啮合刚度对人字齿行星传动系统动态载荷特性的影响研究
2013-02-28 08:06:12朱增宝朱如鹏李应生戴光昊朱振荣
兵工学报 2013年6期
朱增宝,朱如鹏,李应生,戴光昊,朱振荣
(1.南京航空航天大学 江苏省精密与微细制造技术重点实验室,江苏 南京210016;2.安徽理工大学 机械工程学院,安徽 淮南232001;3.中国船舶重工集团公司第703 研究所,黑龙江 哈尔滨150036)
0 引言
行星齿轮传动利用多个行星轮分担载荷,形成功率分流,具有体积小、质量轻、传动比大和寿命长等优点,广泛应用于冶金、矿山、航空、舰船等领域的机械传动系统。
动态载荷特性直接影响行星齿轮传动系统的稳定性和可靠性,国内外学者对此做了大量的研究工作。文献[1 -4]研究了行星传动系统误差、转速等因素对系统动态载荷特性的影响,文献[5 -8]研究了行星传动动态载荷的均载特性。啮合刚度是行星齿轮传动系统主要参数激励,啮合刚度激励是行星传动动力学研究的一项重要内容。文献[9 -10]研究了啮合刚度对系统稳定性影响,文献[11 -12]研究了啮合刚度对系统固有频率的影响。以上这些研究对象主要针对直齿轮行星传动系统;主要研究内容为误差、转速对系统动态载荷特性的影响,传动系统动态载荷的均载特性以及啮合刚度对系统稳定性、固有频率的影响,而啮合刚度对行星传动系统动态载荷特性的影响,国内外文献中未见较深入的研究。
人字齿行星传动系统中的人字齿载荷是逐渐加上,再逐渐卸掉的,与直齿轮载荷突然加上和卸掉完全不同,不能按直齿轮锯齿型啮合刚度曲线计算人字齿轮时变啮合刚度;人字齿行星传动系统内齿轮一般不固定,双齿联轴器作为内齿轮与固定齿圈间的中间构件有周向自由度,应把双齿联轴器纳入动力学模型中。
本文考虑了双齿联轴器的影响,基于集中参数振动理论,建立了人字齿行星传动系统动力学模型;引入斜齿轮啮合刚度公式按2 个斜齿刚度并联计算了人字齿时变啮合刚度,获得了时变啮合刚度交变分量幅值的精确值,改变了传统啮合刚度交变分量幅值按平均分量[13]进行估算的方法;从啮合刚度的平均分量和交变分量2 个方面研究了内外啮合刚度对传动系统内外啮合动态载荷特性的影响。研究工作对人字齿行星传动系统内外啮合刚度的确定具有指导意义。
1 系统的动力学模型
如图1 所示人字齿行星传动系统示意图。整个系统由太阳轮Zs、行星轮Zpi(i =1,2,…,n)、内齿轮Zr、行星架H、双齿联轴器Zg,固定齿圈Zf组成。输入扭矩TD通过太阳轮Zs经行星架H,传送到输出轴L 上。

图1 人字齿行星传动系统示意图Fig.1 Sketch map of herringbone planet train
太阳轮、行星轮采用人字齿,为便于加工,齿轮设有退刀槽。内齿轮由2 个齿向不同的斜齿齿圈组成,内齿轮Zr1采用斜齿与双齿联轴器Zg连接,双齿联轴器Zg采用直齿与浮动齿圈Zf连接。
系统的动力学模型如图2 所示。采用以行星架转速ωH旋转的动坐标系,以行星架的速度作为参照,按“转化轮系法”计算各个齿轮的相对速度。
