58:18
快乐语文(2018年36期)2018-03-12 00:56:02
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:23
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年5期)2016-11-07 09:06:41