图2 中,KHL为联接行星架H 和输出轴L 的扭转刚度;Ks、Kp和Kr分别为齿轮Zs、Zpi和Zr的支承刚度;KH为行星架H 在行星轮Zpi公转半径rH上的切向刚度;Kgq和Kfq分别为双齿联轴器Zg与齿轮Zr以及固定齿圈Zf接触的切向刚度。
人字齿行星传动系统共有(9 +3n)个自由度,其广义位移列向量

图2 人字齿行星传动系统动力学模型Fig.2 Dynamic model of herringbone planet train
式中:xs、xpi和xr分别为齿轮Zs、Zpi和Zr沿基圆半径扭转的线位移;xg为双齿联轴器Zg沿分度圆半径扭转的线位移;xH表示行星架H 在其半径rH的线位移;xL为输出轴L 与行星架H 的半径rH接触处的线位移;Hs与Vs、Hpi与Vpi和Hr与Vr分别为齿轮Zs、Zpi和Zr的中心在旋转坐标系中的横向与纵向位移。
2 系统的动力学方程
行星传动系统行星轮Zpi与内齿轮Zr间的啮合称为内啮合,太阳轮Zs与行星轮Zpi间的啮合称为外啮合,一起简称为内外啮合。令Prpi和Pspi分别为内外啮合的弹性啮合力,则

式中:Krpi和Kspi分别为内外啮合的时变啮合刚度,分别称为内啮合刚度和外啮合刚度;α1和α2分别为齿轮副内外啮合的啮合角;erpi和espi分别为内外啮合的啮合线上误差等效位移;2π(i -1)/n 表示第i 个行星轮相对于第1 个行星轮的位置角。
令Drpi和Dspi分别为内外啮合的啮合阻尼力,则
式中Crp和Csp分别为内外啮合的阻尼系数,按文献[14]中方法计算。
考虑双齿联轴器的影响,建立的人字齿行星传动系统动力学方程由(4)式~(9)式组成:
其中:ms、mp和mr分别为齿轮Zs、Zpi和Zr在各自基圆半径上等效质量;mg为双齿联轴器Zg在其分度圆半径上等效质量;mH为行星架H 在行星架半径rH上等效质量;mL为输出轴L 与行星架H 接触处rL上等效质量;Ms、Mp和Mr分别为齿轮Zs、Zpi和Zr的 质量;PD为输入转矩TD在齿轮Zs基圆半径rsb上的等效力,PD=TD/rsb;PL为负载转矩TL在输出轴L 与行星架H 接触处rL上等效力,PL=TL/rL.
3 人字齿轮副时变啮合刚度计算
Maatar 等[15]基于齿轮副瞬时总接触线长度推导出斜齿轮时变啮合刚度。本文应用该公式按2 个斜齿刚度并联计算人字齿啮合刚度

式中:k0为单位接触线长度的齿轮平均啮合刚度,按国标GB/T3480—1997 中斜齿轮平均啮合刚度计算公式计算;L(τ)为齿轮副瞬时总接触线长度;τ =t/Tm,t 为时间历程,Tm为啮合周期。L(τ)的计算公式为
式中:φ 为各个行星轮与太阳轮之间啮合相位差,按Parker 等[16]提出的方法计算。Ak、Bk和Lm具体含义见(12)式

式中:εα为齿轮副端面重合度;εβ为齿轮副轴向重合度;βb为齿轮基圆螺旋角;b 为人字齿轮单边斜齿宽度。
由(11)式可见,人字齿轮副瞬时总接触线长度由平均分量和交变分量2 部分构成:Lm和总接触线长度交变分量的第1 阶谐波幅值Amp1随端面重合度εα和轴向重合度εβ变化曲面如图3 所示,随着齿轮副轴向重合度εβ增大,Amp1衰减很快。人字齿轮副轴向重合度εβ一般大于2,所以Amp1很小。总接触线长度交变分量的其他阶谐波幅值随端面重合度εα和轴向重合度εβ变化变化规律与图3 相似,其他阶谐波幅值远比第1 阶谐波幅值Amp1小。由此可知,人字齿轮副总接触线长度交变分量幅值很小。
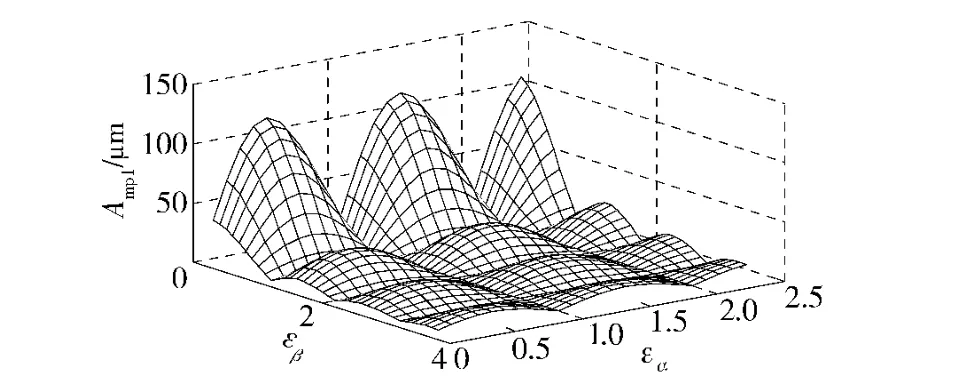
图3 随εα 和εβ 变化的Amp1曲面Fig.3 Curved surface of Amp1 vs εα and εβ
与人字齿轮副瞬时总接触线长度的平均分量和交变分量相对应,时变啮合刚度由平均分量和交变分量2 部分构成φ)+Bksin(2πkτ -φ)).取前5 阶谐波按文中算例参数计算的人字齿轮副内外啮合刚度Krp1和Ksp1曲线如图4 所示。可见,人字齿啮合刚度曲线变化平缓,啮合刚度交变分量的幅值很小,与直齿轮锯齿型啮合刚度曲线相比区别明显。

图4 人字齿轮副内/外啮合刚度Fig.4 Internal (external)mesh stiffness of herringbone gear pair
4 动载系数计算
用动载系数反映行星传动系统的动态载荷特性。动载系数定义为实际齿轮副啮合时的最大作用力和纯由外加载荷所产生的相应作用力之比值[17]。动载系数越大,啮合齿轮副承担的动态载荷越大。
采用傅立叶级数法[18]求解(4)式~(9)式,进而得内外啮合弹性力Prpi和Pspi,令Grpi(t)和Gspi(t)分别为各行星轮内外啮合动态载荷系数,则

式中Tr为作用在内齿轮Zr基园半径rrb上的扭矩。
动态载荷系数的最大值为动载系数,则系统行星轮内外啮合动载系数

5 啮合刚度对系统动态载荷特性的影响分析
针对某人字齿行星传动减速器进行分析。
减速器主要参数:模数m =5 mm,行星轮个数N=3,太阳轮齿数Zs=41,行星轮齿数Zp=22,内齿轮齿数Zr=85,齿宽系数φd=1.3,压力角α =20°,螺旋角β=22°;输入轴转速n =1 500 r/min,输入功率P=400 kW;太阳轮、行星轮和内齿轮均使用合金结构钢40Cr,弹性模量为2.06 ×1011N/m2;太阳轮、行星轮和内齿轮支撑刚度分别为2 × 108N/m、1 ×109N/m和2 ×108N/m;行星架与输出轴的扭转刚度为2.2 ×109(N·m)/rad;双齿联轴器与内齿轮及固定齿圈接触的切向刚度分别为1.1 ×1012N/m、6.1×1011N/m;按(10)式计算的人字齿内外啮合刚度平均分量分别为8.689×109N/m 和7.488×109N/m.各齿轮偏心误差分别为20 μm,内外啮合的齿频误差分别为10 μm.
本文从啮合刚度平均分量和交变分量2 个方面研究行星传动系统内外啮合刚度对内外啮合动态载荷特性的影响。由于内啮合刚度对外啮合动载系数及外啮合刚度对内啮合动载系数的影响均很小,可以忽略,限于篇幅,不作赘述。
5.1 啮合刚度平均分量对动态载荷特性的影响分析
在外/内啮合刚度不变情况下,假设内/外啮合刚度交变分量保持不变,按内/外啮合刚度平均分量80%和100%计算内/外啮合动载系数随转速变化曲线如图5 ~图6 所示。可见,在转速区间大部分区域,按啮合刚度平均分量80%计算的内/外啮合动载系数明显减小,降低内/外啮合刚度平均分量可以减小内/外啮合动载系数。
啮合刚度平均分量越大,啮合线位移越小,通过改变啮合位移均衡载荷的能力越弱,载荷越不均衡,动载系数越大。所以降低内外啮合刚度平均分量可以增大啮合线位移的变化量,提高了啮合线位移变化均衡载荷的能力,减小了内外啮合动载系数。在转速区间的绝大部分区域,内外啮合刚度平均分量越大内外啮合动载系数越大,齿轮承担的动态载荷也越大。在转速区间很窄的局部区域,由于存在共振,内外啮合刚度平均分量较小时,反而内外啮合动载系数较大。
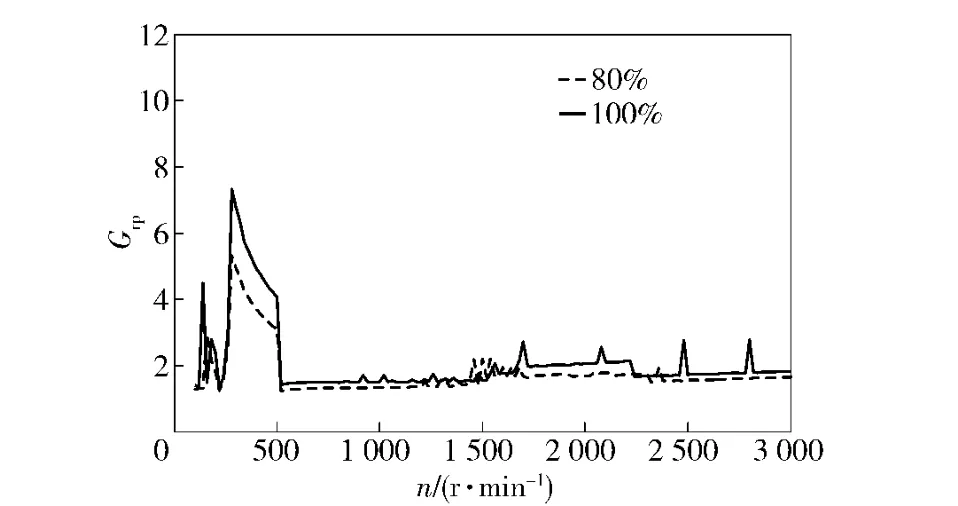
图5 不同内啮合刚度平均分量作用下内啮合动载系数Fig.5 Dynamic load coefficients of internal mesh under action of different average components of internal mesh stiffness
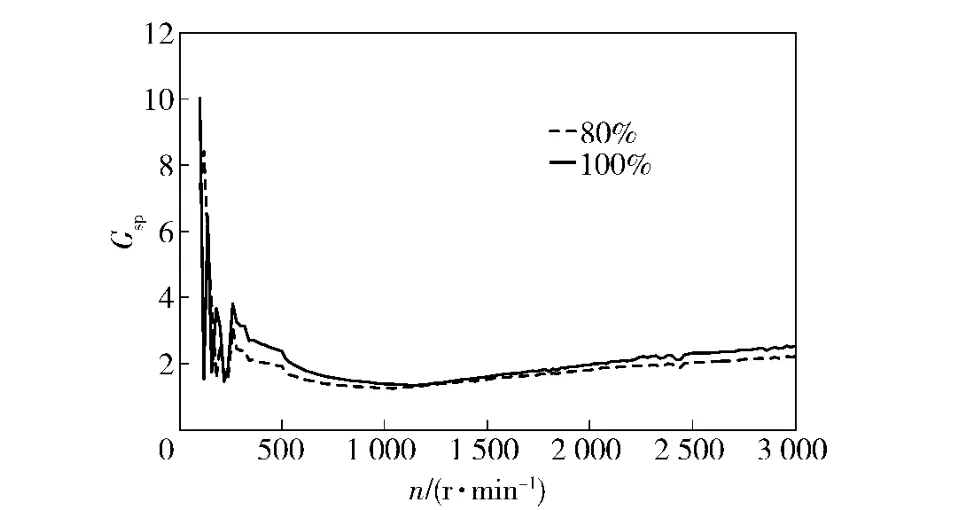
图6 不同外啮合刚度平均分量作用下外啮合动载系数Fig.6 Dynamic load coefficients of external mesh under action of different average components of external mesh stiffness
5.2 啮合刚度交变分量对动态载荷特性的影响分析
在外/内啮合刚度不变情况下,假设内/外啮合刚度平均分量保持不变,按内/外啮合刚度交变分量0%(不考交变分量)和100%计算内/外啮合动载系数随转速变化曲线如图7 ~图8 所示。可见,不考虑啮合刚度交变分量的内外啮合动载系数曲线与算例情况下动载系数曲线基本重合,所以图7 ~图8中仅显示一条曲线。
为清楚显示内外啮合刚度交变分量变化对内外啮合动载系数的影响,分别提取图7 和图8 中1 450 ~1 550 r/min 部分,如图9 ~图10 所示。可见,不考虑交变分量计算的动载系数曲线与算例情况下动载系数曲线实际上不重合,内啮合刚度交变分量变化对内啮合动载系数的影响很小。
人字齿接触线长度交变分量幅值很小,对应的人字齿啮合刚度交变分量幅值同样很小,算例中人字齿轮副内外啮合刚度交变分量幅值分别为0.24 ×109N/m 和0.29 ×109N/m,仅为对应平均分量的2.76%和3.87%,远小于直齿轮啮合刚度交变分量幅值,所以人字齿行星传动系统啮合刚度交变分量变化对动载系数影响很小,见图7 ~图10.这也是人字齿轮相比直齿轮啮合平稳、振动较小的原因。
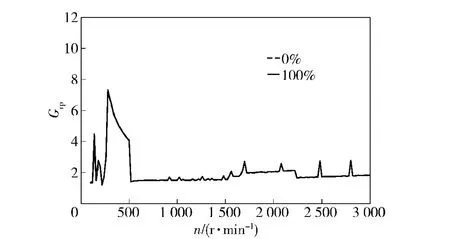
图7 不同内啮合刚度交变分量作用下内啮合动载系数Fig.7 Dynamic load coefficients of internal mesh under action of different alternate components of internal mesh stiffness
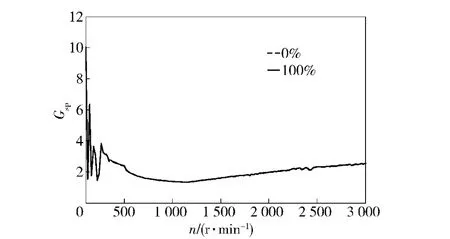
图8 不同外啮合刚度交变分量作用下外啮合动载系数Fig.8 Dynamic load coefficients of external mesh under action of different alternate components of external mesh stiffness
对于人字齿行星传动系统,由于人字齿啮合刚度交变分量对动载系数影响很小,所以进行动力学方程求解时不考虑啮合刚度的交变分量,以啮合刚度平均分量代替啮合刚度计算的动载系数与准确值偏差不大,在计算精度要求不太高的情况下是可行的。
6 结论
1)啮合刚度平均分量越大,啮合线位移越小,通过改变啮合位移均衡载荷的能力越弱,动载系数越大。在不考虑共振的情况下,内外啮合刚度平均分量越大,内外啮合动载系数越大,齿轮承担的动态载荷也越大。
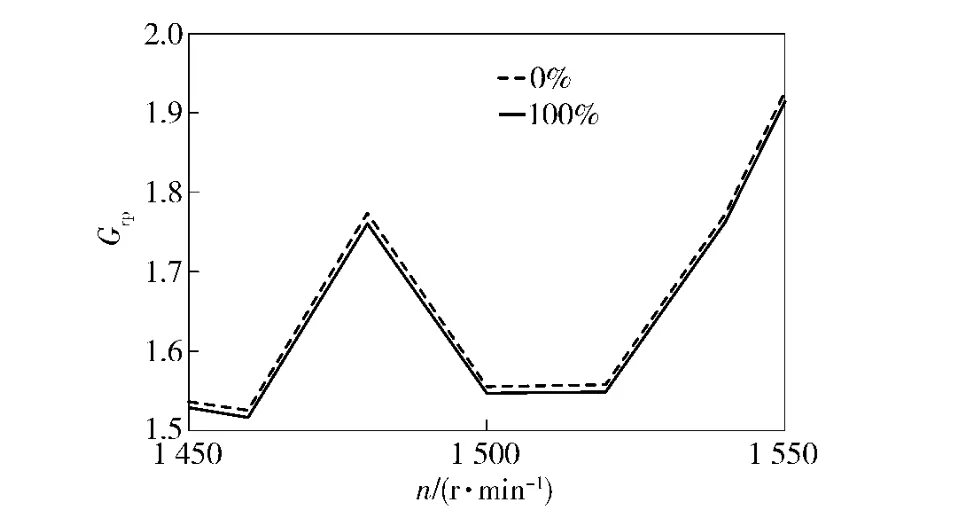
图9 局部转速区间内啮合动载系数Fig.9 Dynamic load coefficients of internal mesh in local speed range
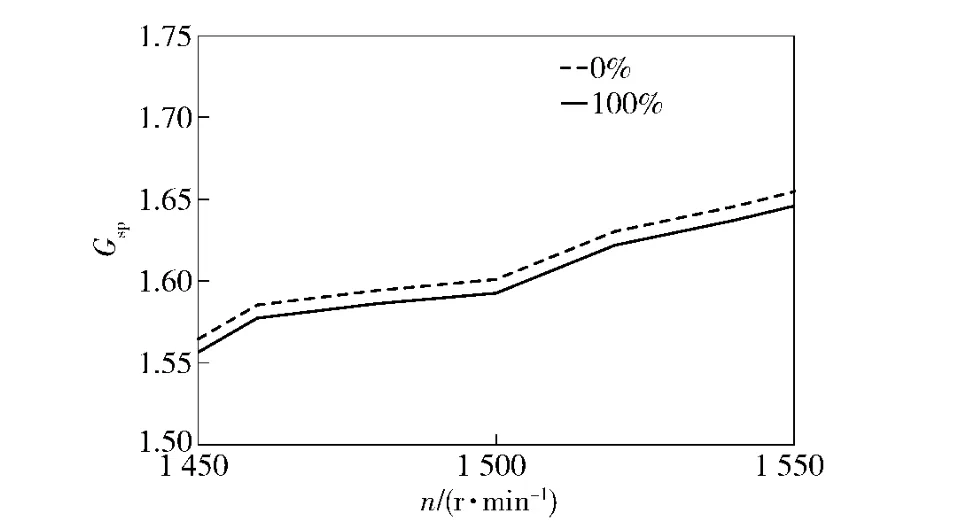
图10 局部转速区间外啮合动载系数Fig.10 Dynamic load coefficients of external mesh in local speed range
2)由于人字齿接触线长度交变分量幅值较小,与此相对应的人字齿啮合刚度交变分量幅值同样较小,所以人字齿啮合刚度交变分量对动载系数的影响很小,这也是人字齿轮运转平稳,振动较小的原因。
3)进行人字齿行星传动系统动载系数计算,在精度要求不太高的情况下,求解动力学方程时以啮合刚度平均分量表示啮合刚度是可行的。
References)
[1]Cunliffe F,Smith J D,Welbourn D B.Dynamic tooth loads in epicyclic gears[J].Journal of Engineering for Industry,1974,96(2):578 -584.
[2]Kahraman A.Planetary gear train dynamics[J].Journal of Mechanical Design,1994,116(3):713 -720.
[3]方宗德,沈允文,黄镇东.2K-H 行星减速器的动态特性[J].西北工业大学学报,1990,10(4):361 -371.FANG Zong-de,SHEN Yun-wen,HUANG Zhen-dong.Dynamic characteristics of 2K-H planetary gearing [J].Journal of Northwestern Polytechnical University,1990,10(4):361 -371.(in Chinese)
[4]袁茹,纪名刚.航空行星减速器的振动特性分析[J].航空动力学报,1995,10 (4):395 -398.YUAN Ru,JI Ming-gang.Analysis of vibration behavior in aerospace planetary reducer[J].Journal of Aerospace Power,1995,10(4):395 -398.(in Chinese)
[5]Ma P,Botman M.Load sharing in a planetary gear stage in the presence of gear errors and misalignments[J].Journal of Mechanical Design,1985,107(1):4 -10.
[6]Singh A.Application of a system level model to study the planetary load sharing behavior[J].Journal of Mechanical Design,2004,127(3):469 -476.
[7]Kahraman A.Load sharing characteristics of planetary transmissions[J].Mechanism and Machine Theory,1994,29(8):1151 -1165.
[8]Krantz T L,Delgado I R.Experimental study of split-path transmission load sharing,107202 [R].San Diego:NASA Technical Memorandum,1996.
[9]Lin J,Parker R G.Planetary gear parametric instability caused by mesh stiffness variation[J].Journal of Sound and Vibration,2002,249(1):129 -145.
[10]Lin J,Parker R G.Mesh stiffness variation instabilities in twostage gear systems[J].Journal of Vibration and Acoustics,2002,124(1):68 -76.
[11]Guo Y C,Parker R G.Sensitivity of general compound planetary gear natural frequencies and vibration modes to model parameters[J].Journal of Vibration and Acoustics,2010,132 (1):011006 -011018.
[12]赵永强,李瑰贤,常山,等.舰船用两级行星传动系统的固有频率啮合刚度敏感度分析[J].舰船力学,2010,14(1):24 -30.ZHAO Yong-qiang,LI Gui-xian,CHANG Shan,et al.Sensitivity of two stage double helical tooth planetary gear natural frequencies to meshing stiffness[J].Journal of Ship Mechanics,2010,14(1):24 -30.(in Chinese)
[13]孙涛.行星齿轮系统非线性动力学研究[D].西安:西北工业大学,2000.SUN Tao.Study on nonlinear dynamics of planet gear[D].Xi'an:Northwestern Polytechnical University, 2000.(in Chinese)
[14]李润方,王建军.齿轮系统动力学[M].北京:科学出版社,1997:160 -162.LI Run-fang,WANG Jian-jun.Dynamics of gear system[M].Beijing:Science Press,1997:160 -162.(in Chinese)
[15]Maatar M,Velex P.An analytical expression for the time-varying contact length in perfect cylindrical gears: some possible applications in gear dynamics[J].Journal of Mechanical Design,1996,118(12):586 -589.
[16]Parker R G,Lin J.Mesh phasing relationships in planetary and epicyclic gears[J].Journal of Mechanical Design,2004,126(3):365 -370.
[17]国家标准局.GB 3480—83 渐开线圆柱齿轮承载能力计算方法[S].北京:国家标准局,1983.National Standards Institute.GB 3480—83 calculation methods of load capacity for involute cylindrical gears[S].Beijing:National Standards Institute,1983.(in Chinese)
[18]方宗德,沈允文,黄镇东.三路功率分流恒星式减速器的动态特性[J].航空学报,1990,11(7):341 -350.FANG Zong-de,SHEN Yun-wen,HUANG Zhen-dong.The dynamic behaving of star gearing with three branches[J].Acta Aeronautica et Astronautica Sinica,1990,11(7):341 - 350.(in Chinese)
猜你喜欢
疯狂英语·读写版(2023年12期)2023-02-20 18:41:06
中国造纸(2022年8期)2022-11-24 09:43:38
一重技术(2021年5期)2022-01-18 05:42:12
江苏安全生产(2021年5期)2021-07-16 06:47:22
百科探秘·航空航天(2020年6期)2020-07-09 03:31:06
中学生数理化·八年级物理人教版(2019年5期)2019-06-25 00:58:58
读者(2018年20期)2018-09-27 02:44:48
电子制作(2018年10期)2018-08-04 03:24:26
设备管理与维修(2016年7期)2016-04-23 06:51:41
少儿科学周刊·儿童版(2016年1期)2016-03-14 03:56:27